
卫星地球站电磁环境噪声的自动化测试设计
2023-02-03 02:56沈小青
自动化仪表 2023年1期
夏 伟,沈小青,施 柳,王 珏
(1.中国卫星海上测控部,江苏 江阴 214431;中铁上海局有限公司,上海 200434)
0 引言
电磁环境可控是卫星地球站设备正常工作的必要前提。信噪比是衡量通信接收机能否准确接收解调信号的关键指标。因此,各种噪声对系统的影响成为亟待研究和解决的问题[1-3]。相关研究表明,大气损耗每增加1 dB,噪声温度就会相应增加55 K。对于卫星通信系统,天线噪声温度约为60 K,低噪声放大器等效噪声温度约为50 K。因此,参考系统自身噪声温度门限,外部电磁环境的噪声估算偏差将会对系统实际性能的准确评估产生明显影响[4-5]。除大气损耗噪声以外,外部环境还包括雨雾、太阳、黑体和银河系等多种背景噪声。这些背景噪声在特定条件下都会对卫星通信系统链路产生影响。尤其是在深空探测应用中,外部环境噪声的测量与计算将成为深空卫星通信系统设计的重要参考依据。因此,开展电磁环境噪声的监测技术研究具有重要意义[6-9]。
针对上述问题,本文借鉴微波噪声Y系数测量原理,构建了天线输出端等效噪声温度测量模型,并对测量模型进行了不确定度评定。在此基础上,通过Excel软件和VBA编程完成了电磁环境噪声的自动化测试设计,并通过监测试验对测量效果进行了验证。
1 电磁环境噪声的测试原理
目前,电磁环境噪声测试方法主要参考技术规范为GB 13615—2009《地球站电磁环境保护要求》。电磁环境噪声测试原理如图1所示。

图1 电磁环境噪声测试原理图
根据无线电噪声测量原理,电磁环境噪声测试方法在较低功率噪声条件下,存在测试结果可靠性不高的问题。产生该问题的原因是当干扰噪声功率较小时,测试系统中测试天线、低噪声放大器和频谱分析仪自身引入的噪声影响难以消除,从而对测量结果产生明显影响[10]。
为解决上述问题,本文提出一种基于Y系数法的电磁环境噪声测试方法。基于Y系数法的电磁环境噪声测试原理如图2所示。
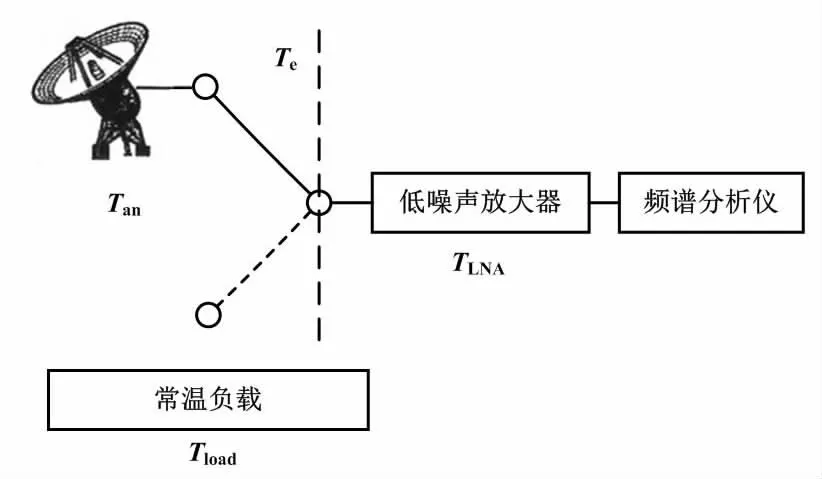
图2 基于Y系数法的电磁环境噪声测试原理图
如图2所示,当低噪声放大器输入端接天线时,频谱分析仪测得的噪声功率为:
Nant=kBG(Tan+Te)
(1)
式中:Nant为系统热态噪声功率;k为玻尔兹曼常数,k=1.380 649×10 J/K;B为系统带宽;G为放大器增益;Tan为天线等效输出噪声温度;Te为接收机等效噪声温度。
当低噪声放大器输入端接常温负载时,频谱分析仪测得的噪声功率为:
Nload=kBG(Tload+Te)
(2)
式中:Nload为系统冷态噪声功率;Tload为常温负载噪声温度。
根据Y系数的噪声测量原理,可得:
(3)
通过式(3)即可得天线等效输出噪声温度的测量模型:
Tan=Y(Tload+Te)-Te
(4)
接收机等效输入噪声温度测试原理如图3所示。天线输出端主要设备包括低噪声放大器、衰减器以及测试频谱仪。

图3 接收机等效输入噪声温度测试原理图
接收机等效输入噪声温度Te可表示为:
kBGATe=kBGATe1+kBATe2+kBTe3
(5)
式中:Te1为放大器等效输入噪声温度;Te2为衰减器等效输入噪声温度;A为衰减;Te3为频谱仪等效输入噪声温度。
则有:
(6)
对于电磁环境噪声测量应用,噪声信号通常都很微弱。因此,G较大而A较小。则式(6)后两项可忽略。故Te主要由Te1决定,即Te≈Te1。
对于多个设备级联的系统,若第一级的功率增益G很高,则Te可直接使用Te1估计,即Te1=TLNA。因此,天线输出端等效噪声温度测量模型为:
Tan=Y(Tload+TLNA)-TLNA
(7)
式中:TLNA为低噪声放大器噪声温度。
2 电磁环境噪声的测量不确定度
在物理量的实际测量中,无论是直接测量还是间接测量,由于测量仪器、方法以及外界条件的影响等因素的限制,使得测量值与真实值之间存在差值。为了实现对测量结果的准确度和可靠性评估,有必要对测量不确定度进行分析。测量不确定度定义为:与测量结果相关联的参数,表征合理地赋予被测量值的分散性。为便于表述,一般以u表示不确定度分量、uc表示合成标准不确定度。
由天线输出端等效噪声温度测量模型可知,不确定度测量属于间接测量,且各输入量之间互不相关。则根据不确定度传播规律,输出量的合成标准不确定度为:

(8)

通过偏导数,求得:
(9)

(10)

(11)
式中:u(Nant)为频谱仪信号功率的测量标准不确定度。
当使用对数单位表示时,Y=Nant-Nload。
由于使用同一台频谱仪测得Nload和Nant,因此两者相等,即u2(Nload)=u2(Nant)。则:
(12)
以德国R&S公司FSV频谱仪为例,其刻度线性度引入的标准偏差为0.03 dB,则其相对电平测量的标准不确定度为u(Nant)=0.03 dB。

对数单位换算为线性单位,则有u(Y)≈1.0%。把上述分量代入式(8),可得电磁环境噪声测量标准不确定度为:
uc(Tan)≈
(13)
3 电磁环境噪声的自动化测试设计
电磁环境噪声测试在地球站的选址和日常维护中都有应用。由于测试过程持续时间较长、测试数据较多,人工记录存在测试效率低下的问题。因此,开展电磁环境噪声的自动化测试对提高测试效率具有积极意义[11-13]。根据第1节电磁环境噪声的测试原理,自动化测试系统包括自动化测试流程设计,以及噪声数据和天线指向查询处理两个方面。
这些测试程序基于Excel软件和VBA编程实现。仪器驱动选择Agilent IO Libraries Suite。
(1)自动化测试流程设计。
自动化测试主要完成电磁环境噪声信号的采集。自动化测试流程如图4所示。

图4 自动化测试流程图
①系统连接。系统连接主要完成测试计算机和测试仪器的总线连接,并对系统测试参数进行初始化,包括测试频率范围、分辨率带宽、参考电平和输入衰减等参数。
②系统校准。系统校准主要完成系统冷态噪声功率和负载温度的测量,即低噪声放大器输入端接常温负载时的噪声功率。
③噪声测试。噪声测试主要完成天线在各个方向的系统热态噪声功率测量。由于该过程需动态调整天线指向,因此测试时间持续时间较长。
(2)噪声数据和天线指向查询处理。
由于天线伺服控制为独立系统,在噪声测试阶段缺乏实时获取天线方位俯仰数据的通信接口,只能通过事后查询系统日志获得。因此,需通过时间对齐把天线指向和噪声数据进行关联。噪声数据和天线指向查询流程如图5所示。

图5 噪声数据和天线指向查询流程图
4 电磁环境噪声监测系统的测试验证
为验证电磁环境噪声监测系统的性能,以某型卫星地球站设备为例,开展测试验证试验。其中,测试频谱仪选择R&S-FSV系列。地球站工作频段为S频段,中频输出中心频率为70 MHz,带宽为20 MHz。
首先,对电磁环境噪声监测进行需求分析。电磁环境噪声监测需求分析如表1所示。
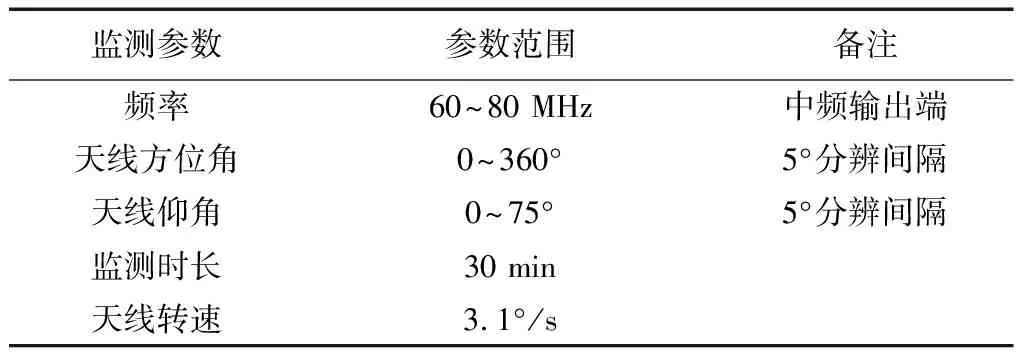
表1 电磁环境噪声监测需求分析
其次,根据监测需求分析参数,开展电磁环境噪声监测试验。电磁环境噪声监测主要包括电磁环境噪声信号原始数据的采集,以及天线各方位俯仰条件下的环境噪声温度计算。电磁环境噪声监测结果如表2所示。
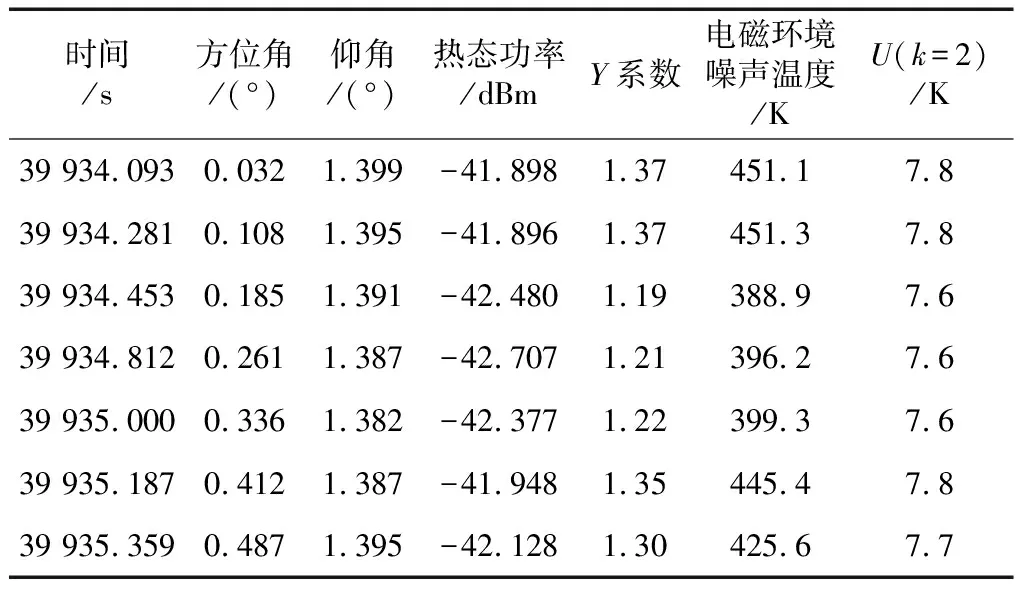
表2 电磁环境噪声监测结果
①电磁环境噪声温度。
转化为线性单位,则Y≈1.194 8。由表2可知,TLNA=45 K、Tload=318.5 K、Tan=1.194 8×(45+318.5)-45≈388.9 K。
②测量结果的扩展不确定度。
电磁环境噪声测量标准不确定度为uc(Tan)≈3.8 K。
扩展不确定度为U=2uc(Tan)≈7.6 K,k=2。
③采样速度和空间分辨间隔典型值分析。
电磁环境噪声功率的采样速度不低于5帧/s。当天线按3.1°/s速度转动时,5°间隔过渡时间为1.6 s,可得5°分辨间隔内的噪声采样帧数为8帧,可以满足一般测量重复性要求。进一步降低天线转速,则可以实现空间分辨间隔≤5°。此时,监测时长也会相应增加。
5 结论
本文提出一种卫星地球站电磁环境噪声的测试方法,通过计算机自动采集频谱分析仪测量的噪声功率值和天线运行轨迹,实现了地球站天线周边空间电磁环境噪声温度的自动测量和不确定度评估。与标准规范推荐方法相比,由Y系数法噪声测量原理可知,本文所述方法可以去除低噪声放大器和频谱分析仪自身噪声对测量结果的影响,对于提高低噪声条件下的电磁环境噪声功率测量准确度具有积极意义。通过对实测过程中影响测量结果的不确定度分量进行评估,给出了电磁环境噪声温度监测结果的不确定度评定方法。试验结果表明,在噪声功率采样速度≥5帧/s、空间监测分辨间隔≤5°的条件下,系统电磁环境噪声的测量不确定度urel=2.0%,k=2。该研究对于电磁环境噪声的监测质量评估具有借鉴意义。
猜你喜欢
声学技术(2022年3期)2022-07-29
资源信息与工程(2021年5期)2022-01-15
皮革制作与环保科技(2021年5期)2021-11-27
中国生物医学工程学报(2019年4期)2019-07-16
电子制作(2018年23期)2018-12-26
中国交通信息化(2017年10期)2017-06-06
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
中国卫生标准管理(2015年16期)2016-01-20
