Android 智能手机海面高度测量及其遥感应用
2023-01-31 02:14:08王峰李杰杨东凯
北京理工大学学报 2023年2期
王峰,李杰,杨东凯
(北京航空航天大学 电子信息工程学院,北京 100191)
近岸区域的海陆作用频繁,是海洋系统及人类活动和生产的重要组成部分[1]. 随着沿海人口持续增多和经济不断发展,近岸海域的高度变化监测对海洋工程和灾害预警等方面具有重要意义. 传统观测手段为验潮站等原位测量,建设成本高,不利于在近岸海域大范围部署,且易受地表垂直运动影响. 随着无线电测距技术发展,高度计等微波遥感手段被用于海面高度测量. 自20 世纪70 年代卫星测高首次实施以来,卫星测高已取得成功,获取的全球高精度海面高度促进了人类对海洋的认知[2]. 在近岸海域由于陆地对微波信号的影响,星载高度计接收的回波波形发生改变,使其测量精度下降,且由于时空分辨率限制,无法实时的监测近海高度变化[3]. 岸基遥感平台观测区域固定、且支持长期稳定测量,可作为星载遥感的补充手段提供近海高度信息. 全球导航卫星系统(global navigation satellite system,GNSS)不仅为全球用户提供了位置、速度和时间信息,而且可作为机会源信号被用于陆海面遥感[4-5]. 该技术被称作GNSS 反射信号(GNSS reflectometry,GNSS-R),通过协同接收、处理直达和经地表反射的GNSS 信号反演地球表面物理参数. 被动无源的特点使其功耗和成本低,利于在沿海,尤其在野外供电受限区域的大规模部署. GNSS-Interferometric/Multipath R(GNSS-I/MR)技术通过利用导航接收机输出的信噪比、伪距及载波相位时序的振荡现象进行地表参数的测量[6],已被用于地基海面风速[7]、有效波高[8]、海冰[9],土壤湿度[10]、植被[11]探测及积雪厚度探测[12]等应用. 目前该技术主要利用现有的GNSS 连续运行基准站(GNSS continuously operating reference stations,GNSS CORS)的测绘接收机进行海陆参数的测量. 在海面高度测量方面,该技术利用现有导航设备进行测量,建站成本较双天线GNSS-R 低. STRANDERG 等[13]利用无迹卡尔曼滤波和B-样条插值结合的方法,获得了精度优于5 cm 的海面高度测量结果. 在海洋业务应用方面,国内外学者也已开展了该技术在风暴潮异常增水监测[14-15]中的应用. 上述研究均表明该技术已初步具备业务化应用的能力. 由于CORS 站在设计天线、射频电路及信号处理算法时,均考虑多径信号对定位精度的影响而增加了抑制多径的模块或算法,因此CORS 站对地表反射的多径信号有抑制作用,尤其对高高度角信号. 这使得CORS 站仅能用高度角小于30°的信号测量海面高度,降低了时间采样率. 此外,CORS 站的高成本也阻碍该技术大规模组网部署. 为了利用高高度角的海面反射信号,文献[16 - 17]提出了利用低成本GNSS 天线和接收机代替测绘天线和接收机的方法,结果表明可有效提高观测的时间采样率,且在无强干扰环境下海面高度测量性能和CORS 站相当.
随着智能手机的普及,基于智能手机的应用正飞速拓展. 2016 年Google 公司在Android 操作系统上提供了访问GNSS 数据的API 接口[18],旨在促进智能手机高精度定位的发展[19]. 基于智能手机的遥感也已被开始研究. ALTUNTA 等[20]初步论证了利用智能手机的GNSS 数据测量反射面高度的想法. KURUM等[21]将两部智能手机搭载于无人机上分别接收直达和经地表反射的GNSS 信号,首次论证了智能手机探测地表水含量的可行性. 本文将论证智能手机GNSS 数据测量海面高度的可行性,并利用实测数据评估高度测量性能. GNSS 全向型天线除了接收海面反射信号,还能接收天线周围非探测区域反射的多径信号. 为了减低非探测区域的多径信号对高度测量的影响,本文提出经验模态分解对GNSS 数据提纯的方法. 此外,本文也将对智能手机的遥感应用面临的问题、机遇进行思考和展望.
1 海面高度测量原理
1.1 几何构型
如图1 所示海面高度可通过测量设备距离海面和大地参考面的高度得到


图1 GNSS-I/MR 几何构型Fig. 1 Geometry of GNSS-I/MR
式中:hr和Hr分别为测量设备距离海面和大地参考面的高度. 测量设备相对于大地参考面的距离可在安装时精确测量. 为了得到海面高度需知道测量设备距海面的高度.
1.2 高度测量原理
GNSS-I/MR 通过直射信号和海面反射的信号的干涉效应测量设备距海面的高度,是一种典型的时序测量方法. GNSS 的接收信号功率为[6]

式中:右侧第一和二项为功率变化的趋势项;而第三项为功率变化的振荡项. 将式(2)带入振荡项可得

式中, λ为信号波长. 当以 2sinθ/λ为自变量时,测量设备距海面的高度hr为振荡项的振荡频率. 通常利用信噪比(signal-to-noise ratio, SNR)代替信号功率.特征. 此外,随着高度角增加,线极化信号信噪比的振荡幅度衰减速度较右旋圆极化信号衰减缓慢. 这是利用线极化测量地表参数的另一优势,即在利用高高度角的信噪比时能够提供更高的性能. 由于智能手机提供的GNSS 数据中除了位置信息外,也包含了信噪比,因此可利用智能手机测量海面高度. 由于智能手机空间限制,其导航天线采用线极化天线.
2 经验模态分解
由于进入GNSS 天线的信号除了直射和经海面反射信号外,还可能包含了天线周围其他物体反射的多径信号,为了提取直射和海面反射信号的振荡特征,本文利用经验模态分解(empirical mode decomposition, EMD)对信噪比进行分解. EMD 基于时序局部特征的时间尺度,把时序分解为若干个内涵模式分量. 假设ri(t)为 剩余时序分量,hi(t)为时序的第i个模态分量,时序x(t)的EMD 的具体步骤如下[22]:
1)初始化r0(t)=x(t),i=1;
2)令hj(t)=ri(t);
3)利用3 次样条拟合hj(t)的上下极值点的包络线emax(t)和emin(t),以及上下极值包络线的平均值m(t);
4)在hj(t)中 减 去m(t)得 到 新 时 序hj+1(t),并 判 断hj+1(t)是否满足内涵模态分量的条件,若满足则令hi(t)=hj+1(t), 否则令hj(t)=hj+1(t)并重复步骤3 和4;
5)从时序ri(t)减 去第i个分解模态分量hi(t)得到残余分量ri+1(t), 判断ri+1(t)中是否存在两个以上极值,若是则并重复2)~5)步骤,否则结束分解.
为了理解EMD 分解,构建时序:

其 中,k,f1和f2分 别 预 设 为0.026,2 和6.kt模 拟信噪比时序的趋势项;第一个余弦项模拟干扰项;而第二个余弦项模拟有效干涉振荡,其时域和频域分布如图3 所示.
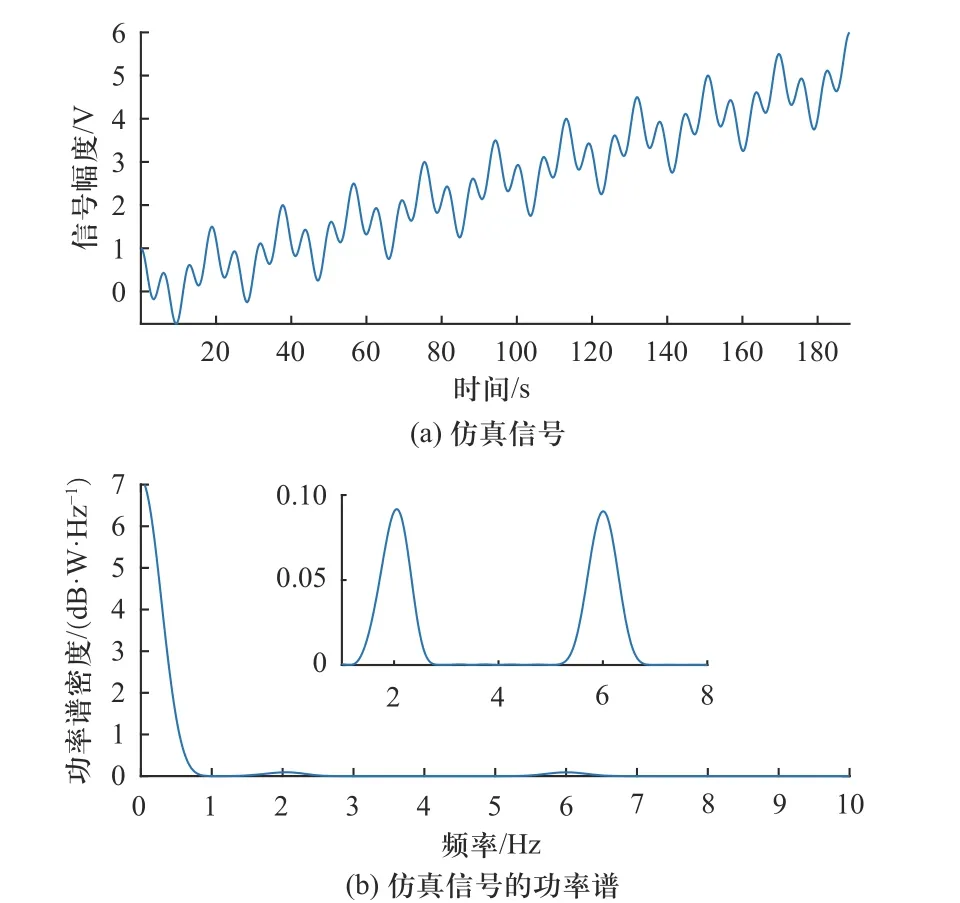
图3 仿真信号及其功率谱密度Fig. 3 Simulated signal and corresponding power spectrum density
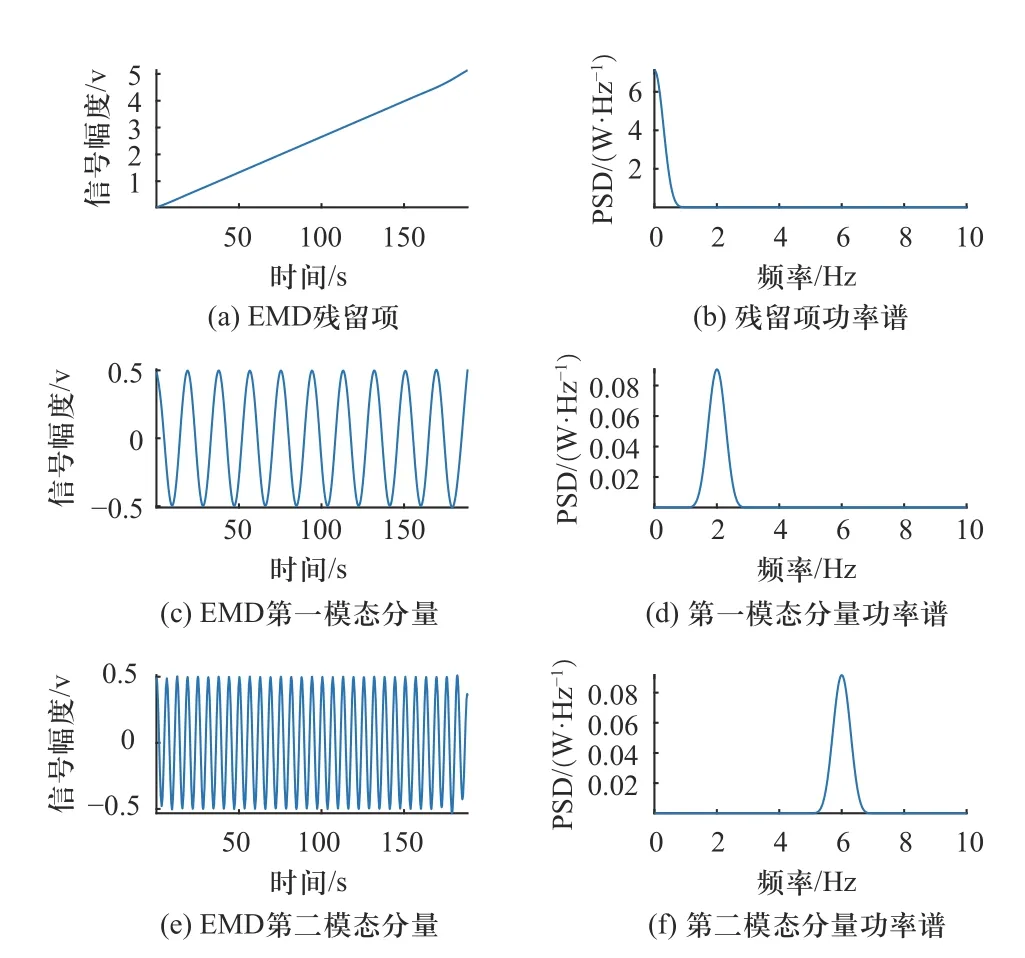
图4 仿真信号的EMD 分解结果Fig. 4 EMD results of simulated signal
3 试验验证
3.1 试验场景
为了验证智能手机测量海面高度的可行性,在山东省东营市青东五验潮站(北纬37°26′51″;东经119°0′36″)开展了外场试验. 试验时间为2021 年11月02 日至11 月20 日. 试验场景如图5 所示,智能手机距海面约9 m,天线方位角约210°. 智能手机的北向为高度约3 m 的建筑物,其上布置了太阳能电池板、高塔及护栏等. 这些设施不仅遮挡了北向的GNSS 信号,且反射的信号均可进入智能手机天线,对海面高度测量产生干扰. 试验期间,采用的智能手机为小米6,支持GPS 定位. 本文通过Geo++ RINEX Logger App 对小米 6 的GPS L1 导航数据进行了提取和存储. 为了对比智能手机和测绘接收机的海面高度测量性能,试验期间也安装了一套华测北斗公司的N72 测绘接收机. 测绘接收机连接司南公司的AT340 四系统全频点通用导航天线. 同比数据由浮子式验潮仪提供. 同时验潮站装配的风杯式风速测量仪提供了试验期间的风速信息.
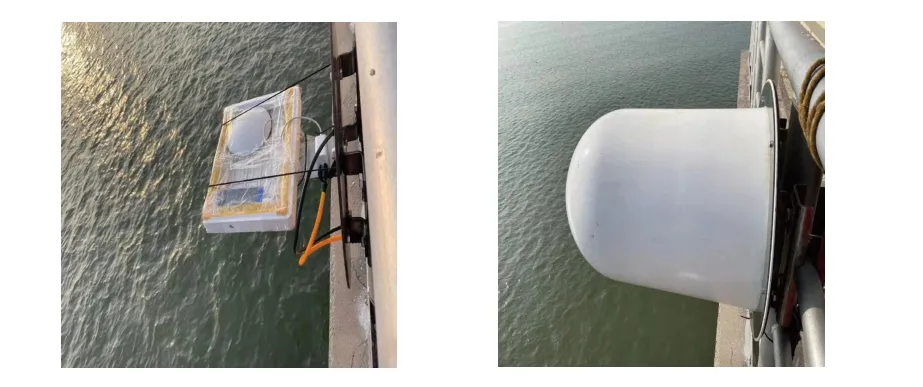
图5 智能手机测量海面高度验证试验场景Fig. 5 Experiment scenario of sea surface height measurement using smartphone
3.2 数据处理
图6 给出了海面高度测量的流程. 根据小米 6 和华测北斗公司的Rinex 文件格式对GNSS 数据进行解析,获取GNSS 数据中的卫星PRN 号,信噪比、高度角和方位角时序. 由于Geo++ RINEX Logger 提取的GNSS 数据中不包含卫星高度角和方位角. 本文通过GPS 官网的星历文件计算数据采集时刻的卫星高度角和方位角. 由于北向信号被建筑物遮挡,因此本文选择方位角为100° ~ 300°的信噪比时序进行海面高度测量;而高度角不做严格限制. 一旦获得符合方位角限制条件的SNR 时序,首先进行EMD 处理获得各内涵模式分量,并对每个模式分量进行遍历;然后对每个模态分量进行L-S 谱估计[6]并提取谱的峰值频率、谱宽度及主-次峰值比3 个特征观测量;其次利用阈值法对谱估计结果进行质量控制提取有效谱,其中谱宽度小于预设Tw, 主-次峰值比大于TR,而峰值频率位于区间 [Tfmin,Tfmax]. 本文中Tw,Tz,Tfmin和Tfmax可通过统计分析观测异常区间予以确定,本试验中分别预设为1.0, 1.5,0.66 和1.14. 如果上述条件均满足则跳出模态分量遍历,利用hr=fpeak·λ/2得到智能手机距海面的高度,并利用式(1)得到海面高度. 如果不满足,则继续遍历下一个模态分量至所有分量被遍历完.图7 为小米6 实测的GPS L1 CA 信号的SNR 的EMD 结果,其中图7(a)和(b)分别为原始SNR 时序的时域和频域分布;(c)和(d)分别为残余分量的时域和频域分布;(e)~(m)为各内涵模态分量的时域和频域分布. 由图7 可知,原始SNR 序列随高度角的振荡混乱,频谱表现了多峰值现象. 残余分量承载了SNR 的总体趋势,在频谱上体现了直流特征. 各内涵模态分量承载了不同频率特征或时间尺度的特征,从上至下模态分量所表征的时间尺度变小,频谱向高频移动.
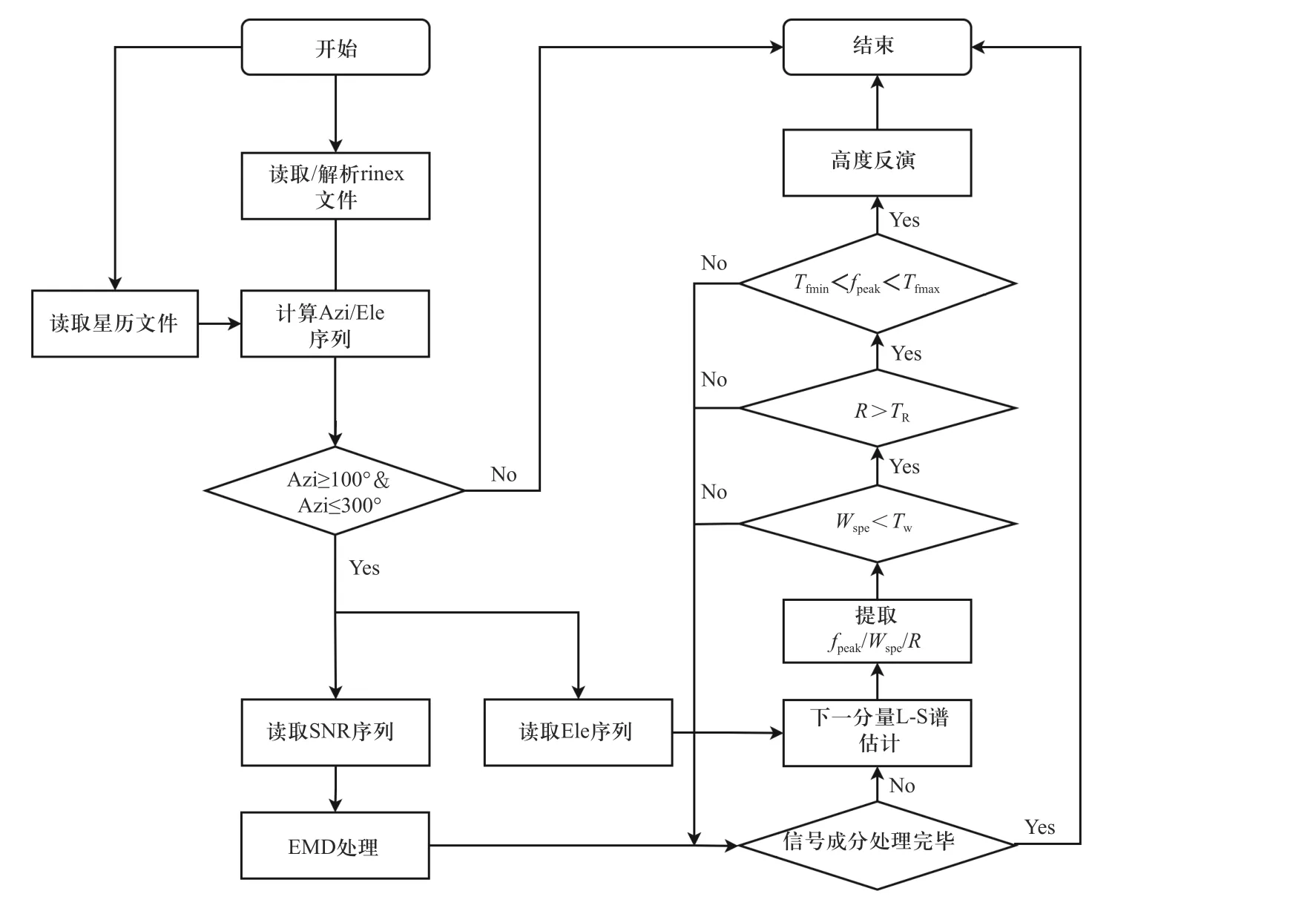
图6 海面高度测量流程Fig. 6 Flowchart of sea surface height measurement

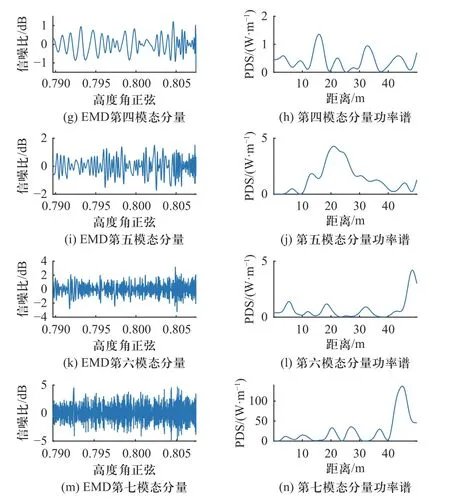
图7 小米6 的实测SNR 序列的EMD 结果Fig. 7 EMD results of measured SNR from Xiaomi 6
图7(g)所示的模态分量为海面反射信号的干涉振荡. 值得注意的是图7(l)所示的高频振荡,其表征了时间尺度最小的时序特征,通常时序的最小尺度特征主要为噪声特征,但其频谱并未体现噪声频谱特性. 该特征是否由海面波流等因素引起值得进一步分析和研究.
3.3 结果分析
对智能手机和测绘接收机采集的数据进行如图6 所示的处理得到海面高度测量,并与验潮站同比数据进行对比. 如图8 和图9(a)所示,智能手机和测绘接收机的大部分测量结果和同比数据呈现了良好的一致性,与同比数据之间的散点均围绕在1∶1 线周围,相应的均方根误差均为0.31 m;图9(b)所示,在11 月7 号试验场地出现极端天气,风速突然升高导致海面粗糙度增大,海面反射信号的相干性减弱,干涉振荡质量变差,因此圆圈所示的测量高度与同比数据的误差较大.
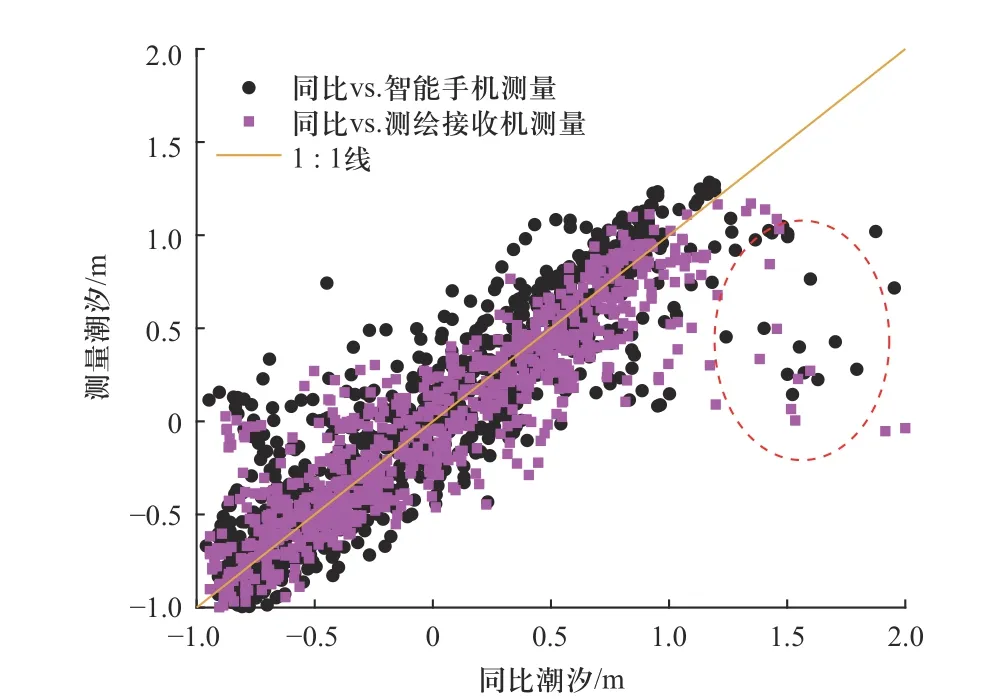
图8 测量的海面高度和同比的海面高度Fig. 8 Comparison between measured and in-situ sea surface height

图9 测量和同比海面高度的时序及相应时刻的海面风速Fig. 9 Time series of measured and in-situ sea surface height, and corresponding sea surface wind speed
图10 为均方根误差随海面风速的变化. 从图中可知,随着风速的增加,均方根误差增大,且在高风速段,智能手机的测量误差较测绘接收机小. 注意的是这并不代表岸基智能手机和测绘接收机的海面高度测量在高风速或高海况条件失效. 本文试验位于东营市青东五号验潮站,其位置在距海岸线~6 km的一个栈桥上,海况较海岸区域复杂. 智能手机~ 9 m的架设高度高于已有文献中CORS 站高度,使得海面反射信号的相干性更弱,干涉振荡质量较差. 此外尽管本文采用EMD 对海面反射信号进行了提纯,但北向房屋和栏杆反射的多径信号仍对海面高度测量产生了影响.
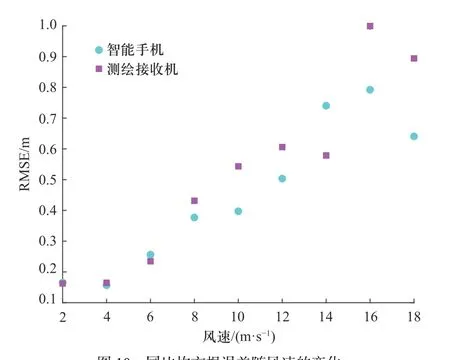
图10 同比均方根误差随风速的变化Fig. 10 RMSE versus wind speed
图2 可知在高高度角仍存在干涉振荡,此外线极化天线较右旋圆极化天线的干涉振荡更好. 图11为测量海面高度时SNR 时序对应的高度角下限和上限的统计结果. 由图可知高度角高于30°的SNR 时序仍可用于测量海面高度. 智能手机高度角下/上限高于30°的占比分别为总样本的30.8%和45.3%,而测绘接收机的占比分别为30.5%和47.0%. 相比于已有文献采用的CORS 站数据,本文的测绘接收机和智能手机均成功采集了高高度角的信噪比时序,且用于海面高度测量. 这说明在低高度的岸基场景高高度角的反射信号仍存在强相干成分,并和直射信号形成了干涉振荡. 当利用低成本右旋圆极化天线或线极化天线时,可利用高高度角的信噪比时序测量海面高度. 本文在18 天的时间内,智能手机共采集到约1 120 个观测值,平均每天62 个采样点,每小时2.6 个;而测绘接收机共采集到870 个观测值,平均每天54 个,每小时2.2 个,均比文献[22]每天至多40 个采样点高.
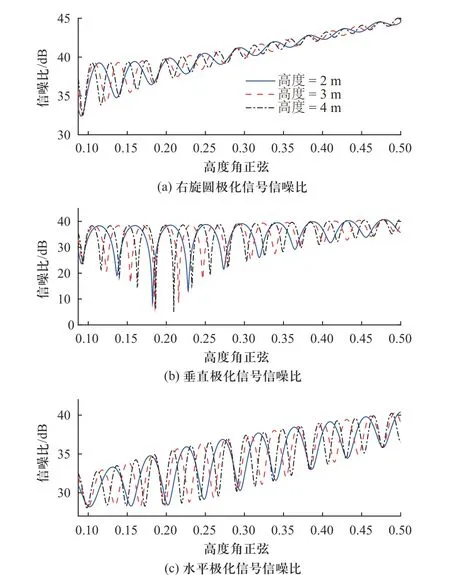
图2 右旋圆极化、垂直极化和水平极化信号信噪比随高度角正弦的变化Fig. 2 Right-handed circular polarization, vertical and horizontal SNR versus sine of elevation angle

图11 测量样本在不同高度角的统计结果Fig. 11 Statistical results of measured samples at different elevation angles
为了说明EMD 干涉振荡提纯方法的有效性,本文也直接对信噪比时序进行谱估计测量海面高度.智能手机和测绘接收机的均方根误差分别为0.33 m和0.36 m,高于EMD 提纯后测量的海面高度误差.图12 为测量的海面高度的均方根误差和高度角的关系. 在低高度角时,测绘接收机和智能手机呈现了相同的误差水平,而在高高度角时,测绘接收机的测量误差较智能手机大. 原因如图2 所示,高高度角的右旋极化干涉振荡明显弱于低高度角的振荡,使得干涉振荡随高度角的增加逐渐淹没在噪声中;而线极化振荡明显强于右旋极化振荡,在高高度角时,干涉振荡相比于噪声水平仍很高. 通过EMD 对干涉振荡提纯后,除了测量误差减小外,测绘接收机测量误差随高度角增大的趋势消失. 这说明EMD 不仅将非探测区域和海面反射的信号进行了分离,且抑制了干涉振荡中的噪声.
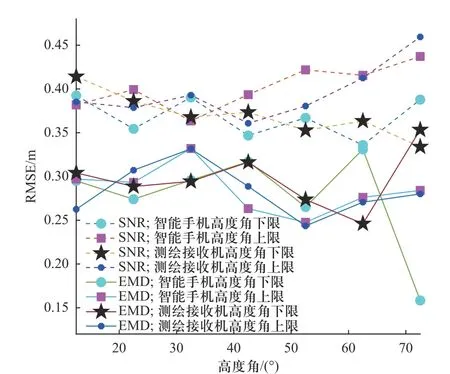
图12 海面高度测量同比均方根误差随高度角的变化Fig. 12 RMSE of measured sea surface height versus elevation angle
4 智能手机遥感应用
尽管CORS 站已被广泛部署,但海边部署的CORS站较少,远无法满足海面高度测量需求. 广泛部署CORS 站将带来巨大成本而难以实施. 本文采用的华测北斗公司的N72 测绘接收机一台约3 万元,司南公司的通用GNSS 全频点天线一套约700 元. 若基于CORS 站的海面高度测量系统需实时测量和远程传输功能时,还需增加嵌入式硬件和通信模块. 常用的Rasperry Pi 4 Model B-8GB ARM 微型计算机的成本约600 元,常规4 G 通信模块的成本约100 元. 若以上述模块建设CORS 站海面高度测量系统,总成本约3.14 万元. 试验中采用的小米6 目前市场价格600 元左右,且可基于其通用CPU、Android 系统开发实时测量功能和WIFI、蓝牙、蜂窝移动等通信模块用于远程传输. 从本文结果可知,低成本GNSS 天线和接收机亦可提供良好的海面高度测量结果,且较CORS 站可提供更多的测量样本以提高时间分辨率;此外成熟的低成本智能终端也可用于测量海面高度并提供相同水平的测量精度. 这对广泛部署岸基海面高度测量站具有重要意义.
本文论证了智能手机的GNSS 数据可用于测量海面高度,并初步评估了其性能. GNSS-I/MR 技术可已被用于雪深、土壤湿度及植被等参数的探测,且能获得较好的测量结果. 智能手机GNSS 天线采用线极化天线,相比于圆极化天线,其干涉振荡更剧烈,且具有更广的振荡范围. 该特征能有效提升高高度角信噪比时序测量地表参数的性能. 水平线极化除了振荡幅度对土壤湿度和植被敏感外,其振荡图样的“缺陷”也对土壤湿度和植被敏感. 这种“缺陷”已被用探测土壤湿度和植被[23-24],且通过联合水平和垂直极化可有效提高测量性能[25]. 线极化天线的极化特性和天线放置方向相关. 通过选择智能手机的不同放置方式可获取不同极化的GNSS 干涉振荡,进而获得最佳的地表参数反演性能,甚至可联合多个不同放置方式的智能手机的干涉振荡同步反演更多土壤湿度、植被水含量、植被高度及植被密度等参数. 线极化GNSS-I/MR 测量雪深的潜力和优势也已被研究[26-27]. CHEN 等[26]通过分析不同极化的干涉振荡对积雪的响应发现由于水平极化的干涉振荡较垂直极化和右旋圆极化的振幅更大,且其反射系数的相位相对稳定,因此较垂直极化和右旋圆极化更适合测量雪深. GNSS 信号对积雪具有穿透作用.陆表反射的信号和直射、积雪表面反射的信号也可形成干涉. 这种干涉使得雪深测量结果产生周期性误差[27]. 是否可联合不同放置方式的智能手机消除周期性测量误差提高测量精度值得研究. 综上所述智能手机的GNSS 数据也将在上述地表参数的探测中有巨大潜力.
遥感长期属于公益事业,即国家或企业投入资金,由专业机构开展算法研究,设备研制,数据采集和处理,并由专门的业务机构将遥感产品发布给各类用户. 随着智能终端,尤其智能手机的迅猛普及,以及其算力、存储力的不断增强和集成传感器的性能增强,而成本和价格不断降低,遥感开始由专业遥感走向满足大众需求的大众遥感[28-29]. 利用智能手机做遥感的机会载体不仅大大降低了遥感成本,适宜大规模部署,且通过构建基于智能手机的大众化遥感数据采集技术和体制将大大推动“泛在”遥感的建立. 此外,智能手机包含了WIFI、蓝牙、蜂窝移动等无线数据通信功能,为遥感数据的传输和共享提供了天然便利,可根据应用场景选择合适手段实现数据传输和共享. 这将便于遥感数据的汇总、处理、分析、管理和分享,不仅为遥感互联的建立提供了极大便利,也为商业遥感提供了一种新模式. Android 操作系统提供了应用程序编程接口(application programming interface,API)以支持顶层软件访问硬件平台,满足各类用户自主开发应用程序的需求. 这也为基于智能手机的遥感应用提供了遥感产品或应用软件开发的便利,降低了遥感产品开发成本. 尽管智能手机的工业化水平高,但是普通智能手机的野外生存能力较弱,野外的长期稳定性有待评估.
5 结 论
随着智能手机的普及,基于其应用的研究越来越多. 2016 年,谷歌公司公开了Android 操作系统GNSS 原始数据的访问接口. 基于智能手机的高精度导航服务已被广泛研究. 本文基于Android 操作系统的API 接口提取了智能手机的GNSS 数据,试验地论证了海面高度测量的可行性,并通过和测绘接收机测量值、验潮站同比数据对比初步评估了其性能.
(1)本文利用了经验模态分解提取了和海面反射信号相关的SNR 振荡特征. 仿真和实测结果表明经验模态分解可有效提纯海面反射信号的干涉振荡特征,降低海面高度测量误差.
(2)低成本GNSS 天线和接收机可提供和测绘接收机相同水平的海面高度测量性能. 当风速小于15 m/s 时智能手机的海面高度测量结果和验潮站同比数据具有良好的一致性,均方根误差和测绘接收机测量结果相同,为0.31 m.
(3)相比于已有文献中GPS 单系统CORS 站,在相同的观测周期内智能手机具有更多的测量样本.在18 天的试验时间内,共计采集1 120 个海面高度测量值,平均62 个/d,2.6 个/h.
(4)智能手机的成本远低于CORS 站成本,将为有助于广泛部署海面高度测量站构建观测网.
由于试验场景远离海岸,海况复杂多变,架设高度较高,且存在周围非探测区域反射信号的干扰,其海面高度测量精度较已有文献中CORS 站的测量精度低. 从物理隔离、信息特征提取算法等方面消除智能手机周围非观测区域反射信号的干扰将是提高海面测量精度的有效方法. 后续作者将继续研究智能手机的海面高度测量,提高其测量精度. 鉴于GNSSI/MR 技术已被广泛应用于土壤湿度、植被和雪厚等的探测,以及线极化信号的优势. 后续也将开展一系列论证试验,并对比评估智能手机探测上述地表参数的性能. 此外,作者团队也在积极开发智能手机海面高度测量的Android App,构建集采集、显示、传输、存储及管理一体化的海面高度测量系统.
猜你喜欢
中国农业信息(2023年3期)2023-03-18 08:19:04
作文新天地(小学版)(2022年8期)2022-05-30 04:30:04
中国农业信息(2021年3期)2021-11-22 06:44:48
红蜻蜓·低年级(2021年2期)2021-07-20 04:48:09
小学科学(2020年6期)2020-06-22 13:13:41
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
小学生导刊(2017年18期)2017-05-17 05:44:37
电子制作(2016年15期)2017-01-15 13:39:08
电子制作(2016年1期)2016-11-07 08:42:41