基于浮标信号增强和动态探测污水管定位方法的探讨
2023-01-30 13:09李兵张海荣梁苗
城市勘测 2022年6期
李兵,张海荣,梁苗
(1.徐州市勘察测绘研究院有限公司,江苏 徐州 221000; 2.中国矿业大学,江苏 徐州 221116)
1 引 言
污水管道用于城市污水排放,是重要的市政基础设施之一。检测、维护老化的污水管道或在污水管道周边建设地下工程时,需要首先查清污水管道的平面位置、埋深和走向。然而现实中部分污水管深度较深、井口小、井脖长、井室大、井内污水浑浊且充满垃圾漂浮物,给探测带来了相当大的难度[1]。
《城市地下管线探测技术规程》对超大埋深的污水井管口深度测量未明确按照明显管线点精度或是隐蔽管线点精度来判定。与此同时,目前行业内使用常规探测手段亦无法有效探明此类管线,精度要求无从谈起。目前,污水管道的定位方法主要包括量杆测量、L尺测量、管道CCTV检测设备测量、地质雷达测量等。各种方法优缺点如下:
(1)量杆测量。优点是操作简单、效率高。缺点是测量排水管时,需要倾斜量杆,测量的深度数据是斜距,并不准确,或者当大埋深污水井的井室比较大时,量杆无法触碰到污水管的管口,无法测量。
(2)L尺测量。优点是操作简单、数据相对准确。相比于量杆测量,L尺可以碰触到污水管的管口,测量结果更准确。缺点是当大埋深污水井的井室比较大时,L尺无法触碰到污水管的管口,无法测量。
(3)管道CCTV检测设备测量。该方法将检测机器人放入污水管道内,通过遥控装置操作或者计算机自动控制,进行管道检查工作[2]。管道潜望镜视频检测仪采用伸缩杆将摄像机送到被监测井内,对各种复杂的管道情况进行视频判断。工作人员对控制系统进行镜头聚焦、照明控制等操作,可通过控制器观察管道内实际情况并进行录像,从而出具管道的各种检测报告,甚至可以确定管道内的破坏程度。缺点是:①探测成本高、适用性差,例如CCTV检测设备工作前,必须将管道内积水进行抽取,部分污水管不具备抽水的条件,从而无法使用此方法;②自走车在管道内存留石块或混凝土残料的情况下容易侧翻。
(4)地质雷达测量。地质雷达从地表发射高频脉冲电磁波,电磁波遇到污水管产生反射电磁波,再由地表进行接收,获得电磁波在地下介质中的双程走时、波幅及其他电磁波特征,进而确定目标管的平面位置和深度[3,4]。地质雷达优点是可对井室外污水管进行定位,缺点是:①部分污水管材质老旧,由于分子存在相互运动,污水管材的介电常数与周围介质的介电常数差异小,电磁波不能产生有效反射,从而无法测量[5,6];②对于深度 6 m~12 m的大埋深污水管,反射电磁波能量弱,在各种电磁干扰和围岩反射电磁波的背景场中很难判别目标污水管[7]。
2 基于浮标信号增强和动态探测的污水管定位方法
针对上述常规技术存在的问题,研究了一种基于浮标信号增强和动态探测的污水管定位装置,有可能对井室外污水管的有效定位和测深提供技术支撑。
2.1 污水管定位装置的组成
基于浮标信号增强和动态探测的污水管定位装置(如图1所示)包括量杆,用于置放浮标的浮标卷,以及置于地面上的地质雷达。

图1 基于浮标信号增强和动态探测的污水管定位装置示意图
如图1所示,本基于浮标信号增强和动态探测的污水管定位装置包括量杆,用于置放浮标的浮标卷,以及置于地面上的地质雷达。
量杆为长度相等的多节量杆,两两量杆之间通过螺纹连接构成,每节量杆上均刻有刻度。顶部首节量杆上设有指南针和水平气泡,末节量杆底部为尖头结构,且设有用于对浮标卷的浮绳进行导向的滑轮,滑轮的位置可上下调整。
浮标为多节包覆在浮绳上的铁片或铜片。浮标每 50 m~100 m呈一卷,浮标卷之间通过连接扣连接。
地质雷达为普遍用于管线探测的地质雷达,天线频率约 80 MHz,具有增益等功能,可根据目标管口深度进行调节增益,屏蔽干扰信号,接收金属浮标反射的电磁波信号。
2.2 工作原理
基于浮标信号增强和动态探测的污水管定位装置利用了污水管道内污水处于流淌状态(城市污水提升泵站和污水处理厂的正常运作即证明了污水处于流动状态)的特点,流水将金属浮标卷冲进下游管道,增强目标体与周围介质的物性差异,从而可被地面接收机接收到电磁信号。通过放入浮标与无浮标情况下的反射波剖面图进行对比,确定排水管线的位置和深度;逐步增加浮标长度后得到多副反射波剖面图,通过对比多副反射波剖面图,确定排水管线的走向。
2.3 工作步骤
(1)根据井口周围有效作业半径选择足够数量的浮标卷,浮标卷总长度要大于有效作业半径。有效作业半径为本井室到下一井室之间的距离。
(2)根据污水井的井底深度,确定需要的量杆根数,并将其连接,确保量杆总长度大于井底深度,确保首节杆位于最上方。
(3)将量杆置于井室底,测量井底淤泥深度。
(4)取出量杆,将滑轮调至淤泥深度上方,以防止滑轮进入淤泥,阻碍滑动。
(5)将浮标一端置于量杆的滑轮上,将量杆和浮标一同放入井室底。
(6)在地面放浮标,浮标沿滑轮随水流进入下游污水管道,进入污水管道的浮标长度为 12 m。
(7)以污水井为中心,以10 m为半径,采用地质雷达进行环形探测,对采集的数据进行数据处理,得到有浮标情况下的反射波剖面图。
(8)进行动态探测,将浮标回收12 m,重复步骤(7),得到无浮标情况下的反射波剖面图。
(9)对比步骤(7)和步骤(8)的反射波剖面图,反射波信号增强位置即为污水管位置,在地面标出污水管位置,并获得污水管道内水面至地表的深度。
(10)在地面放浮标,放浮标长度在上一次基础上增加 10 m。
(11)以步骤(9)新标出的污水管位置为中心,以 10 m为半径,采用地质雷达进行环形探测,对采集的数据进行数据处理,得到有浮标情况下的反射波剖面图。
(12)进行动态探测,将浮标回收 10 m,重复步骤(11),得到无浮标情况下的反射波剖面图。
(13)对比步骤(11)和步骤(12)的反射波剖面图,反射波信号增强位置即为污水管位置,在地面标出污水管位置。
(14)重复步骤(10)、步骤(11)、步骤(12)和步骤(13),直至测量完毕。
2.4 技术特点
与常规探测技术相比,本基于浮标信号增强和动态探测的污水管定位装置的有益效果如下:
(1)相比量杆测量方法和L尺测量方法,此方法不受井口小、井脖长、井室大、井内污水浑浊且充满垃圾漂浮物等条件限制,还可以对井室外污水管进行定位、测深(管道内水面至地表深度)。
(2)相比管道CCTV检测设备测量方法,不需要对污水管进行预先抽水,适用性更好。
(3)相比常规地质雷达方法,通过金属浮标和动态探测增强污水管信号,提高了地质雷达对目标体的探测能力,提高了探测深度,从而有可能实现对老化污水管和大埋深污水管的有效定位。
(4)相比常规的反射波剖面图,不需要对异常进行精确判读,通过对比是否放入金属浮标的两张剖面图,不同的地方即为目标管线,更容易判别。
3 现场试验
现实中,大埋深的污水井溢满水,无法下井,且缺少合适的金属浮标做实验。为达到实验效果,将目标管线深度变浅,目标管线管径同比例缩小,地质雷达天线频率相对应提高。选取了徐州市新城区的一段新敷设的排管做实验(如图2所示),管井的深度约 1.5 m,管径为 80 mm,材质为PE,用多节不锈钢排水杆代替金属浮标,地质雷达天线频率采用 160 MHz。
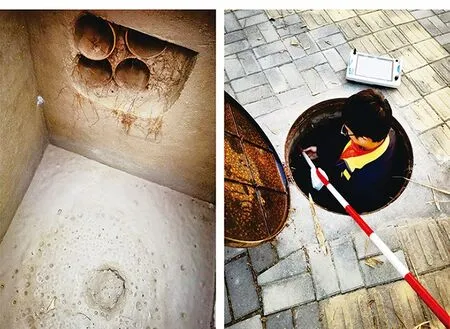
图2 实验现场图
使用地质雷达对检查井周圈进行探测,如图3所示。
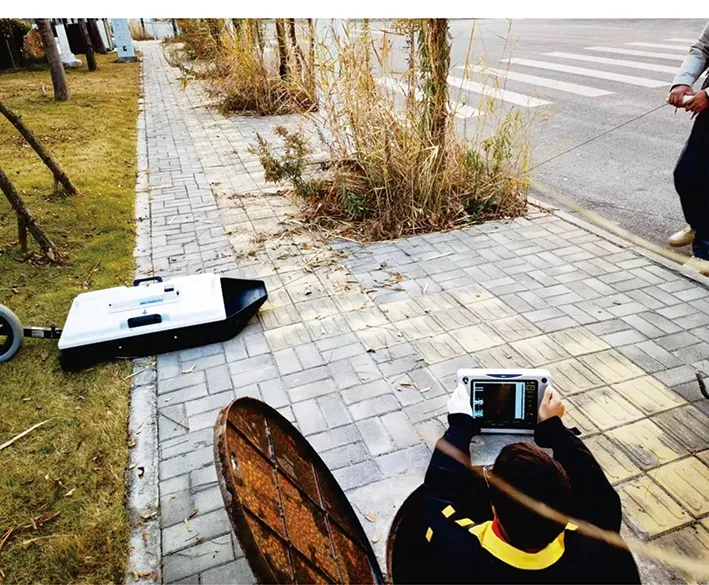
图3 地质雷达探测图
目标排管内未放置金属排水杆时,地质雷达接收机获得了反射波剖面图(如图4所示),目标排管内放置金属排水杆后,地质雷达接收机获得了反射波剖面图(如图5所示)。

图4 未放置金属杆的反射波剖面图
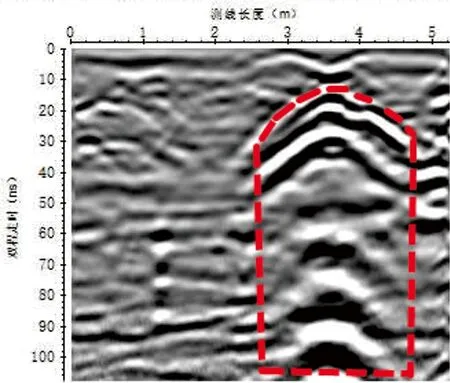
图5 放置金属杆的反射波剖面图
通过判别,图4在测线3.6 m处出现异常,可能为目标排管或是其他异常干扰。本文讨论的方法是不需要判别,只需对比两幅图的不同即可判定目标管线。通过与图4对比,图5在测线 3.6 m处呈现出来的是强导电体反射电磁波的震荡信号。经量测,数据与实地排管平面位置、深度、走向相同。需要说明的是,图5出现了金属杆的反射电磁波震荡信号,实验效果比较理想,反之,若不出现震荡信号,只要是两幅剖面图中明显不一样的图形所对应的平面位置即为目标管线所在处,判别相对简单。
4 结 论
本文探讨的基于浮标信号增强和动态探测的污水管定位方法利用污水处于流淌状态的特性,流水将金属浮标卷冲进下游管道,增大目标体与周围介质的物性差异,通过放入浮标与无浮标情况下的反射波剖面图进行对比,从而更容易确定排水管线的平面位置和深度。在对大埋深、管道内污水较满等排水管线进行探测时,此方法有可能进一步辅助提高污水探测的精度。
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
西部资源(2019年2期)2019-11-12
动漫星空(兴趣百科)(2019年11期)2019-11-05
垂钓(2019年2期)2019-09-10
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07