一种基于侧向干扰的雷达对抗无人机直线平行航线
2023-01-30 14:10:44王耀北汤亚波袁西超
航天电子对抗 2022年6期
王耀北,汤亚波,袁西超
(国防科技大学,安徽 合肥 230000)
0 引言
陆航直升机是重要的空中突击力量,但其自卫能力有限,作战中陆航直升机可采用雷达对抗无人机对敌防空系统雷达实施有效压制,协同完成突防行动。
雷达对抗无人机掩护航线是影响陆航直升机突防的关键。为此本文从全程有效掩护陆航直升机突防、无人机任务规划和准确操控需求出发,研究一种雷达对抗无人机直线平行航线,有助于提升陆航直升机协同突防能力。
1 雷达对抗无人机侧向干扰辐射空域
机载干扰天线的辐射空域是制约雷达对抗无人机作战运用的重要因素。受其特性影响,雷达对抗无人机常采用侧向干扰方式对敌雷达实施干扰,即其干扰信号的辐射空域覆盖范围主要集中在机身两侧。
图1为雷达对抗无人机侧向干扰辐射空域示意图,可以看出其干扰辐射空域主要沿机身横轴方向对称分布,且水平方向内干扰天线的辐射空域角度范围(干扰天线主瓣波束宽度)为2β0。作战中,雷达对抗无人机只有将敌方雷达纳入其位于侧向的2β0干扰辐射角度范围内,才能取得较好的干扰效果。
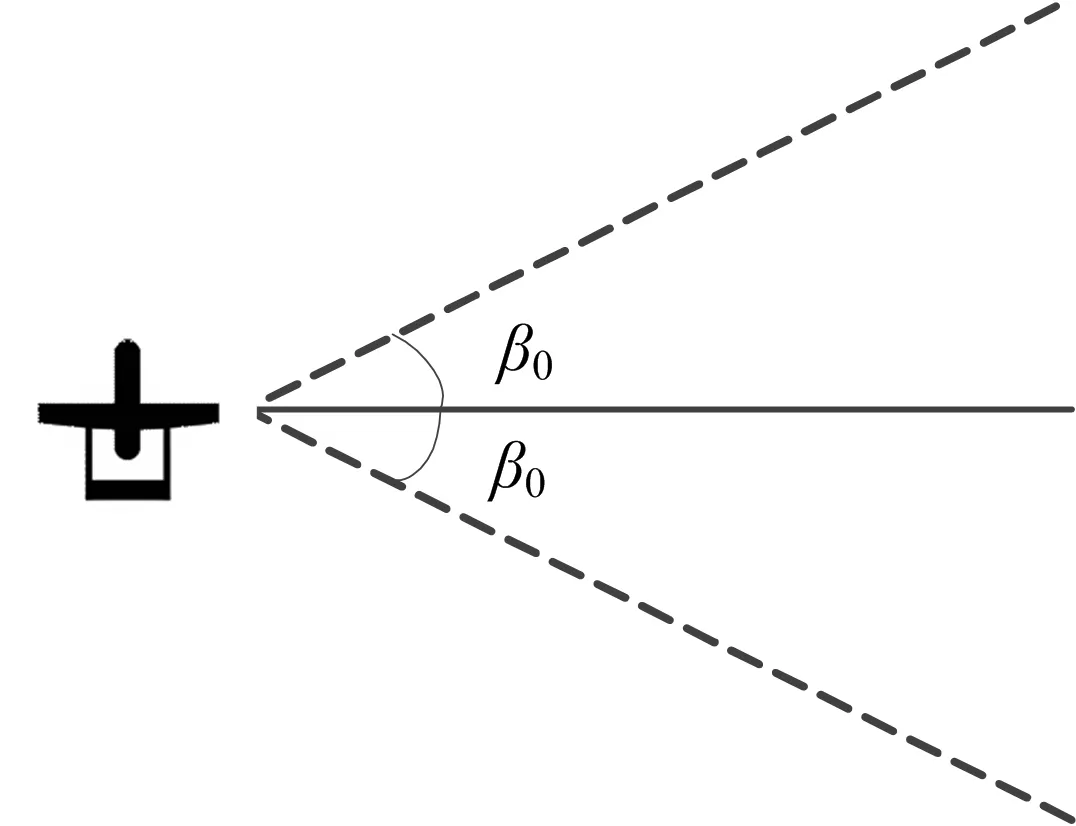
图1 雷达对抗无人机侧向干扰辐射空域示意图
2 雷达对抗无人机直线平行航线及设定
掩护陆航直升机突防时,雷达对抗无人机可采用直线平行航线。图2为雷达对抗无人机直线平行航线示意图。图中,敌方防空系统的武器控制雷达位于R点,扇形RAHB为敌方防空系统相对于陆航直升机的杀伤威胁区域,点H为陆航直升机飞行航线与敌方防空系统杀伤威胁区域的交点,也是陆航直升机突防航线的起点。RH为敌方防空系统最大杀伤半径。显然,当陆航直升机从H点进入以R为圆心、RH为半径的扇形区域RAHB内,就可能被敌方雷达探测并遭到敌防空系统的直接毁伤。M点为陆航直升机拟到达的位于敌方威胁区域RAHB内的目标点。
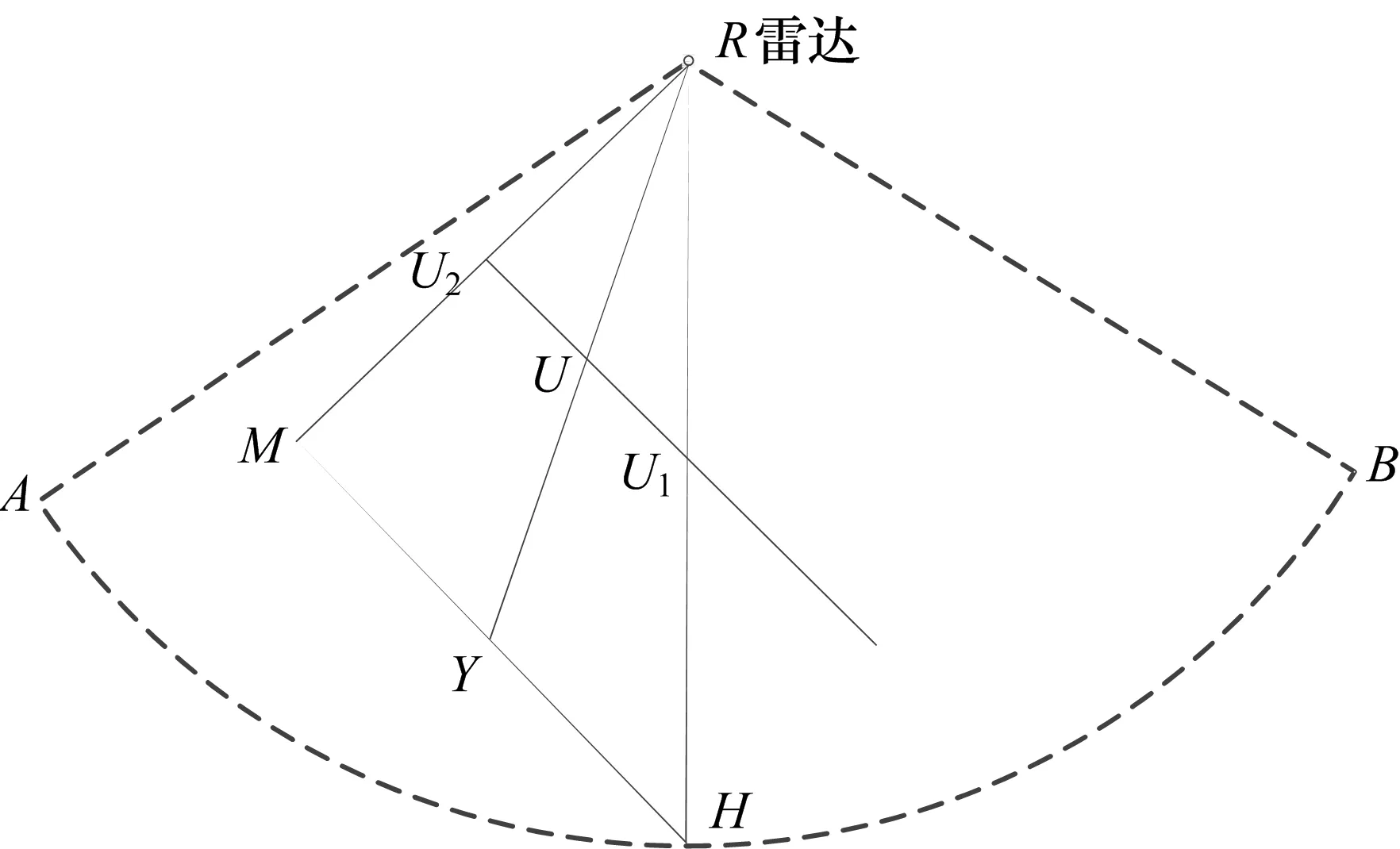
图2 雷达对抗无人机直线平行航线示意图
假定陆航直升机沿直线航路突防,即线段HM为陆航直升机的突防航线。图2中,U1U2为雷达对抗无人机掩护航线,U1、U2分别为掩护航线的起点和终点,U1和R、H共线,U2和R、M共线。这样,本文所述的雷达对抗无人机直线平行航线U1U2可描述为:

即雷达对抗无人机规划后的掩护航线U1U2与陆军航空兵突防航线HM平行。且要求U1U2的航线长度dUU与HM的航线长度dHM成正比,满足:

式中,Vuav、VH分别为无人机飞行速度和陆航直升机的飞行速度。这样,当陆航直升机突防航线规划时H点和M点确定后,结合式(1)和式(2),就可以规划出雷达对抗无人机的直线平行航线U1U2。
图2中,令R坐 标 为(XR,YR),M点 坐 标 为(XM,YM),H点坐标为(XH,YH)。则雷达对抗无人机直线平行航线U1U2的起始点U1和终止点U2的坐标位置分别为:

3 雷达对抗无人机直线平行航线分析
3.1 持续掩护突防时间
假定0时刻雷达对抗无人机和陆航直升机分别从U1和H点出发,沿各自航线飞行后,经过t0时间,它们将能够同时分别到达U2和M点。t0即为持续掩护突防时间,且由式(1)有:

3.2 全程雷达对抗主瓣干扰条件
全程雷达对抗主瓣干扰条件是指,在掩护过程中,敌方雷达、被掩护的陆航直升机和雷达对抗无人机始终位于同一条直线上,即满足“三点一线”的主瓣干扰条件。此时,雷达天线主瓣不仅接收被掩护陆航直升机的回波信号,而且接收雷达对抗无人机发射的干扰信号。主瓣干扰对于发挥雷达对抗无人机的干扰效能非常重要。
假定0时刻陆航直升机和雷达对抗无人机分别位于H点和U1点,t时刻二者分别达到图2中的Y点与U点,二者的飞行距离分别为VHt和Vuavt,结合式(1)、式(2),以及ΔRU1U和ΔRHY的相似关系,可以证明,R点、U点与Y点共线。也就是说,采用直线平行航线飞行,任意时刻敌方雷达、雷达对抗无人机和陆航直升机都能保持“三点一线”,满足全程雷达对抗主瓣干扰要求。
令U点坐标为(XU,YU),根据式(4)、(5),可得t时刻点U的坐标为:

令θ为雷达对抗无人机干扰方向与雷达天线主瓣辐射(接收)方向之间的夹角,Gt(θ)为雷达天线在干扰方向上的增益,Gt为雷达天线在主瓣方向的增益。对于雷达对抗无人机直线平行航线,由于各时刻满足θ=0,可有:

3.3 全程干扰覆盖空域条件
全程干扰覆盖空域条件指的是,雷达对抗无人机采用侧向干扰方式,沿直线平行航线飞行,能够始终将敌雷达纳入其机载雷达干扰机的干扰覆盖空域范围内。
图3中,QU与雷达对抗无人机航线U1U2垂直,雷达对抗无人机采用侧向干扰,因此QU表示的是t时刻机载雷达干扰机的最大干扰辐射方向。由图3可以看出,各时刻敌方雷达所在的相对方位(即干扰方向)并不始终与无人机飞行方向相垂直,而是存在一定的角度偏差β。也就是说,采用侧向干扰时,各时刻雷达对抗无人机的干扰方向UR与其最大干扰辐射方向(2β0)的对称轴QU的角度偏差为β。
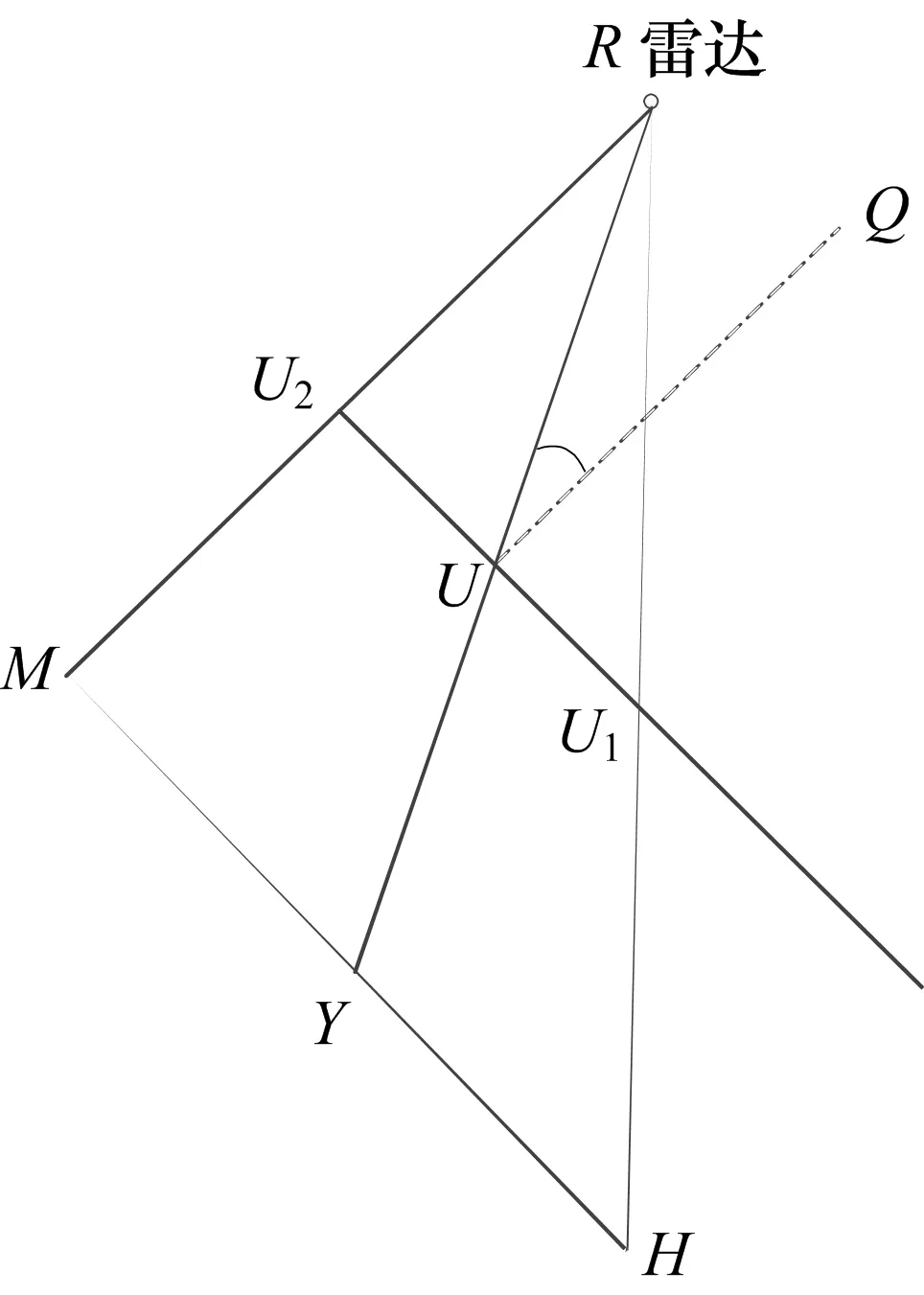
图3 采用直线平行航线时无人机干扰天线辐射方向与干扰方向
这样,雷达对抗无人机采用直线平行航线时应满足的全程干扰覆盖空域条件可表述为:

令R与U和U1之间的距离分别为dRU和dRU1,在ΔRU1U中,根据余弦定理可知:

从而,β=∠RUU1-π/2。
令Gj为雷达对抗无人机干扰天线主瓣增益,Gj(β)为干扰天线在干扰方向UR上的增益。当雷达对抗无人机直线平行航线U1U2满足式(8)要求时,有:

当雷达对抗无人机直线平行航线U1U2不满足式(8)要求时,可沿图2所示的扇形威胁区域RAHB的边缘重新设置H点,进行直线平行航线的调整,直到满足为止。
3.4 全程有效掩护距离条件
全程有效掩护距离条件指的是,雷达对抗无人机采用侧向干扰方式和直线平行航线,在满足全程雷达对抗主瓣干扰和全程干扰覆盖空域(即式(8))条件下,能够实现全程有效掩护还需要满足的掩护距离条件。
令Pt为雷达的发射功率,Pj为干扰机的发射功率,γj为干扰信号相对雷达天线的极化损耗,δ为突防直升机的雷达反射截面积,Kj为压制系数,Δfr和Δfj分别为雷达接收机和机载干扰信号的频带宽度。其他参数如前述。根据雷达干扰方程,在满足式(4)和式(5)条件下,可推导出:

式中,Rj(t)为t时刻雷达对抗无人机与雷达的距离,即t时刻的干扰距离;Rt0(t)为满足干扰方程条件下,t时刻陆航直升机与敌方雷达的距离,即t时刻的有效掩护距离。
显然,当PtGt等相关参数给定后,各时刻的有效掩护距离Rt0(t)将与各时刻的干扰距离Rj(t)的平方根成正比。若各时刻雷达与陆航直升机之间的实际距离Rt(t)均大于等于相应时刻的掩护距离Rt0(t),则可实现雷达对抗无人机对陆航直升机的突防行动的全程有效掩护。这样,全程有效掩护距离条件可表示为:

当雷达对抗无人机直线平行航线U1U2不满足式(12)要求时,也可沿图2扇形威胁区域RAHB的边缘重新设置H点,进而对直线平行航线实施调整,直到根据新设置的H点而形成的直线平行航线能够同时满足式(8)和式(12)为止。
4 基于侧向干扰的雷达对抗无人机直线平行航线规划方法
根据前述,提出如下的基于侧向干扰的雷达对抗无人机直线平行航线规划方法。主要步骤为:
步骤1:明确敌威胁雷达位置R、威胁半径和威胁区域,明确陆航直升机需要突防到达的点M坐标位置。
步骤2:根据威胁半径和威胁区域边界,确定陆航直升机的突防航线进入点H坐标,且点满足:

步骤3:根据第2节中描述和式(1)—(4),确定雷达对抗无人机直线平行航线U1U2。
步骤4:根据式(9),计算各时刻雷达对抗无人机的干扰方向与其最大干扰辐射方向的角度偏差β。若β满足式(10)则继续;否则转步骤2,沿威胁区域边缘重新确定航直升机的突防航线进入点H坐标。
步骤5:根据式(12),计算各时刻雷达对抗无人机的掩护距离Rt0(t)。若Rt0(t)满足式(12)则结束规划进程,输出规划结果;否则转步骤2,沿威胁区域边缘重新确定航直升机的突防航线进入点H坐标。
5 基于侧向干扰的雷达对抗无人机直线平行航线仿真
5.1 仿真条件
假设敌方防空系统火力威胁半径为70 km,其制导雷达位于坐标原点R(0,0),制导雷达波束宽度θ0.5为3°。陆航直升机的速度为300 km/h,雷达对抗无人机的速度为150 km/h,陆航直升机进入威胁区域的H点为(0,-70),预定要到达的目标点M(-50,-50)。雷达对抗无人机的最大干扰空域辐射范围2β0为90°,即β0为45°。
其它相关参数假定如下:敌方防空系统制导雷达等效辐射功率PtGt为10 kW,雷达对抗无人机机载干扰机等效辐射功率PjGj为500 W,干扰信号对雷达天线的极化损耗γj为0.5,陆航直升机的雷达反射截面积δ为10 m2,压制系数Kj为3.14,机载干扰信号和雷达接收机的频带宽度的比值Δfj/Δfr为2。
5.2 仿真结果
5.2.1 仿真确定的直线平行航线
根据仿真条件和式(1)—(4),可得如下结果:图4中,陆航直升机突防航线HM的长度为53.85 km,总突防时间为10.77 min(0.179 5 h)。雷达对抗无人机直线向心航线U1U2的长度为26.926 km,起始点U1坐标为(0,-35),终止点U2坐标为(-25,-25)。
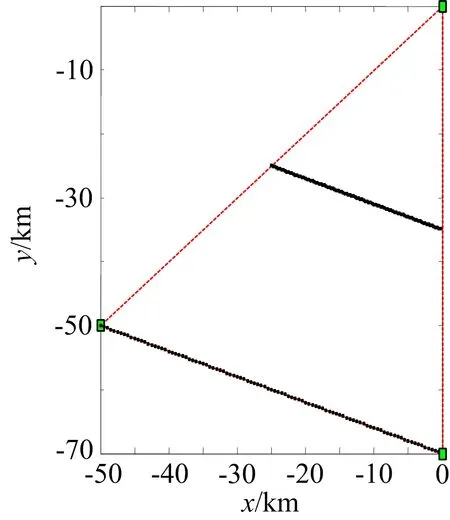
图4 直线平行航线仿真结果
5.2.2 全程干扰覆盖空域条件检查
根据仿真条件,仿真计算获得的雷达对抗无人机的干扰方向UR与其最大干扰辐射方向QU的角度偏差β,如图5所示。
由图5可以看出,雷达对抗无人机沿直线平行航线U1U2飞行。当0时刻无人机位于U1点时β最大,为23.198 6°。当10.77 min无 人机位于U2点 时β0最 小,为-21.801 4°,而根据仿真条件,β0为45°,各时刻β0均满足式(9)要求,即满足全程干扰覆盖空域条件。
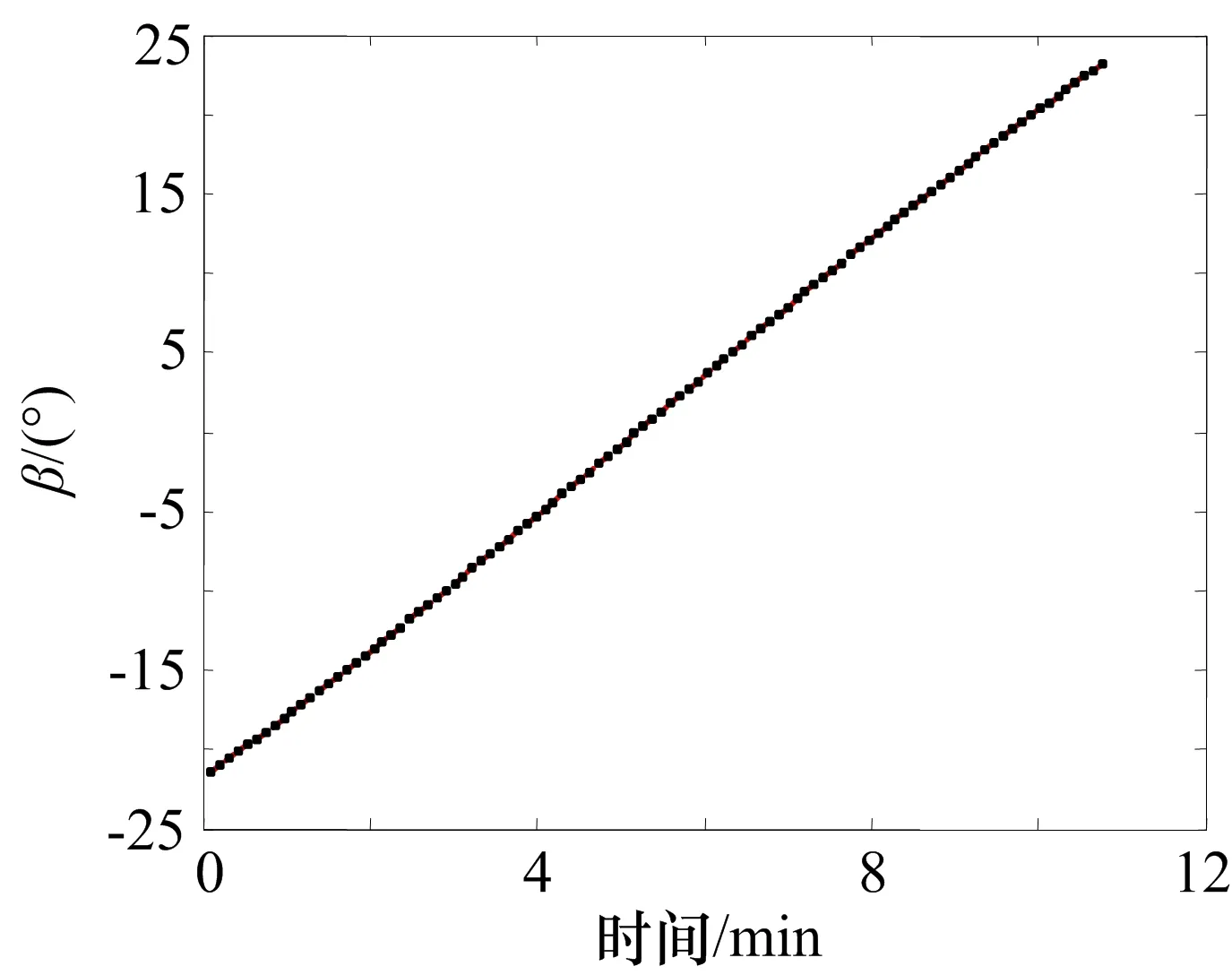
图5 各时刻无人机干扰方向与其最大干扰辐射方向的角度偏差β
5.2.3 全程有效掩护距离条件检查
根据仿真条件,图6给出了各时刻陆航直升机与雷达的实际距离(上方粗线条表示)和相应时刻的有效掩护距离(下方细线条表示)。可以看出各时刻陆航直升机与雷达的实际距离均在70 km附近。其中,0时刻陆航直升机位于H点时距离敌方雷达70 km,10.77 min陆航直升机位于M点时距离敌方雷达70.7 km。而仿真计算获得的各时刻雷达对抗无人机的有效掩护距离均在20 km以内,满足式(12)要求,即满足全程有效掩护距离条件。

图6 各时刻有效掩护距离和相应时刻的实际距离
因此,在给定仿真条件下,仿真示例规划的直线平行航线能够有效掩护陆航直升机突防。
6 结束语
本文从雷达干扰方程出发,研究了一种基于侧向干扰的雷达对抗无人机直线平行航线及其规划方法,对雷达对抗无人机作战运用具有一定的参考价值。为使研究成果能实际指导应用,后续工作包括:探讨直接计算突防进入点H的方法;并考虑无人机和被掩护直升机飞行速度存在一定误差的情况。
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28 07:02:46
思维与智慧·上半月(2022年4期)2022-04-08 21:24:29
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
小哥白尼(神奇星球)(2021年4期)2021-07-22 03:17:22
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
光学精密工程(2016年3期)2016-11-07 09:03:52
西南交通大学学报(2016年4期)2016-06-15 20:29:36
海峡科技与产业(2016年3期)2016-05-17 04:32:11
通信电源技术(2016年1期)2016-04-16 04:57:35
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:14