
基于C-V2X 的车路云协同系统架构及场景化部署方法研究
2023-01-27 11:50严炎
广东通信技术 2022年12期
[严炎]
1 引言
随着技术的不断演进,国内在政策、产业层面不断推进车联网逐步向成熟发展。2018 以来,工信部、发改委等有关部门陆续发布《车联网(智能网联汽车)产业发展行动计划》、《交通强国建设纲要》、《智能汽车创新发展战略》、《工业和信息化部关于推动5G 加快发展的通知》等文件,极大促进了C-V2X 产业发展。到2025 年,车用无线通信网络(LTE-V2X 等)实现区域覆盖,新一代车用无线通信网络(5G-V2X)在部分城市、高速公路逐步开展应用,智能化道路基础设施规划要结合5G 商用部署,推动5G 与车联网协同建设。C-V2X 技术将成为我国智能汽车发展的重要一环[1]。
各地在推动车路云协同系统建设,探索车联网应用的同时,也暴露出当前系统建设存在诸多需要改善的地方,例如路侧设施缺乏场景化建设标准,云端消息接口及架构尚未统一,网络安全认证体系需要完善等。本文首先简要回顾C-V2X 标准进展,然后给出车路云协同系统建设目标及标准化建设内容,提出基于C-V2X 的车路云协同总体架构,重点分析不同场景下系统设施部署的设计原则及方法,最后进行总结。
2 C-V2X 标准概述
C-V2X 标准的发展经历了3 个阶段,第一阶段支持LTE-V2X 的3GPP Release14 版本标准于2017 年3 月正式完成,引入了工作在5.9GHz 频段的直通链路(PC5 接口)通信方式[2];第二阶段支持LTE-V2X 增强(LTE-eV2X)的3GPP Release15 版本标准于2018 年6 月正式完成,主要在Release14 版本标准基础上针对直通链路引入了载波聚合、高阶调制等技术;第三阶段支持NR-V2X 的3GPP Release16 版本标准于2020 年7 月冻结,面向高级别自动驾驶等更先进的车联网业务(传感器共享、自动驾驶、远程驾驶、高级编队等),主要对于PC5 接口支持单播、组播和广播3 种模式,提供不同的业务能力。NR-V2X 将与LTE-V2X 形成互补关系并长期共存[3],共同为各类车联网业务提供无线通信支撑。国内标准方面,围绕互联互通和基础支撑,我国也已发布多项基于LTE-V2X 的车联网无线通信技术行业标准,涵盖接入层、网络层、消息层、安全等技术要求及测试方法。交通及公安标准部门也相继发布了《公路工程适应自动驾驶附属设施总体技术规范》和《道路交通信号控制机信息发布接口规范》等相关应用标准,促进车路云协同技术在汽车驾驶服务、交通基础设施以及交通管理方面的实际应用。
3 车路云协同系统建设目标及内容
基于C-V2X 的车路云协同系统以车联网应用开发和业务推广为目标,对城市部署区域内路侧设施进行数字化升级改造,依托通信网络、感知网络、定位网络提供基础车联网服务能力。在此基础上构建涵盖面向政府的交通管理、面向企业的V2X 基础服务、面向个人的多元出行服务等有机整合的综合服务平台,打通公安交警、互联网、车联网等数据,构建跨行业跨部门多源数据平台的互联互通,实现信息共享和数据交互,实现平台对外信息共享服务。
由此,车路云协同系统建设主要包括。
(1)路侧基础设施建设
包括摄像机、雷达、道路检测器、气象检测器等基础传感设备;融合感知单元,多接入边缘计算设备(Multiaccess Edge Computing,MEC);路侧单元(Road Side Unit,RSU),基站等路侧通信单元;电子屏,信号显示灯等交通诱导设备。同时还包括对现有道路的信号机改造。
(2)传输网络建设
包括路侧基础设施之间的网络连接,包括基础传输线路的建设改造及交换单元的部署。
(3)平台建设
平台建设根据车路云协同核心功能及配套功能,包括V2X 云控平台、运维平台、公钥基础设施(Public Key Infrastructure,PKI)系统等建设,以及平台部署规模及对应的计算,存储网络资源要求。
(4)终端选型
结合业务场景考虑终端能力和规模,包括应具备的应用功能以及装车形式的要求。
4 总体架构
基于C-V2X 的车路云协同整体系统逻辑上可以分为应用服务、感知网、定位网、通信网和终端五大功能,如图1 所示。
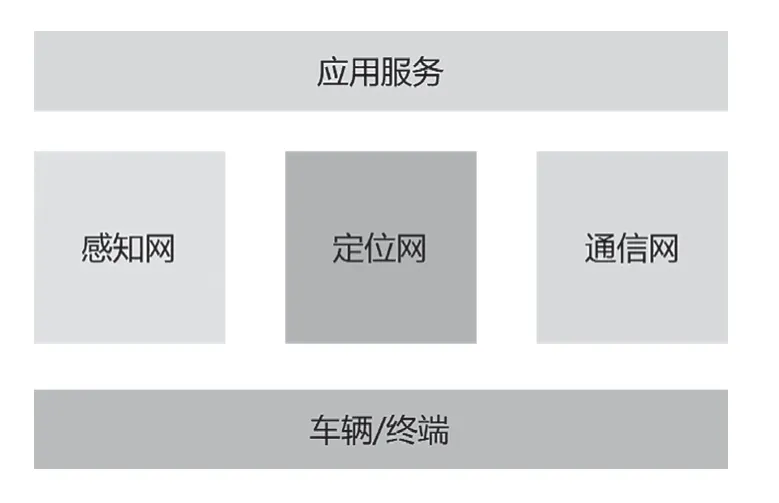
图1 车路云协同总体架构
其中感知网提供对道路目标,道路事件以及道路环境信息进行精准感知、检测及分类。定位网对道路目标物(自身及周边目标)进行高精度的定位。感知和定位基于实现方式的不同,可以作为一张网络存在,也可以作为独立两张网络存在,相互配合。通信网基于有线或无线的方式完成系统中各网元的信息交互,例如车车,车路,车云之间信息的可靠传输。应用服务集中提供车联网应用,根据部署单位,部署地域的不同存在多个层级。
结合实际部署情况,本文在总结各地实施经验,并确保方案在跨技术领域、跨系统集成、跨行业融合、跨平台开放等前提下,细化车路云协同系统实现架构如图2 所示。
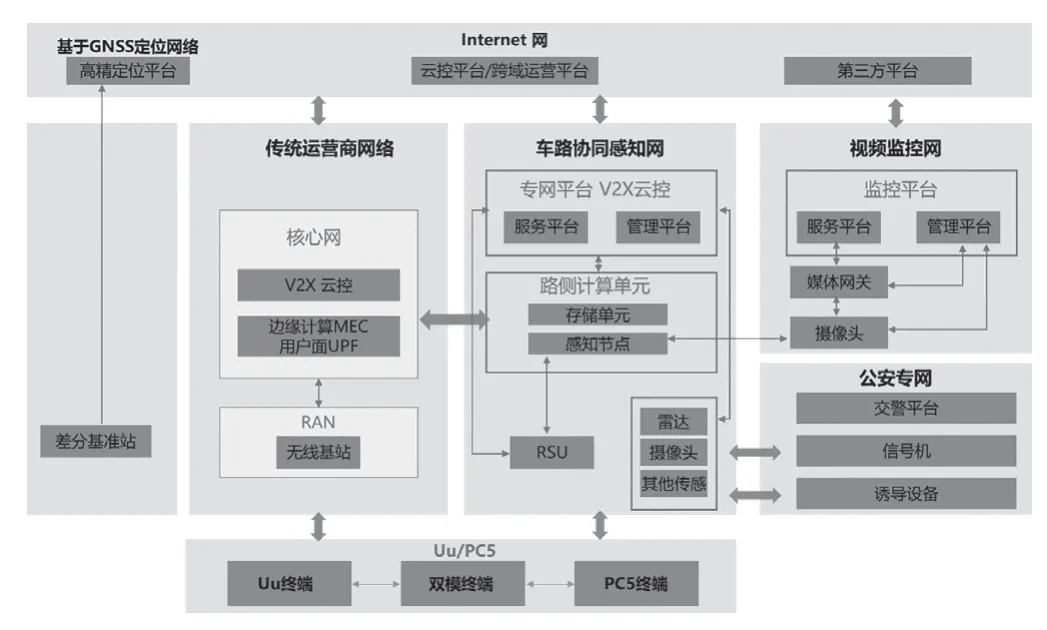
图2 车路云协同系统实现架构
实际部署时,新建场景由于建设运营方的不同,设备会归属于不同网络,部分场景可复用现有设备。例如RSU由运营商统一建设运营时隶属于运营商网络,由政府或行业运营方建设运营时则隶属于车路云协同专网。摄像机可以同已有视频监控网摄像机复用也可以进行独立部署。
5 基础设施部署
为满足车路云协同建设“两率一感”(“两率”即路侧设备及车载设备渗透率,“一感”即使用者获得感)的持续提升,路侧设施投资非常巨大。依据一定的部署设计标准有目标、有策略、有节奏进行路云基础设施的建设是需要重点考虑的因素。
云端设施基于云平台的架构,核心业务均部署在公有云或混合云平台上。云平台对全路段资源、数据、事件进行统一的运行监测,整体管控并可进行多区域联合管制、通知、协同作业。各区域可以依靠云平台的云服务能力进行业务场景定制化开发。
路侧设施主要包括移动通信云网和车路协同专网。移动通信云网用于通信和回传,车路协同专网感知网络用于感知路侧信息,并进行融合分析,通过RSU 给车辆广播。在获取公安交警授权情况下,可以对接交警信号机获取红绿灯信息,共用部分交警摄像机。
车载单元(On-Board Unit,OBU)可以采用前装、后装方式部署;前装OBU 连接车辆控制器局域网络(Controller Area Network,CAN)接口,能和车进行交互,同时连接车载中控显示,支持应用展示和提醒。后装OBU 可以采用后视镜、手机支架等多种方式和形态,方便推广,快速扩大用户规模。车载单元可以优先在行业(货运集卡、工程车等)、公共服务特种车辆(环卫车、公交车、出租车、警车、救护车等)部署,实现特种车辆管控和效率提升功能。
5.1 路侧通信感知设备部署
(1)十字路口部署
RSU 通信设备部署原则:如图3 所示,根据十字路口周围建筑物、植被等环境情况部署,建议采取如表1 所述的场景分类原则部署。

表1 不同场景十字路口RSU 部署原则
感知设备部署原则:如图3 所示,感知设备包括雷达(R)和摄像机(C),照射车尾方向,宜采用横杆延伸到道路中间安装。
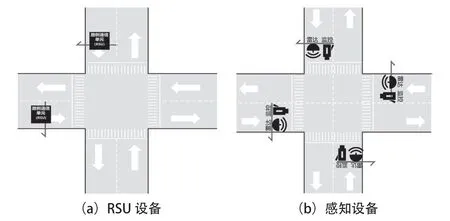
图3 十字路口设备部署示意
(2)丁字路口部署方案
RSU 通信设备部署原则:如图4 所示,无遮挡情况下,丁字路直道处部署1 个RSU,覆盖整个丁字路口。实际部署时,可以根据杆位情况调整,确保丁字路口各个方向无遮挡。
感知设备部署原则:如图4 所示,照射车尾方向,丁字路口共计4 个方向部署,宜采用横杆延伸到道路中间安装。
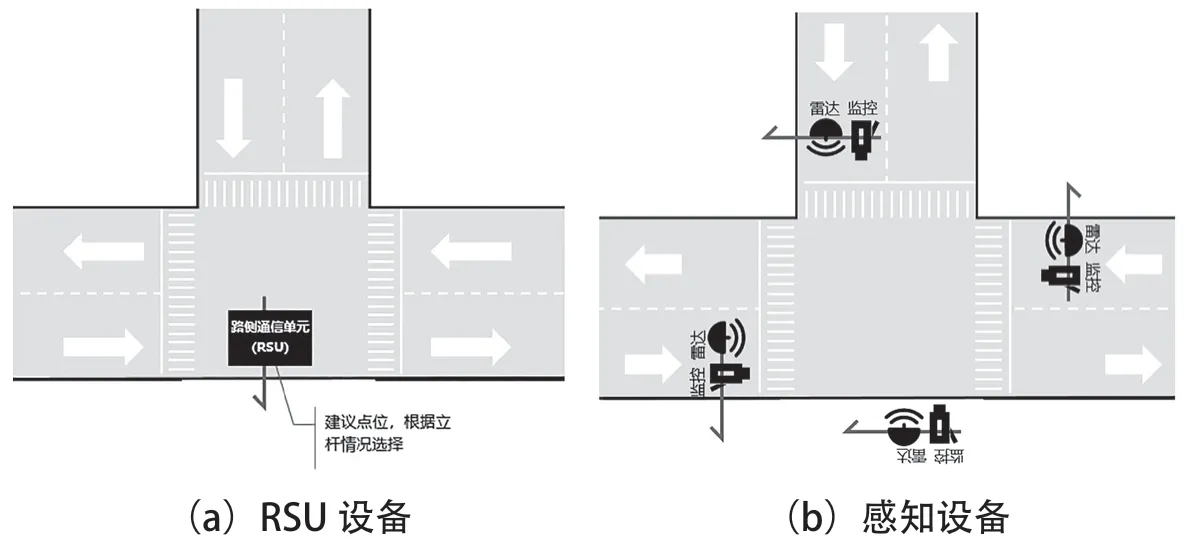
图4 丁字路口设备部署示意
(3)长直道路部署方案
RSU 通信设备部署原则:如图5 所示,根据渗透率和可靠性要求确定,部署间距200~800 m,采用抱杆安装。可根据道路遮挡情况和安装条件,确定在道路单边安装或者对向安装。在弯道、高架、桥梁等因遮挡问题导致信号覆盖不足(建议值:信号强度RSRP<-110 dBm)区域,需要单独规划RSU 补充覆盖。公路建设规划时,建议每200 m 左右预留路侧设施安装点位,便于后续加强覆盖。具体可参考表2 所述间距部署。
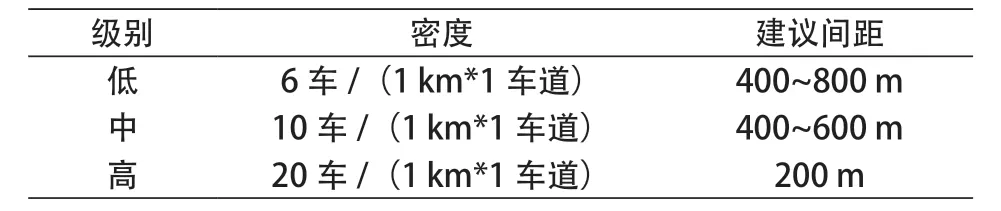
表2 长直道路RSU 部署间距
感知设备部署原则:如图5 所示,长直道路延伸方向,部分场景需要提前感知车辆信息,需在延伸道路上部署雷达和感知设备。城市道路路况复杂,雷达宜按照200 m 密集间距部署,摄像机根据其覆盖能力部署,一般按照100 m 间距部署。雷达和摄像机部署,延道路行驶方向,每个行驶方向单项部署,采用追打方式连续覆盖,照射车尾。
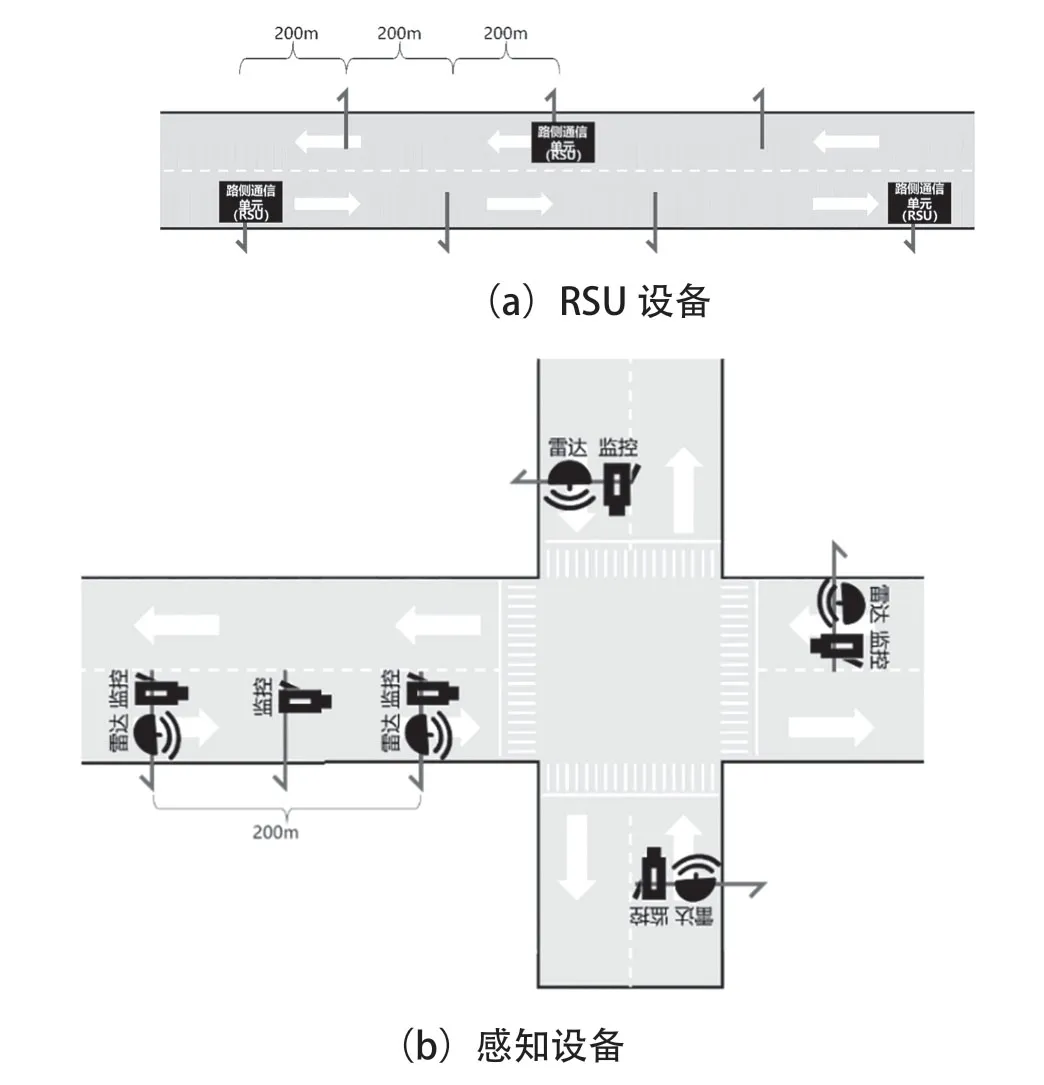
图5 长直道路设备部署示意
(4)环岛部署方案
RSU 通信设备部署原则:如图6 所示,根据环岛区域遮挡情况确定RSU 数量。如果环岛内无遮挡或存在高杆,则只需要部署1 个RSU。如果存在树木遮挡,则需要在每个路口方向部署1 个RSU。其他复杂环岛,如高架下环岛、6 路口等多个路口环岛,根据实际遮挡和安装条件情况调整数量和安装位置,确保RSU GPS 信号和覆盖信号无遮挡。同时确保相邻RSU 间无遮挡,且间距<800 m,否则需要增加RSU 部署。
感知设备部署原则:如图6 所示,按照道路行进方向部署雷达+摄像机,照射车尾方向,每条道路入口方向进行传感器部署,在无遮挡,且环岛较小的场景,可与十字路口使用相同部署方案。一般性中间带绿化的环岛部署,需要按照每个道路行进方向进行部署,同时,在环岛出口处需要与直行道路采用同样部署方案,如图6 所示。
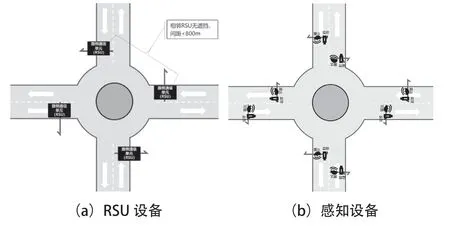
图6 环岛设备部署示意
(5)匝道路口部署方案
RSU 通信设备部署原则:如图7 所示,匝道一般无遮挡,交叉口部署1 个RSU,覆盖匝道口,确保匝道和主道汇入位置信号覆盖良好。可根据立杆情况和遮挡情况,适当调整部署位置。
感知设备部署原则:如图7 所示,按照道路行进方向部署雷达+摄像机,匝道感知设备部署位置距离匝道口100 m 左右,直到距离匝道口50 m。雷达摄像机覆盖匝道汇入车辆,照射车尾方向。

图7 匝道路口设备部署示意
(6)急转弯等部署方案
RSU 通信设备部署原则:如图8 所示,转弯路口部署1 个RSU,覆盖整个弯道。
感知设备部署原则:如图8 所示,每个路段使用1 台雷达+1 台摄像机,距离路口100 m。弯道2 条路段,共计2 台雷达+2 台摄像机,检测为车尾方向。
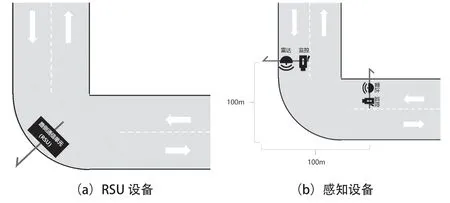
图8 弯道设备部署示意
5.2 融合感知计算节点部署
路侧融合感知计算单元根据设备选型和算力情况在路口配置,融合感知设备AI 算力需要具备扩展能力。
(1)在低于8R+8C 以下的场景,建议以低性能紧凑型融合感知节点进行部署。
(2)对于大于8R+8C 的场景建议使用大算力设备集中处理。
(3)根据算力和传输条件不同,1~2 个路口部署1个融合感知计算单元。
(4)宜就近安装到路边空调机柜中或部署到机房。
5.3 传输部署
传输设备部署优先考虑车路协同,同时兼顾安全驾驶场景,部署原则如下。
(1)RSU、融合感知节点、各类传感器(摄像机、气象仪器)等设备之间通过本地交换机完成站点组网,多个站点通过汇聚交换机或路由器组成光纤环网。光纤环网通过路由器与云平台连接,例如V2X 云控、运维平台、安全平台等。
(2)RSU 和运维平台,安全平台之间的数据传输小,对传输带宽的需求可忽略。RSU 和V2X 云控之间需要传输大量应用消息,传输部署时,需要满足对传输带宽的需求。
(3)RSU 向V2X 云控发送消息时,单个RSU 对传输带宽的需求:RSU 连接V2X 云控的上行带宽需求约10 Mbit/s。
注意以上涉及RSU 的带宽估算仅限支持DAY I[4]、DAY II[5]应用场景的RSU。
5.4 云平台部署
如图9 所示,云平台建设宜采用分层建设方式,建设部级(根CA 中心)、省级(综合平台负责监管和呈现、显示区域状态、比如车辆数、事故数等;中间证书机构;图商地图平台;运维监控中心等)、地市级(负责具体车路协同应用和业务)云服务平台。
部署原则如下:(1)地市给省中心上报北向数据,包括业务北向和运维北向数据。业务北向数据提供地市交通统计、监管统计、事故统计等数据,由省中心汇总,集中管理和展示交通情况。运维北向数据上报设备数量、设备状态等信息,由省中心对网络设备集中管理。
(2)按照公里数和数据计算量购买服务器资源和计算资源。可使用公有云或者私有云服务。
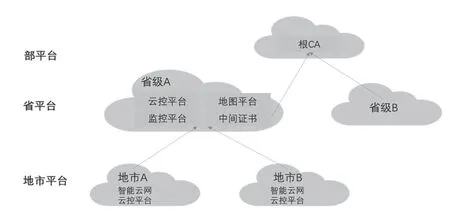
图9 云平台分层分级架构
6 小结
基于C-V2X 的车路云协同系统是实现自动驾驶、智慧交管、智慧出行服务等应用的关键技术之一,与国外发展单车智能的方向不同,我国发展智能交通的技术路线为基于车路协同的“单车智能+网联赋能”。截止2021 年,国内实现通车的公路里程达到519 万公里(含16 万公里的高速),如何通过规划、设计实践积累,做好车路云协同建设规范和指南,是未来大规模推广车联网建设实施的关键任务之一。本文所提的基础设施部署方法按照道路的基本形态进行场景划分,所给出的部署参数、间隔范围等建议较为宽泛。随着更多的实践经验积累、系统仿真优化和业务需求驱动,探索基于服务需求、更多道路环境因素考量的场景化建设标准将是下一步主要工作。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
今日农业(2021年7期)2021-07-28
非公有制企业党建(2020年5期)2020-06-16
汽车观察(2019年2期)2019-03-15
中国交通信息化(2018年12期)2018-03-21
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
太空探索(2016年9期)2016-07-12
新闻前哨(2015年2期)2015-03-11
数码(2009年3期)2009-03-16
