融合机载和背包激光雷达的桉树单木因子估测
2023-01-18 09:07张信杰郑焰锋温坤剑王鹏杰吴发云
林业资源管理 2022年6期
张信杰,郑焰锋,温坤剑,王鹏杰,吴发云
(1.国家林业和草原局林草调查规划院,北京 100714;2.国家林业和草原局中南调查规划院,长沙 410014)
机载激光雷达(Airborne Laser Scanning,ALS)在森林中的测量,基本原理是通过传感器发出的脉冲与植被反射光之间的时间,来确定传感器与植被之间的距离,从而测量森林的垂直结构[1]。相较于成像光谱和成像雷达,激光雷达对森林冠层的穿透性强,不受天气的限制,可获取林分冠层精细三维结构以及林下地形情况[2]。近多年来多项研究证实,通过ALS获取的点云数据可有效反演高度、胸径、树冠面积、蓄积量和单木位置等基本森林参数[3-4]。曾伟生等[5]利用ALS提取出的点云森林参数,通过多元线性回归和非线性回归方法,建立东北林区10种森林类型的航空林分材积表;孙忠秋等[6]利用ALS提取出的点云森林参数与实际样地数据构建估测随机森林模型,对东北虎豹国家公园森林蓄积量进行了估测研究;周蓉等[7]采用BP神经网络算法、逐步回归法分别构建林分算术平均高模型和林分加权平均高模型,实现对东北虎豹国家公园范围内的针叶纯林林分平均高的估测;黄侃等[8]结合ALS数据、高空间分辨率影像提出一种对山区复杂地表进行分类的方法,并验证了该方法对林区的分类精度。然而,对于高郁闭度或高树高的森林林分而言,ALS对其冠层下部数据获取能力依旧有限[9]。
背包式 LiDAR(Backpack Laser scanning,BLS)是近年新发起的集成了定位与制图构建 SLAM(Simultaneous Localization And Mapping)技术的点云数据获取设备,携带和操作都比较简便,较好地解决了天气、地形和卫星导航等外界环境因素约束,采集的点云密度大能精细刻画目标三维形状[10]。Xie等[11]的研究结果表明,在BLS点云的单株水平上,点云切片的垂直厚度为30cm最适合于胸径估计,与手动测量相比,R2为0.89,且从BLS点云提取的胸径小于手动测量的胸径;黄旭等[12]利用背包式激光雷达扫描云杉林样地获取点云数据进行分割识别和单木胸径、树高及冠幅面积等因子估测,结果表明对针叶树树高、胸径和冠幅等参数的提取效果较好。尽管如此,BLS的应用仍处于早期阶段,其对不同立地条件和林分类型的林分测量精度和误差源尚未得到系统的探究[13]。
将不同的具有上下部冠层观测优势的激光雷达平台数据有效的结合起来,成为了激光雷达在林业应用上的待解决的新问题。本文以海南人工桉树林为研究对象,融合ALS和BLS点云数据,开发一种利用融合2种数据估算单木因子的方法,互补两者之间的硬件缺陷问题。目标包括:1)将BLS获取的胸径、树高与人工测量的胸径、树高的精度比较;2)融合ALS和TLS测量点云数据与人工测量树高的精度比较。本研究可为多平台激光雷达融合获取森林三维结构参数提供方法和应用参考。
1 研究区概况
研究区为海南省五指山市,地处海南岛中南部腹地,由于海拔高,纬度低,森林密布,光、热、水资源丰富。此地气候温和,属热带山区气候。年平均气温22.4℃,1月平均气温17℃,7月平均气温26℃,极端最高气温35.9℃。年平均降水量为1 690mm,极端最大年降水量为2 810.4mm,极端最少年降水量为1 055.5mm。年平均相对湿度为84%,森林覆盖率86.44%。研究区内人工桉树林分布广蓄积量大,蓄积可达300~500m3/hm2[14]。
2 研究方法
2.1 数据获取
机载激光雷达数据由机载小光斑激光雷达(NFGI Airborne Small-footprint LiDAR,NFGI-LIDAR-S)于2021年1月获取,经控制点处理后,其点云数据平面和高程精度分别优于0.5m和0.08m,植被分类正确率达到90%以上,平均点云密度大于8点/m2[15]。
背光激光雷达数据于2021年1月采用LiBackpack DG50设备于与机载激光雷达几乎同步采集。LiBackpack DG50设备包括水平和垂直2个激光雷达传感器,配置高精度GNSS设备,获取扫描范围内激光点数据,通过后期解算处理得到高精度的激光点云数据。其系统参数如表1所示。以不同高度级和郁闭度的为选取依据,选取 4个半径为15m的圆形样地进行背包雷达数据采集,林分具体信息如表2所示。针对15m的圆形样地,考虑树木分布比较密集,采用S形路径规划。

表1 背包式激光雷达扫描系统参数Tab.1 Backpack LiDAR scanning system parameters
2.2 处理流程
样地的背包激光雷达点云首先进行去噪、滤波、地面点和植被点提取、点云归一化等预处理,在预处理的基础上再进行单木分割处理、胸径拟合和单木参数提取。融合背包激光雷达和机载激光雷达的单木因子估测流程:首先背包激光雷达去噪重采样等预处理、机载激光雷达异常点去除等预处理,在两者预处理的基础上进行点云匹配,再进行点云分类、归一化,最后进行单木分割和单木参数提取,具体流程如图1所示。融合背包激光雷达和机载激光雷达的单木因子估测主要处理步骤的数据包括:机载激光雷达点云数据、背包激光雷达点云数据、粗配准后点云、ICP精配准点云剖面、样地单木分割结果、DBH拟合等,具体如图2所示。

表2 样地林分具体信息情况Tab.2 Specific information on the sample site stands

图1 融合背包激光雷达和机载激光雷达的单木因子估测流程图Fig.1 Flow chart for single tree factor estimation with merging backpack and airborne LiDAR
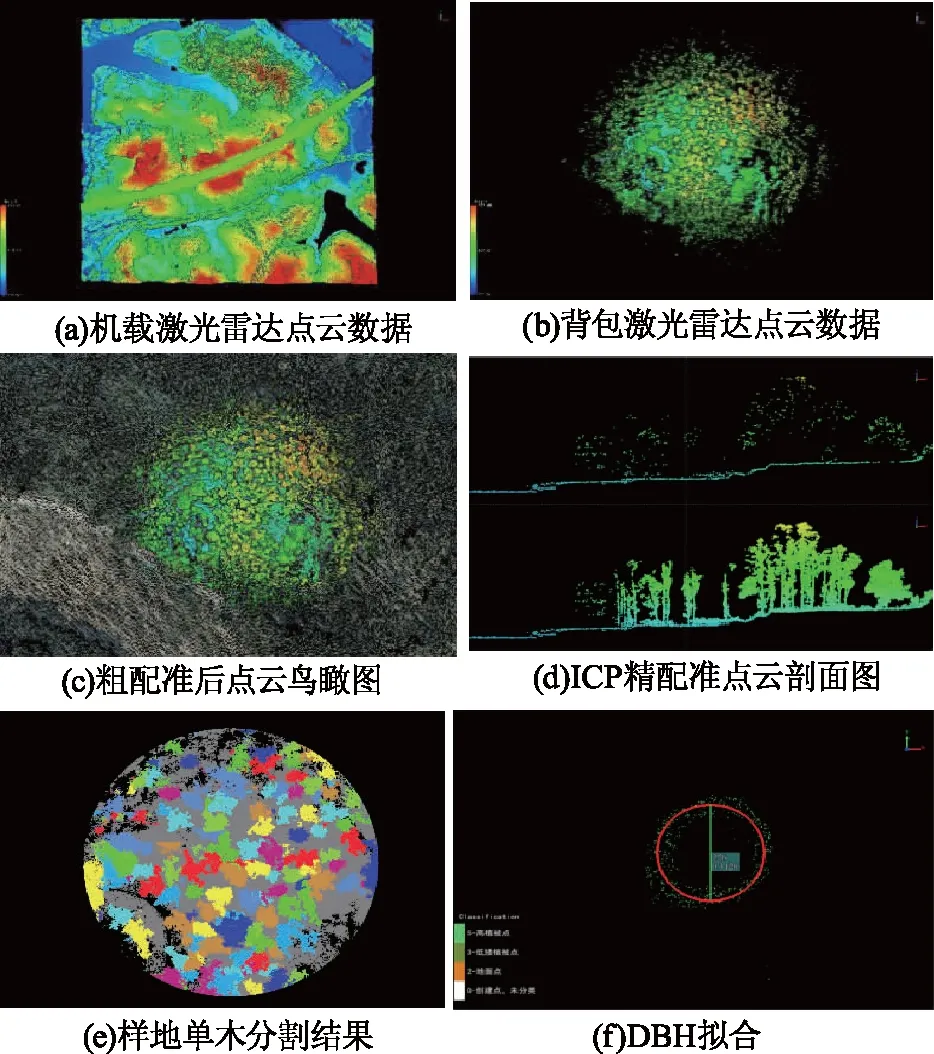
图2 融合背包和机载激光雷达估测单木因子处理步骤Fig.2 Processing steps of merging backpack and airborne LiDAR to estimate single tree factors
2.3 数据预处理
将样地采集的背包激光雷达GNSS信息、仪器姿态POS信息、相对坐标信息,通过LiFuser-BP处理软件生成具有地理信息的绝对坐标背包激光雷达点云数据。背包激光雷达属于近地面遥感离目标地物近,可获取点云点密度较高,同时也会存在较多其他地物的噪声,因此须将其降采样和去噪,进而保留点云特征,降低运算程度利于匹配。使用采样率为50%的均匀采样和领域降噪对解算完的数据进行处理,获得待配准的背包激光雷达点云数据。机载激光雷达点云点密度较低,无需降采样处理,在匹配之前将离散点进行去除即可。由于林区两者GNSS定位存在随机性偏差,导致同名点之间存在系统性的水平和高度偏差,两者依靠绝对位置叠加点云仅可作为粗匹配融合点云,为消除同名点差异的精匹配须使用迭代最近点算法(Iterative Closest Point,ICP)。其算法原理是将源点云Ps在目标点云Pt寻找最近对应点,迭代寻求计算平移R和旋转t,重复i次平移和旋转过程,得到最优变换矩阵R*,t*,最后将该变换作用于源点云Ps完成匹配,公式为:
(1)
式中:R*为最优平移矩阵;t*为最优旋转矩阵;Ps为源点云点集合;Pt为目标点云点集合;平移R为平移矩阵;t为旋转矩阵;i为平移和旋转次数。
以机载激光雷达点云作为源点云,背包激光雷达点云作为目标点云,变换后的机载激光雷达点云和背包激光雷达点云进行叠加,通过样地边界裁剪确定融合后的样地点云。地形高低起伏会对树冠分割和树冠特征因子估测产生较大影响,并通过采用改进的渐进加密三角网滤波算法(Improved Progressive TIN Densification,IPTD)进行激光雷达地面点提取,将有效消除地形影像,提高地面点的提取精度,在将点云高程归一化,去除地形对树高估测的影响[16]。
2.3.1单木分割及单木参数估测
单木分割采用面向点云的比较最短路径算法的单木分割算法[17]。该算法包括点云归一化、树干检测和胸径估计以及树冠分割,其中树干检测和胸径估计是先使用基于密度的聚类算法(Density-based spatial clustering of applications with noise,DBSCAN)检测到树干的位置,在通过树干胸径位置设置切片计算切片重心,计算切片各点距离重心的平均距离作为该树的胸径。通过识别树干并计算出基于树木代谢生理学模型的单木最短路径,分离得到各单木点云。由单木分割的结果分别计算出各单木参数。
2.3.2单木分割精度与单木参数估测精度评价
1) 单木分割精度评价。对于单木分割的评价精度,采取以下评价方式:a.实地测量存在单木,并从点云中分割出来的单木在其定位误差范围(2m)之内,即正确分割单木,称为真阳性(True Positive,TP);b.实地测量存在单木,并从点云中分割出来的单木不在定位误差范围(2m)之内,即漏分割单木,称为假阴性(False Negative,FN);c.实地测量不存在单木,点云中分割存在出来的单木,即错误分割单木,称为假阳性(False Positive,FP)。
为了评估单木分割的准确性,使用TP,FN,FP计算召回率(Recall,r)、精度(Precision,p):
(2)
(3)
2) 单木分割参数精度评价。单木参数估测的拟合效果采用决定系数(R2)和均方根误差(RMSE)2个指标进行评价。决定系数是用来表征方程对实测值的拟合程度;均方根误差用于评估拟合值与实测值的偏差,进而评价模型的回归效果。决定系数值越高,则实测值与估测值的相关性越强,拟合效果越好;均方根误差越小,则表明预测值的效果越好。
(4)
(5)

3 结果与分析
3.1 单木分割精度
对于海南热带雨林国家公园4块桉树样地内的158株树,将融合点云分割单木位置与全站仪定位位置进行比对,结果表明融合点云正确分割157株单木,平均召回率为99.6%,精确率为93.9%(表3),总体精度较高。其原因主要是样地内主要以大径材为主,易于背包扫描过程中识别到主干位置。此外,机载激光雷达点云提供了额外树冠顶部信息,使得融合点云中单木特征更为明显被识别分割。分析错误分割的样木点云发现,当样地存在树高大于1.3m的灌木时,算法无法自动剔除,被错误分割成单木。

表3 融合点云分割单木结果Tab.3 Results of fused point cloud segmentation of trees
3.2 胸径估测精度
4块样地的背包式激光雷达估测单木胸径值与实地测量胸径值的回归关系如图3所示,实地测量值与胸径估测值线性相关性较为明显。采用背包激光雷达获取的激光点云估测单木胸径时,发现在单木胸径估测会受到灌木、杂草和树枝树叶等遮挡影响。4块样地决定系数R2为0.982,RMSE为0.864。分析点云获取胸径与实际测量胸径差异原因可分两方面:一方面,天然林未开展经营活动,林相比较杂乱,林下灌木草本较大,导致天然林胸径分布差异较大造成;另一方面,由于部分单木树干不成标准圆形或者呈现畸形,导致拟合胸径的结果中不正确或误差较大。结果说明,利用背包式激光雷达估测单木胸径具有一定可靠性,对于经营活动较好的人工林胸径估计精度较高,但对于天然林和树干形状复杂的单木,其胸径估测精度会偏低一些。
3.3 树高估测精度
4块样地单木树高的背包式激光雷达估测值与实测值的回归关系如图4所示,基于背包激光雷达点云获取到的单木树高R2为0.835,RMSE为2.458。4块样地单木树高的融合激光雷达估测值与实测值的回归关系如图5所示,基于背包激光雷达和机载激光雷达的融合点云的单木树高R2为0.895,RMSE为2.005。两者之间的差异主要是在单木树高较高的林分,说明在在林分密度较大,树枝和相邻树木的部分遮挡,即便是双头的背光激光雷达也难以准确地探测到树木顶端部分,融合机载激光雷达数据可以有效的解决背包激光激光雷达在垂直方向的硬件缺陷。
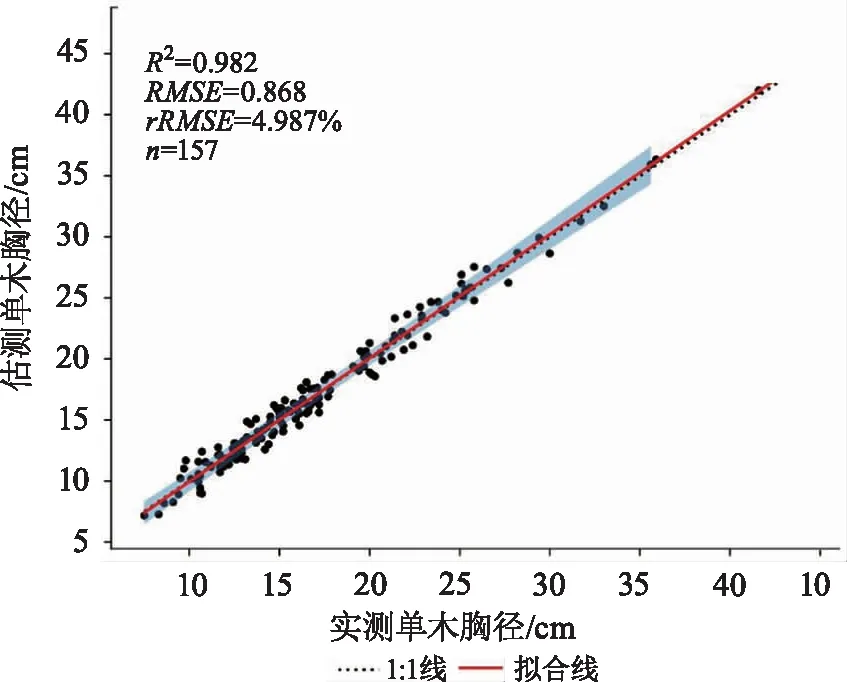
图3 样地胸径与估测样地胸径回归关系图Fig.3 Regression plot of sample site DBH versus estimated DBH

图4 背包点云树高与估测样地树高回归关系图Fig.4 Regression plot of backpack point cloud tree height against estimated sample plot tree height

图5 融合点云树高与估测样地树高回归关系图Fig.5 Regression of tree height in the fused point cloud against the estimated sample plot height
4 讨论与结论
4.1 讨论
1) 从单一激光雷达数据源检测单木,即单木分割表现上而言,由于机载激光雷达点云数据缺少地面树干信息,在进行单木分割时主要依赖于树冠点云形态学的连通和分离进行分类,使得树冠距离较近的林木错分,致使单木分割精度较低。背包激光雷达获取点云的方式是从下至上的获取,靠近于主干获取高质量点云数据,更为贴近林业调查工作的数据获取方式是降低错分的主要原因,但是受采集方式和地形的影响也会是限制应用的主要原因。
2) 从使用融合点云提取胸径的结果来看,机载激光雷达受上部冠层遮挡,无法获取到胸径处的点云,因此,在融合点云中发挥关键性作用的是背包激光雷达点云。背包激光雷达点云在采集过程中依赖于SLAM算法,目前常见用于户外的SLAM算法在地形起伏较大的地区,点云拼接效果较差噪声点较多。除此之外,采集数据过程中也会同时收集林分内GNSS信号,其信号强弱影响点云地理参考的错误,也是背包点云数据有额外的噪声的原因。从现有利用其它移动激光雷达扫描研究结果上来看,Hyyppä等[18-19]分别在株树密度较小和较大的2块松树和云杉混交林中利用BP-MLS-VUX1设备测量林分单木胸径,与实测结果相比,单木点云胸径的均方根误差(RMSE)为2%~8%;Ko等[20]利用Libackpack D50对韩国济州岛的柳杉种植园内的157株树进行了扫描,与人工测量的DBH相比,背包激光雷达点云的RMSE值范围从1.22~1.40cm,RMSE%从4.69%~6.04%;Hartley等[21]利用Hovermap在新西兰松苗圃地进行扫描,在针对现场测量的DBH进行评估时,相关性水平很高(R2值范围为0.96~0.99)和误差水平比较低(RMSE值范围为1.72~2.61cm,RMSE百分比范围为5.4%~8.2%)。点云测量树木的直径往往使用1.3m点云来估计精确的圆,测量单木主干和树皮的形状不规则,主干形状更像是椭圆而不是圆,测量林分树种林学特性也是限制测量精度的原因之一。
3) 与地基激光雷达相比,使用地基激光雷达采集林业数据,须进行布设标靶、架站、扫描和移站等操作,完成整体数据采集需要花费一定的人力及时间,采集完的数据也需要进行多站拼接后才能输出最终的采集结果。与机载激光雷达相比,背包式激光雷达具有效率高、全覆盖和真三维测量等优良的技术特性,携带方便,数据采集不受天气等外界因素的影响,测量范围容易控制,有着良好的应用前景。但激光雷达数据在时空分布上不具有优势,也不能够提供反演森林生物物理参数所需的光谱信息,而被动光学遥感可以弥补这一不足。因此,将背包、地基、机载激光雷达和被动光学遥感结合有利于提高森林资源的监测能力,可为森林生态研究提供科学依据。
4) 就我国现阶段国家林草生态综合监测评价技术规程的质量评定检查依据规定而言,对样木漏测多测、对样木胸径测定、对样木树高测量的精度要求都很高,使用融合机载和背包激光雷达点云获取符合林业调查质量要求的技术手段仍有待于进一步加强。
4.2 结论
本研究融合背包激光雷达数据和机载激光雷达数据对单木因子进行了估测,与实际样地数据对比表明,融合点云数据在胸径的估测上,R2=0.982,RMSE=0.868cm;在树高的估测上,R2=0.895,RMSE=2.005m,而只使用背包激光雷达数据获取树高,R2=0.835,RMSE=2.458m。这说明基于背包激光雷达点云数据获取的单木胸径精度较高,融合点云数据可改善单一背包数据对树高上的估测。本文将2种不同平台的激光雷达点云数据进行融合,整合两者优劣势互补,既可获取到林下的主干信息,又可获取到更为丰富的冠层结构信息。同时极大程度上减少了人工野外调查繁杂度,提高了样地调查效率,可为森林资源调查与检测提供新技术手段支撑。
猜你喜欢
北京测绘(2022年5期)2022-11-22
农业工程学报(2022年14期)2022-10-19
实验室研究与探索(2022年4期)2022-08-06
林业科学研究(2021年6期)2022-01-05
内蒙古林业调查设计(2021年5期)2022-01-05
汽车观察(2021年8期)2021-09-01
林业科技情报(2021年2期)2021-07-13
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
森林工程(2018年5期)2018-05-14