
ROSS:后国际空间站时代的俄罗斯空间站
2023-01-12 10:09汤川学
太空探索 2022年12期
文/汤川学
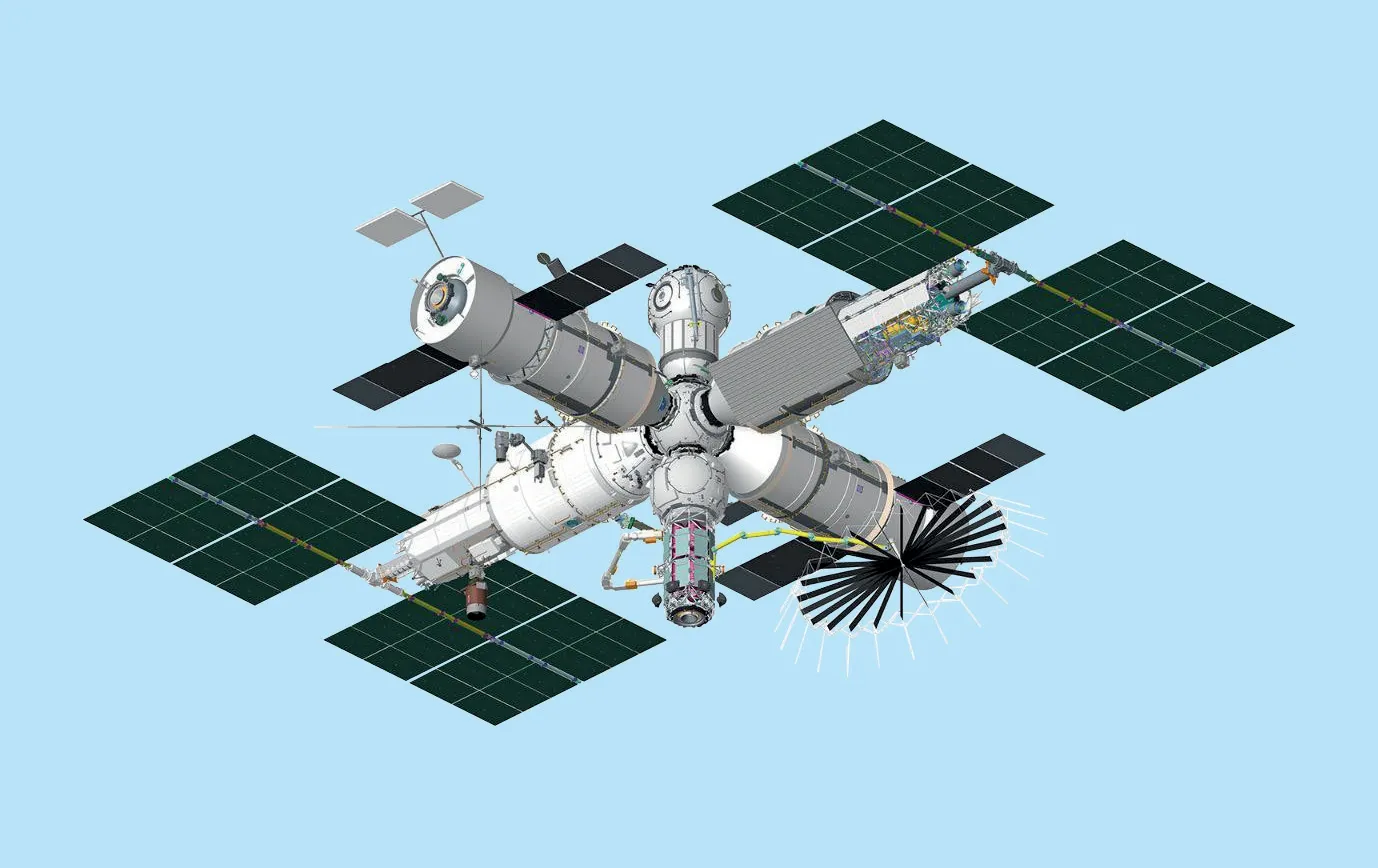
▲ROSS第二阶段概念图

▲和平号空间站
目前地球轨道上有两个空间站正在运行,一个是正在建设中的中国空间站,另一个是已经建设完成并正式运行了十多年的国际空间站。
国际空间站是一个多国合作共同建成的空间站。从主体结构上讲,整个国际空间站可以被分为俄罗斯段和欧美段。但近年来,由于欧美与俄罗斯在各方面的矛盾与冲突越来越激烈,时不时就会出现合作不愉快的新闻,甚至还有俄罗斯联盟飞船在轨疑似被钻孔的事件。尤其是在今年的俄乌冲突爆发后,欧美与俄罗斯之间的关系日趋紧张,而双方在地面上的直接和间接的冲突也不可避免地影响到在太空运行的国际空间站。
就是在这个时候,有关俄罗斯规划建设新空间站的消息开始频繁出现,也引发了一些讨论。在此说一句题外话,有些媒体为了吸引眼球而故意扭曲俄罗斯方面的言论,说俄罗斯将在2024年退出国际空间站,而故意省略了原话中跟在2024年后面的“后”字,一字之差,谬以千里。而且俄罗斯国家航天集团现在仍然在想办法延长俄罗斯舱段的使用寿命。
各个舱段都已经深度整合了的国际空间站,想要分家是一件极为困难,并且对各方都完全没有好处的事情。因此有理由推测,哪怕欧美与俄罗斯的冲突再激烈,国际空间站也不会分家,国际空间站将会保持如今的样子,持续运行到退役,这是双方想要利益最大化的唯一选择。
俄罗斯新空间站的演变
在苏联时期,苏联曾经在轨道上建造过空间站历史上最大最重的空间站之一——和平号空间站,但到1991年12月25日苏联解体时,许多舱段都还未发射,“和平号”仍然没有建造完成,而大量在苏联时期提出的计划,乃至已经在进行中的任务都因资金和能力不足等问题被取消,其中就包括了和平号的下一代空间站——和平2号空间站。
“和平2号”有着许多不同版本、不同倾角、不同用处的草图,但无一例外都没能走下图纸,成为现实。随着俄美关系在苏联解体后迅速升温,俄罗斯在1993年与美国达成合作,苏联的和平2号空间站和美国的自由号空间站,这两个原本属于两个阵营的空间站项目,以时代的巨变为契机,经过一些妥协与协调,融合成了一个空间站,即我们所熟知的国际空间站。原本用于“和平2号”的核心舱DOS-8被用在了如今的国际空间站上,成为了俄罗斯舱段乃至整个国际空间站最为重要的舱段之一。

▲建设中的东方航天发射场

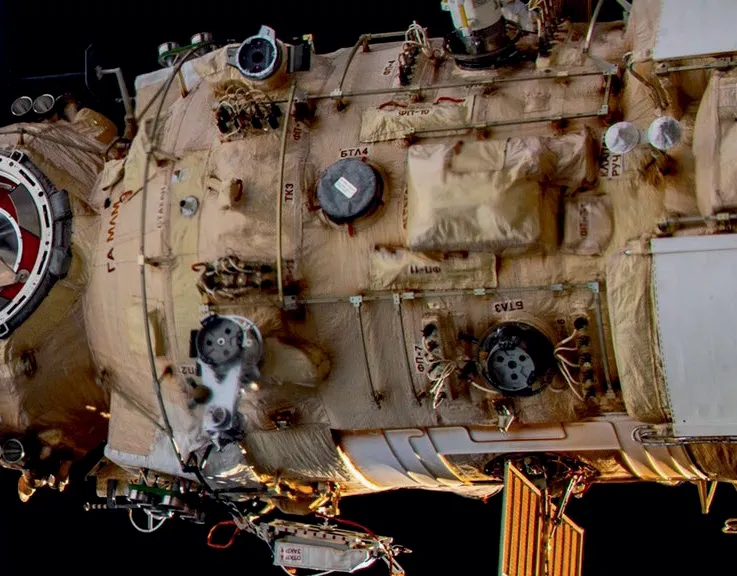
▲地面上的“码头号”
俄罗斯与欧美在国际空间站上的合作总体来说还是顺利的,但是纵观整个国际空间站的运行历史,哪怕是在合作初期,美国和俄罗斯之间的合作也并非完全融洽,在舱段的发射细节上、航天员的调度上,在是否允许自费太空游客上国际空间站上等问题上都有过或大或小的分歧。对俄罗斯 方 面 来 说,2001年3月23日,和平号空间站这个曾经属于苏联、后来属于俄罗斯的庞然大物从轨道上坠落时,让相当多曾是苏联人的俄罗斯人十分遗憾。俄罗斯对想要再建造一个完全属于自己的新空间站的想法在“和平号”坠落后就从未消失过。2001年4月,时任俄罗斯航空航天局局长尤里·科普特夫首次公开表态称,俄罗斯在未来会有一个属于自己的空间站。当然,他也说必须在俄罗斯的经济好转,能够支撑计划实现时,这个计划才能成为可能。
经过几年酝酿后,2008年,OPSEK空间站方案被提出。这个空间站在计划中将会使用国际空间站俄罗斯段的部分舱段来建造,如在去年已经发射到国际空间站上的科学号舱段。OPSEK的搭建流程很长,搭建时会先从国际空间站俄罗斯舱段开始,该空间站在分离时会带走几乎整个俄罗斯部分,并且在一开始将由星辰号核心舱来负责空间站的移动与升轨机动,直到一个新的核心舱的到来。如今我们知道,以上这些情况都没有发生,OPSEK在2017年左右便流产。OPSEK的论证过程历经波折,经过了多次方案改动,在论证过程中也不乏来自俄罗斯能源局里专业人士的质疑。在资金、技术、方案可行性的多重困难面前,OPSEK最后毫不意外地并未付诸行动,最终只停留在了论证阶段。但是,这个空间站的论证过程明显影响到了最新的俄罗斯自主空间站方案,也就是接下来我们将会讨论的新空间站方案——俄罗斯轨道服务空间站(ROSS)。
俄罗斯轨道服务空间站
俄罗斯轨道服务空间站(ROSS),也有叫法叫俄罗斯轨道空间站(ROS),这个空间站的名字未来还有可能会变更,但这些名字所指代的空间站都是同一个,以下为了方便,就直接简称ROSS了。

▲ 雄鹰号飞船

▲ 雄鹰号的框架

▲ 安加拉A5发射图
ROSS概念首次提出并引发讨论是在2021年4月左右,并很快就有了大概的构型图。我们先了解一下目前已知的一些基本情况:ROSS将会是一个全新的空间站,这个空间站将不会采用任何遗留自苏联时期的空间站模组和构型,这意味着ROSS是一个全新设计的空间站;ROSS不会采用任何来自国际空间站上的俄罗斯模块,说明ROSS是一个全新制造的空间站;ROSS将采用的轨道十分特殊,目前官方公布的ROSS轨道倾角约为97度,轨道高度约为370千米,是一个倾角极高的太阳同步轨道,这种轨道常常被气象卫星、太阳观测卫星所采用,但从未被之前其它任何空间站所采用,这意味着ROSS将会成为世界上第一个在太阳同步轨道运行的空间站。在目前的官方资料中,ROSS的载人策略与国际空间站和中国空间站的长期有人在轨驻留的载人策略不同,ROSS在轨的大部分时间里将不会有航天员在轨驻留,而是处于自动运行的状态,由地面遥控进行指定任务,当然,航天员将会按照需求进入空间站,进行在轨试验、在轨维修和太空行走等任务。
在目前的官方资料中,ROSS将会分为两个阶段来建成。第一阶段建设将开始于2028年,并在2030年结束,结束时空间站重量约为55吨,加压空间约为217立方米。第二阶段将在2030年后开始,目前规划的第二阶段结束时,空间站重量约为122吨,加压空间约为505立方米,大约是目前国际空间站俄罗斯舱段258立方米左右容积近两倍。用于建造ROSS的火箭将不会是发射过所有苏联和俄罗斯空间站模块的质子系列火箭,而将由安加拉A5的改进型安加拉A5M发射。发射ROSS模块的发射场也将不会是大家熟知的位于哈萨克斯坦共和国境内的拜科努尔发射场,而是位于俄罗斯远东地区阿穆尔州的新发射场——东方航天发射场。
至于将要使用的载人飞船和货运飞船,在建设早期,俄罗斯还会继续使用联盟MS和进步MS飞船,但是使用的火箭将从联盟2.1a转换为联盟2.1b火箭,因为“联盟2.1b”相比于“联盟2.1a”可以多提供约一吨的运力。“联盟2.1b”按理说应该会进行载人飞行认证,但是在俄罗斯军队2022论坛中,进步火箭航天中心表示没有对“联盟2.1b”进行载人航天认证的计划,所以在此需要打个问号。在未来,将会使用可重复使用的雄鹰号飞船来执行载人任务,以及载货和货物返回任务。它们也同样都将从东方航天发射场发射。
目前ROSS的整体设计仍然处于一个相对模糊的状态,很多细节还没有确定下来,即便如此,很多相关信息被透露出来。
首先是科学与动力模块(NEM)及基本模块。NEM模块最初是为国际空间站俄罗斯舱段所研制,但后来这个模块的建造时间不断拖延。该模块将成为ROSS第一批进入轨道的模块。基本模块将成为航天员生活的场所,提供生命保障,其外型与NEM基本一致,两个模块将在节点舱模块两边对称分布,NEM和基本模块上的大型太阳能电池组将产生高达55千瓦的电力,为ROSS提供主要能源。NEM和基本模块将各有两个睡眠区和一个厕所,足以支持4位航天员在轨驻留。
其次是节点舱模块。计划中ROSS的节点舱模块其实与目前已经在国际空间站上对接于科学号上的码头号节点舱模块几乎如出一辙,如果不出意外,ROSS上的节点舱模块应该与码头号基本一致。还有一个气闸舱,这个气闸舱将会在发射时就已经与节点舱连接在一起。

▲“码头号”

▲ROSS第一阶段概念图
此外,还有第二阶段将加入ROSS的模块。目前有关它们的信息不多,其名字是生产模块、目的模块。生产模块可用于在空间技术和材料科学领域进行实验,其实验成果可以极大地推动俄罗斯纳米技术以及微电子技术的发展,这同样适用于生物技术领域。目的模块将用于自动设备的组件存储、组装和测试。一些类似的实验已经在国际空间站俄罗斯舱段中展开。还有一个半加压的可对接卫星平台,可以与ROSS共同运行,并且在必要时可以与空间站对接加油,并接受在轨维护。但是对于这个卫星平台的功能和作用、具体参数等,目前知之甚少。
ROSS,俄罗斯的空间站

▲弗拉基米尔·索洛维约夫
在俄空局2022年8月的官方杂志中,国际空间站俄罗斯舱段的主管,苏联航天员弗拉基米尔·索洛维约夫接受了采访,并为我们简要介绍了ROSS的方方面面。我们能从这篇访谈看出一些端倪。
对于最根本的ROSS的建造意义,弗拉基米尔表示,由于国际空间站和过去所有的苏联空间站都位于低倾角轨道,这样的好处是能让火箭尽可能地打更重的载荷,但是坏处是低倾角的轨道上的空间站是无法覆盖俄罗斯领土的,使得空间站的对地观测效能无法在俄罗斯的领土上最大化,新的空间站将解决这一问题。此外,目前国际空间站俄罗斯舱段的寿命已经逐渐耗尽,俄罗斯段的模块发射时间都较早,俄罗斯段的曙光号功能舱和星辰号核心舱已经在轨超过20年,俄罗斯航天员们不得不花费越来越多的时间来维护和维修已超过设计寿命的机载系统,航天员进行科学实验的时间越来越少。因此,建造一个更新的、更适合给俄罗斯服务的空间站是有必要的。并且,ROSS可以在地球磁场保护较少的太阳同步轨道上进行初步的生物医学研究,以研究未来的星际探险中航天员将面临什么风险,探究人体在星际航行中的变化和可能面临的风险。
对于空间站97度的倾角能带来什么好处,弗拉基米尔表示,现如今国际空间站的51.6的倾角只能让国际空间站经过约10%的俄罗斯领土,而采用了约97度倾角的ROSS可以观察100%的俄罗斯领土。ROSS不仅可以观测俄罗斯全境,还可以用光学、红外、紫外等探测器以及雷达探测地球两极,研究极光现象,为全球提供更加精准的天气预报;可以每90分钟就执行一次,将使俄罗斯能够跟踪地球两极附近各种物体的活动,提供新的科学研究方向。
对于为何航天员不常驻ROSS,弗拉基米尔表示,俄罗斯在几十年的空间站运营中发现,航天员在空间站上的科学产出和实验进行得并不总是那么高效,并且在空间站上长期在轨驻留,为航天员提供食物、衣服、氧气和水是非常昂贵的。此外,由于ROSS的特殊轨道,在ROSS上的航天员受到的宇宙辐射相比于国际空间站上更大,更容易伤害身体,这对任务的持续时间造成了一定的限制。根据初步计算,单次的航天员乘员组将能够一次在ROSS上工作一到两个月,进行调试维修工作以及太空行走,不会对他们的健康造成伤害。因此,俄空局建议长时间以自动模式运行ROSS,希望在无人运行与有人运行中找到一个最佳的平衡点。

▲ROSS模型
除以上问题外,弗拉基米尔还对ROSS的前景进行了展望。ROSS可以被当做前往月球或火星的跳板,成为俄罗斯前往更远的目的地的太空港。前往月球或火星的俄罗斯乘员组可以现在空间站中驻留,然后等待前往目的地的飞船到来。这种方案可以减少对于超重型火箭的需要,使用更实惠的重型火箭便可以完成任务。
从以上内容看,ROSS将是一个完全为了俄罗斯利益而生的空间站。在苏联时期,拜科努尔发射场是唯一可以用来发射空间站舱段和载人飞船的发射场,但在苏联解体后,俄罗斯只能以租用的方式来使用拜科努尔发射场,这对于俄罗斯来说是一个不小的掣肘,于是与拜科努尔发射场纬度差不多的东方航天发射场便应运而生。ROSS可以完全只依靠这个在俄罗斯境内的发射场完成所有任务,这对于如今处处被制裁,与哈萨克斯坦的关系微妙的俄罗斯来说无疑是个好消息。
而从目前的ROSS方案和渲染图来看,对地球的遥感观测将会是ROSS的主要任务之一。ROSS的舱外载荷将相当多,主要遥感观测范围除了俄罗斯本土,肯定还将包含北极圈地区等对于俄罗斯来说有着重大利益的地区。由于ROSS将是完全由俄罗斯独立建造的空间站,因此不排除在ROSS上执行军事任务的可能。这些因素也将使得ROSS的经济意义和战略意义大大增强。
猜你喜欢
军事文摘(2022年24期)2022-12-30
军事文摘(2022年18期)2022-10-14
军事文摘(2022年8期)2022-05-25
太空探索(2022年3期)2022-03-28
国际太空(2021年8期)2021-11-05
航天工业管理(2020年11期)2021-01-04
军事文摘(2020年24期)2020-02-06
小哥白尼(趣味科学)(2019年10期)2020-01-18
军事文摘(2019年18期)2019-09-25
制造技术与机床(2019年4期)2019-04-04
