水下穿越管道ROV检测评价系统的应用
2023-01-11 03:22金兆波冯德佳韦凤联
全面腐蚀控制 2022年11期
金兆波 柳 雄 冯德佳 韦凤联
(1. 大庆市汇通建筑安装工程有限公司,黑龙江 大庆 163311;2. 国家管网集团广东运维中心,广东 广州 510710)
0 引言
西气东输管道线路西起新疆轮台轮南首站,东达线路末站上海。途径新疆、甘肃、宁夏、陕西、山西、河南、安徽、江苏、上海等地区,线路全长约4000km,穿越众多大中小型河流。水下穿越管道因地质条件、施工等状况使得管道外防腐层损伤严重,目前对这部分管道还未开展过全面检测,仅靠岸边测试桩检测数据评估,详尽的腐蚀与防护效果不清楚,更谈不上对腐蚀与防护安全状态的管控。
目前国内外对水下管道检测的技术手段主要包括潜水员水下作业、FieldSens技术、ONE-PASS技术和ROV技术。可查阅到的水下穿越管道的路由定位方法基本都是采用有源电磁信号检测方法,就是给管道施加一个电磁信号,在管道上方用接收机接收信号确定管道位置和埋深,该方法成熟可靠。但是既能定位,又能检测防腐层和阴保有效性只有ROV能够全面实现[1]。
潜水员水下作业就是潜水员下潜至水底进行检测时,需要将检测设备和管道表面进行接触,检测的条件比较苛刻不易满足,另外这种检测的适用范围有限,而且周期无法保证,安全风险高,因此不具备普及的条件。
英国FieldSens管线探测仪是通过工作船拖拽接收器沿管道上方蛇形游走,水下信号接收装置接收信号发射机给管道施加的电磁信号来定位管道位置。该技术属于水中检测技术,只能确定管线的位置。
美国STARTRAK公司生产的ONE-PASS河流穿越管道检测系统,可在水面上对水下管道进行定位。给管道施加交流信号后,船载接收器在水中沿管道路由S形游走来定位管道位置,其检测结果仅能提供位置和埋深信息,定位深度不超过40m,不能对阴保效果进行检测,无法满足外腐蚀检测需求。
国内River-ROV检测系统将接收器和参比电极搭载到机器人上,通过推进器控制其移动,可下潜到水底在河床上(更靠近管道位置)对水下穿越管段实施路由定位、防腐层破损检测、阴极保护效果评价等项目[2]。River-ROV检测系统属于电磁法+CIPS+DCVG多功能水下检测技术,可潜入水下深度50m,水底河床定位覆土深度超过40m,适用环境尤为广泛。
1 ROV搭载的检测技术
穿越江河管道的检测系统River-ROV,属于缆控水下机器人检测装置,由水上控制显示终端和水下检测装置组成,水上和水下部分通过脐带缆实现连接,水上发电机提供动力。ROV系统整合2D水下环境声呐探测、管道定位、阴保电位CIPS测量、电位梯度DCVG检测、埋深测量、光纤通讯、GPS定位、数据库及检测数据分析等技术手段,实现对江河穿越管道外防腐与阴极保护状况等多方面的检测。
1.1 管道电磁法定位、测深技术
对管道的位置、埋深及走向的测量,是对管道安全检测的第一步,精确定位管线位置非常重要,仪器探测的深度及电流值均受管道定位精度的影响。应用有源电磁探测方法,可实现对陆上及水下管道的探测。探测原理是:应用发射机为管道施加交变的电流信号,在管道周围会产生交变的磁场,使用电磁法感应线圈在管道上方测量所施加信号的分布情况,依据信号分布规律可精确定位管道的位置,同时通过该信号值可以探测管道的埋设深度,实时显示定位信号,自动/手动测定管道的埋设深度[3]。如图1为峰值法定位示意图。

图1 峰值法定位示意图
管道埋深的测量是在峰值法模式下实现的,即应用两个相同的有固定间距的水平磁感应线圈,分别测出两个线圈的磁感应强度Et和Eb,可计算出埋深数值。管道埋深测量原理如图2所示。

图2 管道埋深测量原理
1.2 DCVG直流电位梯度检测技术
直流电位梯度法的检测过程是使用一个灵敏的毫伏表,两端连接两个测量电极。当电极置于阴极保护所产生的电场上时,电极两端电压将不同。测量两个电极在电场中产生的水平电压梯度输出值。应用江河ROV管线检测设备电位梯度测量功能,根据测量的电位梯度,来判断水下管道的电位梯度分布状况。依据已有的检测标准,通过电位梯度的变化可以测量出管道防护层的缺陷位置。如图3所示。

图3 电位梯度示意图
1.3 CIPS阴保检测技术
现场使用江河管线ROV检测系统,在管道上实施阴极保护的检测。检测装置一端使用带绝缘层的金属导线与水下管线的测试点连接,导线的另一端与检测装置内部的自动电位记录仪相连接,记录仪的另一端与饱和的硫酸铜参比电极相连构成测量的回路。当检测系统放置在水中时,由于水是导体,并且在装置定位在管道的正上方时,可以进行自动或手动的测量,所测得的电压即为管道的保护电位。使用该系统可以测量管道沿线的电位分布状况,通过电位的分布状况可以判断管道的阴极保护状况,并间接分析管道上防护层是否存在缺陷。如图4所示水下检测装置CIPS检测示意图。
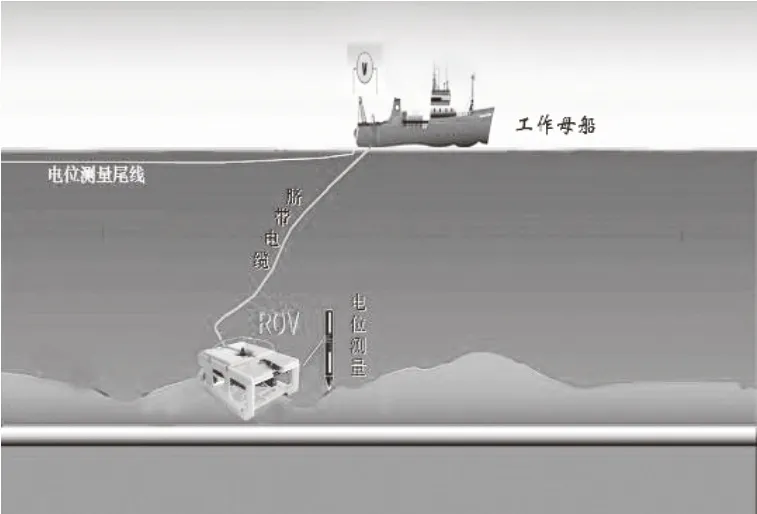
图4 水下检测装置CIPS检测示意图
1.4 声呐检测技术
声呐是一种利用声波水下传播特性,通过电声转换和信息处理,完成水下探测和通讯任务的电子设备,属于声学定位范畴[4]。在水质较差能见度较低的情况下,River-ROV装置的视频检测系统只能在较短距离的可视(约为50cm),而ROV在水下的运动状况及周围环境状况无法获得,所以需要在系统中增加2D成像声呐系统,来增加ROV在水下的可视性。通过BlueView的2D声呐可以观察ROV周围的环境情况,一方面可通过声呐判断ROV在水下的位置及运动状态为用户提供水下环境状况,起到避障作用;另一方面可以通过对环境的观察判断管道埋设环境的情况。由于ROV是潜到河床处作业,声呐影像是现场判断ROV是否位于水底的重要依据。如图5为2D成像声呐检测图。
1.5 视频检测技术
水下检测平台的视频系统主要包括:水下照明灯、水下摄像机、视频传输系统组成。在水下光照度及透明度不佳的情况下,可以开启水下照明灯,利于水下摄像机对管道状况及周围环境状况进行观察和检测。应用视频检测系统可以对管道埋设情况、管道外表和周围生物覆盖情况进行直接的观察及存储。如图6为水下机器人视频检测图像。

图6 水下机器人视频检测
2 检测基本情况及结果
石马河三穿越段检测
穿越处管道管径为Φ1016,起、终点里程158+347.0—158+594.3。管道参数如表1所示。

表1 管道参数
2.1 信号施加
在河东岸测试桩处施加4安培640Hz检测信号,两岸电流信号均在1A以上,足以保证水下管道定位测深的信号需求。
阴保检测信号:恒电位仪面板显示通电点处电位波动极大,-300mV~-2000mV以上,初步判断存在杂散电流干扰,为了现场测试结果的有效性,将恒电位仪调至手动输出模式,此时测量电位为-1300mV,相对稳定;该检测项信号调制完成。
2.2 检测现场
现场检测人员对东莞站石马河三穿越管段实施检测,使用卫星同步发射机在河东岸测试桩处施加4A,640Hz检测信号,两岸电流信号均在1A以上,保证水下管道定位测深的信号需求。
为实施阴极保护系统有效性和外防腐层质量状况检测,在恒电位仪串接卫星同步断流器,恒电位仪面板显示通电点处电位波动极大,-300mV至-2000mV以上,初步判断存在杂散电流干扰,为实现现场测试结果的有效性,将恒电位仪调至手动输出模式,此时测量电位为-1300mV相对稳定,保证测试工作的正常进行。
检测人员在石马河西岸搭设检测平台,同时将电位测试尾线从东岸牵引至西岸。原计划采用ROV自身动力系统及单侧拖行方式实施检测,现场发现管道上方水深变化较大,管道横向两侧水位变化较大,ROV水下运动装置正常行驶(搁浅)作业难度极大,经现场项目组讨论,变更作业方案,采用两岸拖行方式实施ROV检测。
水下穿越段管道现场检测流程:搭设好检测平台后进行仪器调试,仪器工作状态良好时将ROV移至水较深处,实现ROV的自由运动,进而获取管道水下穿越段各测点处的检测数据。在ROV向管道方向运动的过程中,控制平台处检测人员时刻观察信号显示,确定ROV跨过管道后,控制ROV迅速下沉至河床,开始采集数据,在该过程中测量管道位置、水深、覆土深度、管地电位、电位梯度、声呐等数据,之后开启顶升使ROV上浮至水面获取GPS信号,通过内置惯导系统,精确换算出水下管道真实位置坐标,该测点检测完成后ROV行进至下一测点,重复上述操作直至整条河流穿越段检测完成,进行数据分析。
2.3 检测成果
(1)通过ROV检测系统对水下管道路由进行探测,获取到了管道覆土深度、水深以及埋设位置GPS坐标等管道位置信息。测量结果表明该穿越管段未出现管道悬跨现象,管道最小埋深为1.67m,位于检测段57.2m处,测点号P11;现场对各测点进行了水下环境声呐摄像勘察,未发现异常现象;该水域最大水深2.06m,最大水深处位于检测段17.6m位置,测点号P5。检测管段剖面图如图7所示;

图7 检测管段剖面图(横/纵坐标轴1:1比例)
(2)应用ROV检测系统对穿越管段的阴极保护效果实施检测。测得石马河三穿越管段管地断电电位处于-392.5~-1908.1mV之间,通电电位在-750.3~-1930.2mV之间,电位波动极大,杂散电流干扰严重,依据现有数据无法准确判断阴极保护有效性。建议在测试桩处应用试片断电法或极化探头法测量管道极化电位,以供参考;同时为保证管道安全有效运行,应开展管道沿线杂散电流检测及治理;
(3)对水下管道实施外防腐层完好性检测,现场应用DCVG方法测试管地通断电位梯度值,最大值仅为-2.3mV,通断电位梯度差值最大为0.1mV,判断水下管段无明显防腐层缺陷。
3 结语
(1)能够全面获取管道覆土深度、水深以及埋设位置GPS坐标等管道位置信息;
(2)能够全线获取水下穿越管段每处的阴保电位,评价阴保状况;
(3) 能够全程检测水下穿越管道外防腐层附近处的地电位梯度,评价外防腐层完好性;
(4)通过现场应用,证明水下穿越管道检测评价系统ROV技术成熟、效果显著,填补了水下穿越管段检测盲区,为日后的运行维护、降低成本、保障安全提供强有力的技术支撑。可在水下穿越管道腐蚀与防护检测领域内推广应用,为其他水下穿越管道的安全运营管理提供借鉴。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
数学物理学报(2022年5期)2022-10-09
煤气与热力(2021年12期)2022-01-19
化工管理(2021年7期)2021-05-13
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年12期)2017-04-23