
新工科背景下仿生设计在“机械创新设计”课程中的教学实践
2023-01-06 13:10姜亚妮边义祥
现代制造技术与装备 2022年11期
姜亚妮 边义祥
(扬州大学 机械工程学院,扬州 225127)
为了适应新时代科技变革和产业升级的需要,教育部在高校教学中积极推动新工科建设,以满足国家和企业对创新人才的需求[1]。机械设计制造及其自动化专业的本科高年级阶段,一般都会开设“机械创新设计”课程[2]。通过学习这一课程可以提高学生的机械创新设计能力,为后续的毕业设计打下基础,同时能帮助读研的同学在研究生阶段顺利开展创新性课题研究[3]。
在课程学习过程中,通过课本学习、课堂教授、视频教学等多种教学手段和方法,学生可以学习到多种机械创新设计方法[4]。但是,经过多年的教学实践发现,本科阶段的同学基本没有接受过系统的创新设计训练,对于较为复杂的创新设计方法和工具的学习兴趣不浓厚,学习效果也不太理想[5]。
仿生学是将自然界中生物的感知和运动行为作为研究对象,通过模拟生物体组织和器官的材料特性(机械力学性能)、构造和感知原理,达到模仿生物运动和传感的功能[6]。机械仿生设计是“机械创新设计”课程的重要内容。目前,教材上的内容多为现象描述,即简单描述仿生机械结构和对应的生物体结构,而对仿生机械设计的具体过程涉及较少。虽然大部分学生对机械仿生设计有着较为浓厚的兴趣,但通过现象描述学习“机械创新设计”课程,还是无法将仿生机械设计的方法应用在具体的课题研究中。
本文以昆虫毛发感受器的仿生设计为例,研究“机械创新设计”的教学过程和教学方法。通过实例教学,使学生能够快速掌握仿生机械设计的概念、方法及设计过程,并能实际应用这一机械创新设计方法。
1 课堂教学
在课堂教学阶段,当讲授机械创新设计方法中的仿生设计时,一般都是通过举例说明仿生设计方法的应用,如飞机、直升机、听诊器以及锯子的设计等。由于课本或课件仅讲授仿生对象和设计结果,忽略了仿生设计过程,学生虽然对仿生设计比较感兴趣,但对于如何开展仿生设计仍然不知从何下手,教学效果欠佳。在“机械创新设计”课程的教学过程中,尝试通过设计实例加深学生对仿生设计的理解,便于在以后课题研究中的实际应用。
在课堂教学过程中,讲授完课本知识后,指定两本国内比较好的仿生设计书籍《仿生机械学》[7]和《仿生学导论》[8]供学生课后延伸阅读。阅读后,学生对于仿生设计的概念、方法有了初步了解,随后进入集中讨论阶段,采用头脑风暴的方法,集思广益,结合各自课题组的研究领域,提出具体的仿生设计课题。最后,选择模仿昆虫的毛发感受器结构,设计仿生气流传感器进行详细讲解。
2 生物原理研究
在生物原理分析过程中,要综合应用生物、材料、物理、力学、机械、电子和通信等交叉学科的基础知识,分析生物体相关组织和器官的材料特性(机械力学性能)、结构组成(局部和整体结构)、工作过程和功能原理,为机械仿生设计打下坚实的基础。
选定课题后,需进行资料检索。通过查找生物学方面的书籍和相关期刊论文,了解到很多昆虫如蟋蟀、蚂蚱等体表长有毛发感受器,结构如图1所示。

图1 昆虫毛发感受器结构
一根纤细的毛发垂直立于昆虫体表,末梢自由,根部穿过一层角质膜,和一个神经元相连。神经元内部含有液体,内外具有离子梯度。受力变形后,神经元内外产生离子流动形成神经信号。当昆虫体表有气流经过时,毛发受气流作用产生弯曲变形[9]。毛发的弯曲变形通过柔性胶质膜传递给神经元,神经元产生神经信号后,通过神经纤维上传到昆虫大脑,使昆虫能够感知周围的气流变化,进而得到入侵者或者捕食者的相关信息,包括方位和距离,从而逃避天敌的追捕[10]。相反,捕食昆虫根据体表毛发感受器的信号感知被捕食者的方位信息,快速准确捕获猎物[11]。在这种捕猎和反捕猎的过程中,昆虫进化出了体积小、效率高、功能全的体表毛发感受器,能够通过感知周围空气流场的变化,识别天敌或捕食对象的方位[12]。
3 机械仿生设计
在机械仿生设计过程中主要进行材料选择和结构设计,并对组装的器件进行功能仿真或测试,将结果和仿生对象进行比较,验证仿生设计结果。
3.1 材料选择
本文模仿昆虫的毛发感受器,设计一种仿生气流传感器。首先,选择合适的敏感材料,以模仿昆虫神经元的结构和功能。通过查找资料能够感知自身变形的传感元件有压阻传感器、电阻应变类传感器、电容类传感器、压电传感器及摩擦发电传感器等。神经元是一种生物组织,具有柔性特点,而压阻式、电阻式和电容式传感器都是刚性结构,不建议采用。摩擦发电式传感器结构、传感电路较为复杂,制备困难,也不建议采用。经过比较,选用结构简单的有机压电材料作为敏感材料。有机压电材料具有直接的机电转换性能,在受到外力作用产生变形时,由于压电效应将产生传感信号,可用于模拟神经元的结构和传感功能。此外,采用柔性的有机光纤杆模拟纤毛部分,采用柔性塑料薄膜模拟角质膜。
3.2 结构设计
昆虫毛发感受器中的神经元内部为液体,受力变形时会产生神经信号。模仿神经元的结构,将有机压电材料聚偏二氟乙烯(Polyvinylidene Fluoride,PVDF)做成圆球壳体,内部填充导电液体-液体炭黑,外部涂镀金属薄层,用作外部电极。经过极化后,PVDF层具有压电传感功能,整体可以作为仿生神经元。因此,采用仿生神经元的整体结构模拟昆虫纤毛感受器的神经元结构,采用弹性模量大的橡胶薄膜模拟昆虫的角质膜。昆虫的体表纤毛是一种柔性结构,可采用有机光纤模拟昆虫纤毛。本文设计的仿生纤毛传感器是一根直径为0.3 mm的光纤杆穿过厚度为0.2 mm的橡胶薄膜。光纤的根部和一个外径为2 mm的含液体芯PVDF球相连。整个传感器的结构和昆虫毛发感受器的结构基本相同,如图2所示。
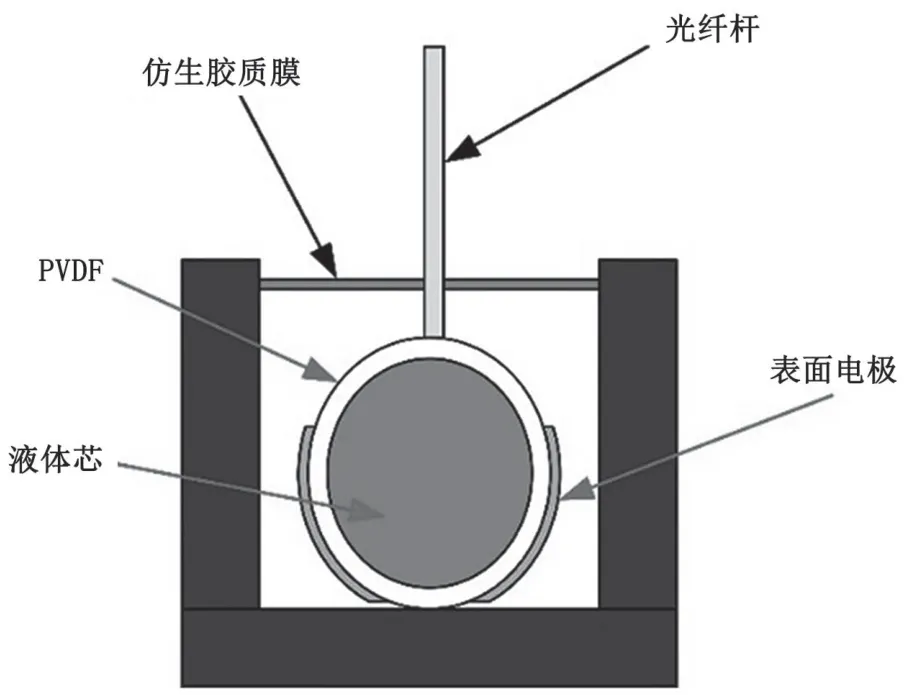
图2 仿生纤毛传感器结构图
3.3 功能验证
将仿生纤毛传感器放置在气流场中,光纤柔性杆在外部气流作用下产生弯曲变形。通过仿生角质膜的力传递作用后,仿生神经元的壳体产生变形。由于内部液体具有体积不变的特点,仿生神经元下部将产生膨胀变形。同时,由于压电效应,内外电极将产生传感电荷。实验验证,仿生纤毛传感器的传感信号和外部的气流流速呈线性关系,即根据传感器产生的信号能够计算外部气流的流速。传感器的气流感知功能和昆虫纤毛感受器的感知功能完全类似。
仿生纤毛传感器的设计过程可总结如下。首先,分析仿生对象-生物体功能器官的组织、结构,研究其组织、结构和功能之间的关系。其次,选择具有和生物组织类似力学性能的材料。再次,从局部到整体模拟生物器官的结构,设计完整的仿生传感器结构。最后,将仿生传感器放置到和生物体相同的环境中,检验仿生传感器的工作过程和功能原理,测试其传感性能。
通过仿生传感器的实践教学活动,学生可通过课堂互动集思广益,学习“头脑风暴”这种创新设计模式和方法,同时了解“仿生机械设计”的基本方法,为“仿生学”的学习和应用打下基础。在创新设计过程中,工程问题解决方案大多可以从自然中获取灵感。学生在复杂机械系统的创新设计过程中,围绕机械所需材料、控制、驱动以及传感等功能要素,采用“仿生学”的设计方法和设计步骤,可以较快地完成创新设计任务。这有利于学生学习本课程,及时了解机械设计的专业前沿进展,培养仿生创新思维,为以后的工作和深入学习打下基础。
教师在这一教学活动中要积极营造学生主动参与课堂的氛围。在“仿生设计”教学活动中,学生参与意识明显增强。在课堂发言、资料查找、选题确定以及设计过程中,大部分学生能积极主动参与教学,并能和教师形成良好的互动。教师能指导学生进行设计活动,并从学生的奇思妙想中获得科研灵感,真正做到“教学相长”,是一种值得推广的创新机械设计内容和教学方法。
4 结语
在“机械创新设计”课程的教学实践过程中,利用仿生气流传感器的设计过程启发学生更好地理解设计流程。首先,确定仿生对象,分析生物体的材料特性、组织结构和功能原理,明确其结构和功能关系。其次,选用合适的材料和模仿生物体的结构进行仿生结构设计。最后,对设计的仿生结构进行功能原理分析和性能测试,验证仿生设计的效果。通过对仿生气流传感器的设计可以促进学生更好地领悟仿生设计的方法及步骤,提高课后自主学习能力和创新设计能力,更好地掌握机械设计领域中的现代化设计方法。
猜你喜欢
南京林业大学学报(自然科学版)(2022年3期)2022-11-29
自然杂志(2022年3期)2022-08-18
医学研究生学报(2021年4期)2021-12-02
临床与实验病理学杂志(2021年3期)2021-04-25
新世纪智能(英语备考)(2021年11期)2021-03-08
中国现代医药杂志(2020年10期)2020-12-14
中华皮肤科杂志(2019年5期)2019-06-24
中国生殖健康(2019年11期)2019-01-07
青少年科技博览(中学版)(2017年5期)2018-02-28
百科知识(2016年21期)2016-12-24
