
基于KUKA的八轴雕刻机器人工作站的设计
2023-01-06 13:07张朝彪孟德涛
现代制造技术与装备 2022年11期
刘 明 张朝彪 孟德涛
(济宁职业技术学院,济宁 272000)
随着人们物质文化生活水平和审美观念的提高,外形美观、结构复杂的各类雕刻品在日常生活中出现的频率越来越高,使得人们对雕刻加工提出了更高要求。许多行业的生产环节有着严格的雕刻要求,如矫形护具个性化定制行业需要制作对客户身体部位1∶1还原的模型,因难度大仍多采用手工雕刻的方法。目前,雕刻作业多采用人工雕刻或数控专机雕刻的方式。人工雕刻用时过长,人力成本过高,有损工人身体健康。传统的数控雕刻专机加工尺寸受限,灵活度不够,加工方式单一[1]。上述两种常见的加工方式无法同时满足大尺度、复杂、高精度、高效率雕刻作业的要求。
六自由度串联工业机器人具有较大的操作空间、较强的灵活性和高精度优点,在搬运、码垛、切割以及焊接等场合应用广泛,再配备相应的工装夹具和加工工具进行正确的配置和离线编程设计后,可以实现简单的雕刻作业[2]。为提升灵活性,扩大可达空间,方便更好地匹配雕刻加工工艺,通常采用变位装置来实现圆雕、镂空雕等复杂雕刻,可替代部分人工或进行数控专机难以完成的工作。通常双轴变位机比单轴变位机的效果更优。随着市场需求的不断扩大,在高精度和宽适用性雕刻场合,采用工业机器人配合变位机进行作业的情况越来越多。
1 雕刻机器人工作站的整体设计
本雕刻机器人工作站由一台六自由度串联工业机器人KUKA KR16、双轴变位机、雕刻电主轴、工装夹具、PLC、操作台、安全围栏、除尘装置及报警装置等组成,如图1所示。机器人控制柜通过旋转数字转换器(Resolver-to-Digital Converter,RDC)与工业机器人本体6个轴和变位机的2个轴连接,实现精准的位置控制并向其提供动力,整体构成八轴联动的机器人系统。PLC作为工作站的主站,通过Profinet与控制柜连接。操作台是人机交互触摸屏,通过与PLC通信控制工作站的启停和雕刻电主轴、安全围栏以及除尘装置的工作状态。夹具固定在双轴变位机的工件圆盘上,能够夹持一定尺寸范围内的胚料,具有一定的适应性。雕刻电主轴安装在机器人末端法兰盘上。
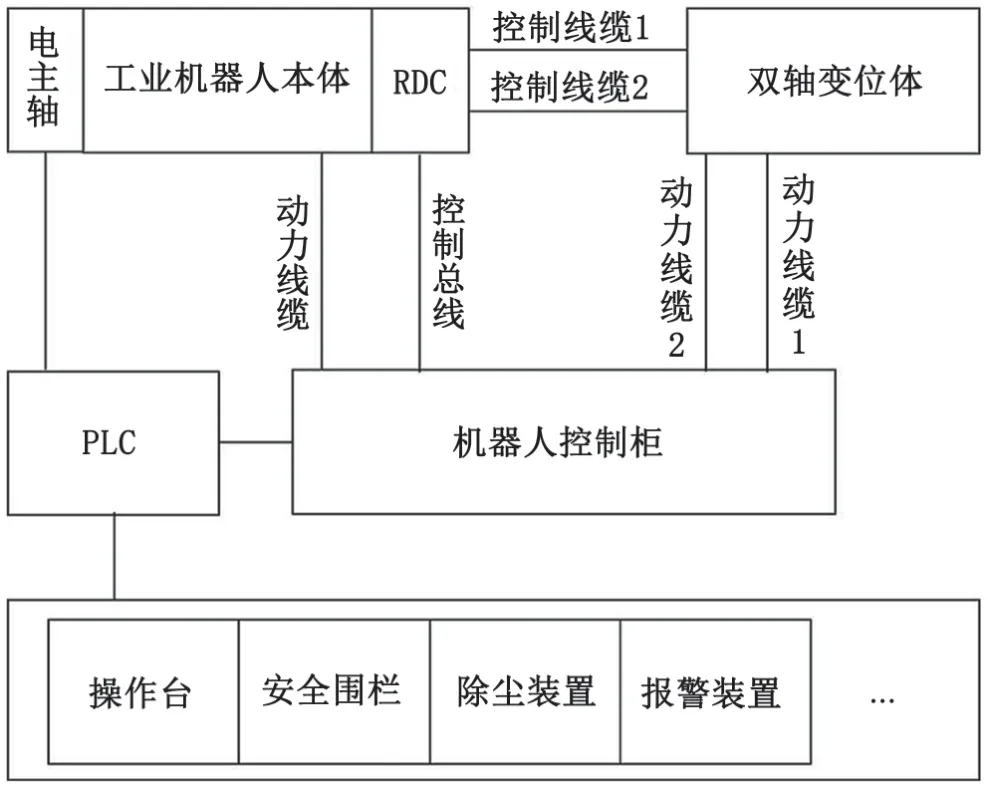
图1 雕刻机器人工作站整体结构
工业机器人KUKA KR16的工作范围适中,具有强大的驱动能力和高精度位置控制功能,保证了良好的动态特性。采用L形双轴变位结构的变位器,既保证了机器人的有效工作范围,又最大限度地提高了机器人的灵活性。针对不同的雕刻作业场合,可根据雕刻材质和大小选用其他型号的机器人以适配负载和尺寸要求。工作站机器人为坐地安装,根据需要可采用倒挂安装方式,在离线编程软件中正确设置参数。工作站采用密封式的驱动单元、管线和传动组件,保证了极高的实用性和可靠性。即使在恶劣的环境下,它也能保证机器人正常工作,且寿命长,故障率低。
2 双轴联动变位机的设计和工作原理
项目设计的双轴联动变位机由2套伺服电机和减速器组成,结构如图2所示。E1轴选用KUKA MGU 0800-118,5-ME_110伺 服 单 元,E2轴 选 用KUKA MGU 0420-118,5-ME_60伺服单元,两轴垂直放置。该单元采用免维护交流伺服电机驱动,使用无间隙的传动组件和绝对编码器,并配有刹车装置和温度监测安全装置。机器人控制柜选用KUKA C4标准柜,柜中有KUKA伺服包KSP和KUKA电源包KPP。除控制本体6个轴之外,装置还预留了2个轴的控制及驱动接口,用于控制及驱动变位机的2个轴。如果需要配置更多轴或为后续扩展留有余量,应考虑采用扩展控制柜,并增加KSP模块、KPP模块和RDC模块。

图2 双轴联动变位机结构示意图及坐标系统
当变位机处于初始位置时,变位机工件圆盘在上并与底座平行,此时两个轴的零点位置得以确定。变位机坐标系中:基坐标系{R}的原点位于变位机底座E1轴侧底边中点,Z轴竖直向上,X轴垂直于Z轴向右;坐标系{0}的原点选在E1轴与基坐标系Z轴的交点处,Z轴方向沿E1轴线向右,X轴取垂直于Z轴纸面向外方向;坐标系{1}的原点选在E1、E2轴的轴线交点处,Z轴的方向沿E1轴线向右,X轴取垂直于Z轴纸面向外方向;坐标系{2}的原点选在E2轴与工件圆盘平面的交点处,即圆盘平面圆心,Z轴方向为E2轴向上的方向,X轴取垂直于Z轴纸面向外方向。
根据建立的坐标系和变位机结构参数,可得表1变位机连杆参数。根据连杆变换公式可求得{i}相对于{i-1}坐标系之间的变换矩阵也容易得出坐标系{0}相对于变位机基坐标系{R}的变换矩阵及工作台坐标系{S}相对于坐标系{2}的变换矩阵

表1 变位机连杆参数表
机器人工作站的坐标系布局如图3所示。根据机器人本体与变位机的相对位置,可得变位机基坐标系{R}相对于机器人世界坐标系{B}之间的坐标变换矩阵坐标系之间构成联体坐标关系,变位机工作台坐标系{S}相对于机器人世界坐标系{B}的变换矩阵由于机器人为串联结构,可得机器人工具坐标系{T}相对于机器人世界坐标系{B}的变换矩阵可计算得出工具坐标系{T}相对于变位机工作台坐标系{S}的变换矩阵这样能够计算出机器人所夹持工具相对于目标(加工模型)坐标系的位姿。
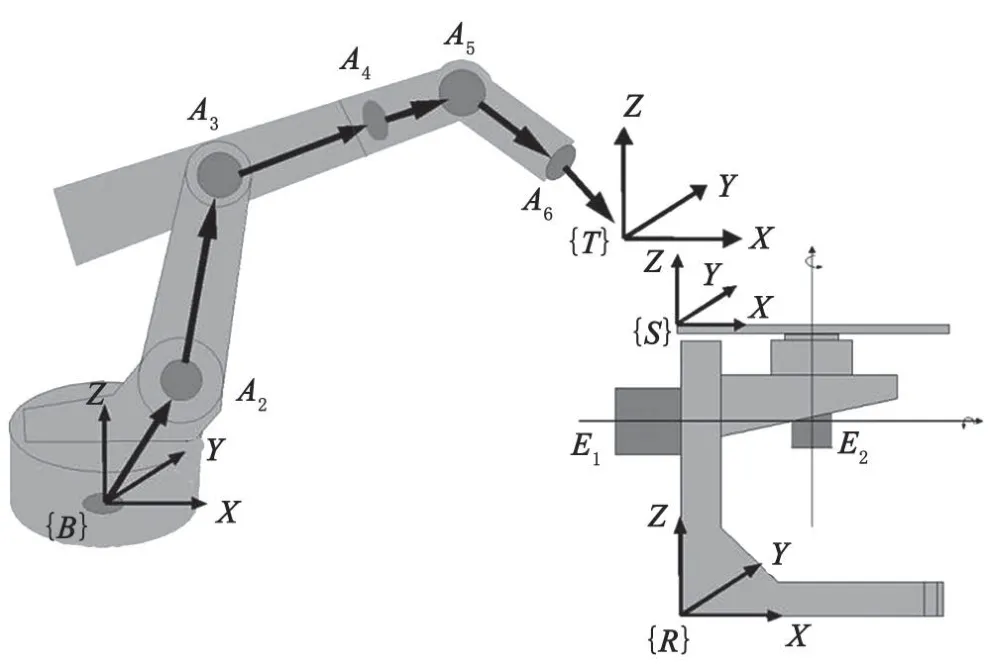
图3 雕刻机器人工作站坐标系
3 雕刻机器人工作站的控制系统设计
雕刻机器人工作站的双轴联动变位机要和机器人本体实现八轴联动,需要在KUKA机器人配置软件Workvisual中组态,并在硬件层面将接口对应连接。Workvisual中坐标转换设置如表2所示。
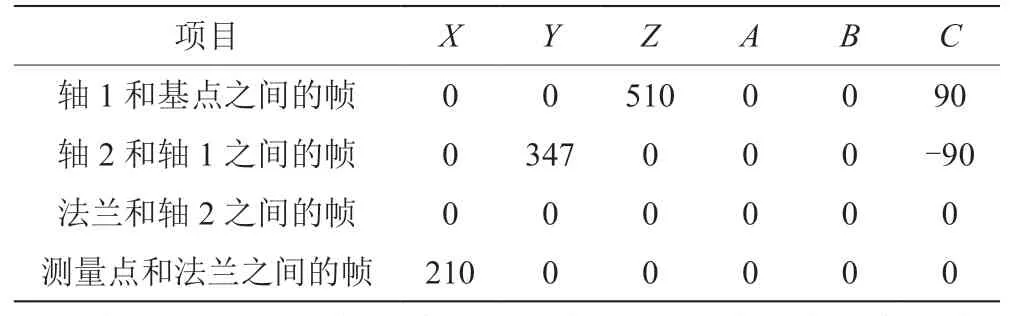
表2 Workvisual中坐标转换参数设置
机器人控制柜、机器人本体和双轴联动变位机连接的拓扑结构,如图4所示。雕刻机器人工作站的机器人本体与变位机之间,采用机器人控制柜原有的控制和驱动方式。由于机器人标准控制柜KPP、KSP和KDC控制盒可驱动8个轴,无需扩展额外的模块,只需采用专用线缆将各模块与变位机伺服驱动单元连接即可。机器人控制柜通过RDC实现对8个轴的位置控制。控制柜的专用接口为8个轴提供动力。

图4 雕刻机器人工作站系统拓扑结构
为保障雕刻作业的操作便捷和安全性,工作站设置了人机交互界面、安全防护装置以及除尘装置等。系统要合理控制各组成单元,解决各组成单元之间的信息交互问题,以实现协调运行。雕刻机器人工作站操作台以西门子S7-1200系列PLC作为主控设备,其中工作站启动、安全防护、报警显示以及加工工具等各功能元件通过输入/输出(Input/Output,I/O)接口与PLC交互。PLC与雕刻电主轴通过I/O接口连接,当PLC接收到触摸屏开机信号后,安全防护装置和雕刻电主轴依次启动,调用机器人程序,驱动工作站开始雕刻,触摸屏显示雕刻进程[4]。主站PLC与从站机器人控制柜通过Profinet实现主从站间的通信。在外部自动运行时,PLC对机器人运行状态进行数据监控、程序选择以及故障诊断,具有实时传输通信信息和传输速率高的优点,增强了各装置间的协调合作性,提高了生产效率与系统安全性。
4 雕刻加工程序及工程实现
因雕刻加工路径复杂、加工方式多样以及加工工艺要求高,无法采用传统示教方式,一般采用离线编程方式。雕刻作业前结合产品的位置关系、数模信息、加工参数及工艺流程等信息,合理编写加工程序并进行仿真,生成可靠的机器人可执行程序,再导入机器人使之能够按照该加工程序自动雕刻工件胚料。以四面圆雕加工为例,简要说明其雕刻加工程序的设计思路。坯料应大于且包裹拟要加工的模型,底部预留台座。一般来说,坯料相对模型成品的尺寸至少大于1 mm,坯料最大尺寸取决于机器人工作空间和刀具长度,加工精度为±0.01 mm。
加工前,先对需要雕刻的产品模型进行离线编程,生成机器人可执行程序存入机器人控制柜,坯料上料由人工完成。当启动雕刻机器人工作站后,操作员选取机器人可执行程序,启动防护装置和雕刻电主轴,机器人进入雕刻环节。机器人系统执行程序对坯料进行精准雕刻,使机器人处于自动运行状态。工作站先完成四面粗雕,随后完成旋转精雕。主要加工工艺规划和生产流程为人工放坯料→工作站启动→变位机变换坯料第一面进行粗雕加工→变位机变换坯料第二面进行粗雕加工→变位机变换坯料第三面进行粗雕加工→变位机变换坯料第四面进行粗雕加工→变位机旋转坯料进行旋转精雕加工→加工完成后人工取下成品。雕刻期间,人机界面同步显示雕刻程序和作业进度,待雕刻作业结束并处于安全状态时,显示装置提醒操作员将成品取下。除了坯料上料和成品取料由人工完成外,整个雕刻过程均由雕刻机器人工作站完成。根据任务复杂程度的不同,雕刻加工时间不一,但在不同加工层面的切换工序上相较传统雕刻方式节省了时间。
5 结语
随着工业生产自动化程度的不断提高,国内的生产模式正逐渐向自动化和智能化生产方式转变,使得PLC和工业机器人扮演着愈来愈重要的角色。随着它们的需求量和应用领域的不断扩大,技术研究与发展也越来越深入,不断提高整个社会的生产效率与产品质量[5]。设计开发的基于PLC和KUKA机器人的雕刻机器人工作站,自动化程度高,雕刻精度高,适用范围广,可以完成石膏、木材、有机塑料及石材等材质的雕刻,只需要技术人员进行工程设计,加工制造阶段可以做到无人值守,极大地解放了人力,提高了加工质量和生产效率,具有较高的推广应用价值。此外,配合3D扫描技术,构建3D模型,雕刻机器人工作站在仿古复原、个性化定制、精密造型等领域同样具有广阔的应用前景。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
交通科技与管理(2022年8期)2022-05-07
机械工程师(2022年3期)2022-03-24
商品与质量(2021年4期)2021-11-23
湖南电力(2021年1期)2021-04-13
润滑与密封(2019年8期)2019-08-27
中国特种设备安全(2019年4期)2019-05-20
现代职业教育·中职中专(2018年7期)2018-05-14
凿岩机械气动工具(2017年3期)2017-11-22
现代交际(2017年19期)2017-10-23
