
车载激光雷达测量技术及设计分析
2023-01-06 13:09翟志方吴沛航
现代制造技术与装备 2022年11期
翟志方 吴沛航
(信阳职业技术学院 汽车与机电工程学院,信阳 464000)
无线电通信技术的迅速发展,提高了计算机处理能力,逐步完善了相应的系统结构。一种新型测量技术——激光雷达,使得快速、准确、实时化的采集和处理海量的三维数据成为可能。车载激光雷达技术结合了激光扫描、全球定位系统、惯性导航系统以及摄影测量等多种技术形式,是一种新兴的空间测量技术。这项技术的应用能够帮助人们更精准地获取地表三维空间信息,打造一个立体化的数据分析模型。为了能够更好地发挥车载激光雷达测量技术在人们实际生活中的作用,文章主要针对车载激光雷达技术的设计问题展开探究。
1 车载激光雷达概述
1.1 内涵
车载激光雷达是一种集激光、全球定位系统以及惯性导航系统3种技术形式为一体的空间测量系统。车载激光雷达系统包含激光扫描仪、全球定位接收机、惯性导航系统及数码控制元件等[1]。这些系统被统一安装在载体汽车上,在使用过程中通过主动向外界发射激光脉冲,接收外界反射回来的反射脉冲来记录机械运作需要的时间,全面了解激光扫描仪到达周围事物的距离,并结合定位定向系统(Position &Orientation System,POS)测量周围事物的三维坐标。与传统的摄影测量系统相比,激光雷达系统能够直接获取三维立体数据信息,且在一定程度上缩短了数据信息获取到应用的时间和流程。
车载激光雷达系统的设计包含3个主要的零部件,分别是车载激光扫描仪、数码相机以及定位定向系统。在整个系统的运作中,车载激光扫描零部件的设计和应用需要全面收集三维激光点的云数据,在收集数据信息的同时及时测量周围事物形态,全面了解周围事物的回波强度和波形。车载激光雷达系统中的数码相机用来拍摄周围影像数据和POS系统测量设备在某一个瞬间的位置和姿态,利用全球定位系统确定空间位置。
1.2 特点
车载激光雷达采用先进的空三定位技术。第一,它集成了全球定位系统和惯性导航技术,在导航系统的作用下能够精准化物体的空间位置。第二,获取的数据信息密度高。车载激光点云数据信息由激光直接测量获取,理论上的精准度达到0.15 m,最高程的精准度可以达到0.10 m。第三,具有较强的穿透外界事物的能力。车载激光雷达系统在多次回波操作后,当任何一个激光穿越周围事物时都会相继返回周围事物等多类高程数据信息,在对外界事物测量的过程中最大限度地确保了信息的真实、准确。第四,数据测量不会受到阴影和太阳光线的影响。车载激光雷达系统采取的是主动的激光测距方式,测量操作不依赖自然光,且测量数据的精准度不受太阳光线、周围事物的阴影等影响。
1.3 应用优势
车载激光雷达的应用优势体现在以下几方面。第一,成果测量精准度高。在车载激光雷达航测技术的作用下,人们能够直接获取三维激光点云数据信息。与传统测量仪获取信息相比,整个操作流程更加简洁方便。三维激光雷达系统获取新的原始点密度要比传统测量仪获取原始点的密度高,平均每平方米能够获取几十个原始数据点,远超其他系统[2]。
在应用车载激光雷达航测技术后的高程测量精准度要比其他测绘方式获取的测量精准度高,由此在测量的过程中会获得更全面的周围事物数据信息。第二,生产效率高,工作时期短,内部智能化、自动化水平较高。具体操作中能够综合应用三维激光点云数据信息,一定程度上提高了测量工作效率。第三,测量成果质量高。三维激光雷达系统在操作现场使用时能够快速直接地获取各类成果数据,弥补传统测量仪在现场无法获取原始成果信息质量的问题[3]。
2 车载激光雷达数据的精化处理方式
2.1 临近波形激光测量全波形数据分析
在数据信息测量过程中,为能够解决周围事物点回波信号弱而难以测量的问题,项目在实验操作时提出一种临近波形信息的车载激光波形数据分解算法,在试验区域范围内选取4块长宽为100 m的区域进行试验分析。波形分解试验区图解,如图1所示。

图1 波形分解试验区图
2.2 激光点云获取实施方案
2.2.1 基本作业流程
车载激光雷达系统的使用重点包括激光点云数据采集和POS定位数据采集。其中,POS定位系统的数据信息深刻影响三维激光点云数据信息的精准度,能够为车载激光雷达系统的运作提供精准的云数据信息支持。
2.2.2 数据处理流程
车载激光雷达系统数据处理的基本内容包含点云数据信息、POS数据信息等。在获取这些数据信息后需要应用自主研发的自动化信息软件进行处理。对数据信息进行优化处理后,可得到配单线路巡检一系列报告结果生成系统巡检报告。点云数据处理整体流程如图2所示。

图2 点云数据处理整体流程
2.2.3 激光雷达数据分析
在实际作业完成后得到基本原始数据,具体包含POS文件和GPS坐标信息。点云文件包含激光点云[4]。在获取这些数据后,应用专业的系统分析软件进行处理,得到每个激光点云相应的精准三维GPS坐标,依据全球定位系统坐标获取杆塔的精确位置。
为了通过三维激光点云实现汽车装置轨迹自主规划,需要对三维激光扫描作业获取的数据进行进一步处理。三维激光扫描作业数据处理流程如图3所示。
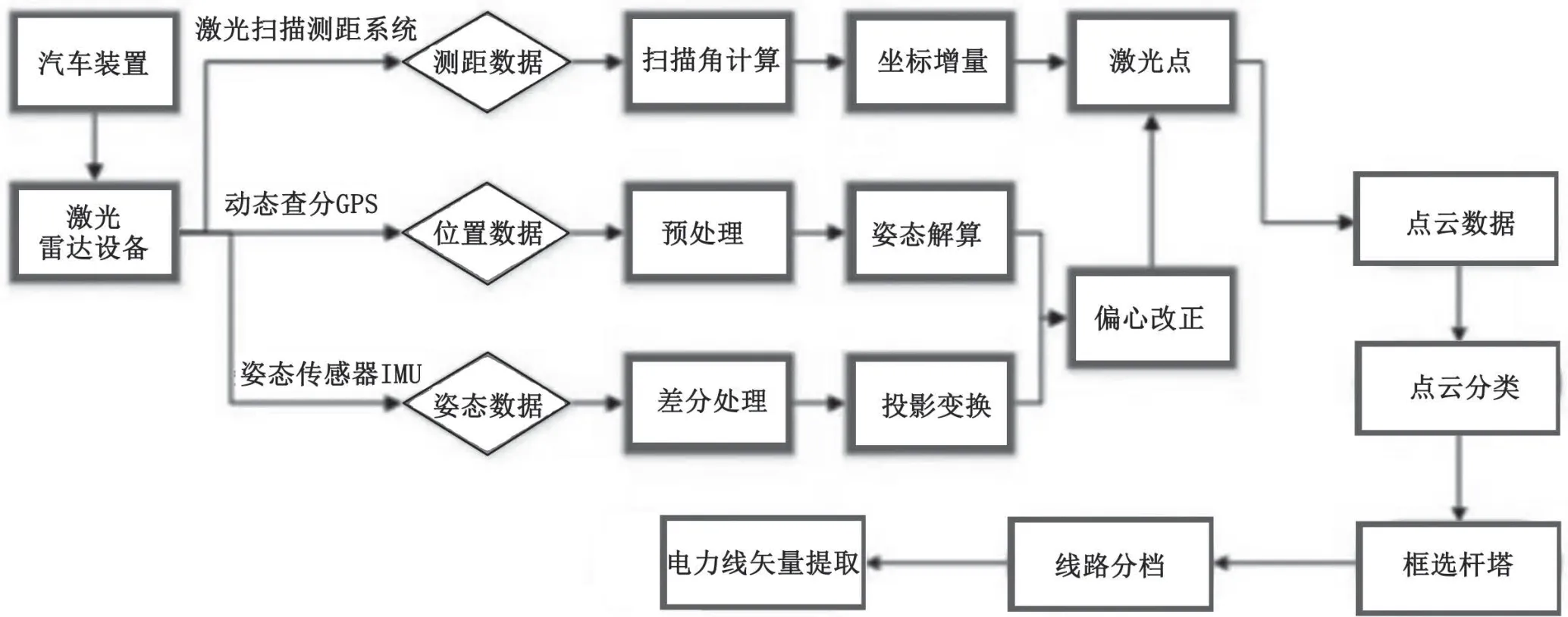
图3 三维激光扫描作业数据处理流程
3 车载激光雷达测量技术的应用发展
从20个世纪50年代到20世纪70年代中期,以原子能技术、电子计算机、空间技术和生物工程为代表的“第三次科技革命”到来,对人们的生活生产产生了深刻影响。伴随着国家信息高速公路思想理念的提出和以信息技术应用为基本代表的第四次科技革命时代的到来,人类正式进入信息时代[5]。在信息时代,人们对赖以生存的空间——地球予以了高度重视,提出了地球空间信息科学,并成为现代科学领域研究和发展的重要组成内容。
过去获取地球空间信息的重要方式是摄影测量,而数字时代摄影测量也开始从模拟测量转变为数字测量,大大提高了摄影测量的数字化程度。在无线电通信技术的不断发展下,计算机处理能力和相应系统结构不断完善,激光雷达为人们获取信息提供了更精准的数据信息支持。
4 结语
文章就车载激光雷达测量技术的原理、特点和应用优势问题进行论述。从临近波形激光测量全波形数据分析、激光点云获取实施、激光雷达数据分析几个方面分析车载激光雷达数据的精化处理方式,旨在强化人们对车载激光雷达测量技术的了解,以便更好地发挥此技术的作用。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车实用技术(2022年10期)2022-06-09
汽车观察(2021年8期)2021-09-01
铁道通信信号(2020年8期)2020-02-06
当代陕西(2020年24期)2020-02-01
汽车维修与保养(2019年3期)2019-06-19
铁道通信信号(2019年3期)2019-04-25
中国交通信息化(2019年1期)2019-03-26
安阳工学院学报(2018年6期)2018-11-28
电子制作(2018年16期)2018-09-26
