
基于视频识别和UWB定位的变电站作业现场安全识别方法
2023-01-05 03:45李金鑫陈家辉陈超人郜晓娜
电气技术与经济 2022年6期
李金鑫 徐 润 陈家辉 陈超人 郜晓娜
(贵州电网有限责任公司遵义供电局)
0 引言
随着电网的迅猛发展,现阶段变电站施工或者检修作业的工作量逐渐增多。施工单位的管理疏忽以及相关作业人员安全意识缺失等因素,都是造成变电站作业现场出现安全隐患的原因。而作业现场的安全问题不仅影响电网的稳定运行,甚至严重威胁作业人员的生命安全。当下有众多学者对此课题进行相关研究,常政威等通过图像识别方法结合机器学习技术,开展电力作业现场人员的安全识别研究[1];郭宇等通过融合注意力机制结合深度学习技术,实现电力安全作业实体的有效识别[2]。但是上述变电站作业人员识别方法在实际应用中,存在识别精度较低的不足,为变电站运维以及安全管理增加了困难。
为了解决这一问题,本文基于视频识别和UWB定位技术,针对变电站作业现场安全识别进行深入研究,以期提高作业现场的安全管理水平。
1 划分变电站区域
变电站作业现场安全识别的原理是按照一定条件把变电站区域实现最小化划分,然后通过远程监控等形式从各个子集区域中筛选出作业人员等信息,根据安全判定规则来判断人员活动的安全风险。变电站内部区域包含运输与行走的通道、变电设备等,所以本文通过通道区、设备区、所属间隔等区域特征进行变电站区域的最小化划分。利用变电站的各区域属性,获取变电站区域数学模型:

式中,S表示变电站的整个内部区域;Ss表示变电站内全部设备的安全范围区域;St表示变电站内的全部通道区域;S500、S220、S35分别表示变电站内500kV、220kV、35kV电压区域;Sz表示变电站内的主变设备区域。由式(1)和式(2)可知,根据变电站各区域属性划分的最终结果,其实就是把变电站整体区域转换成多个单独小区域的集合,且这些子集区域彼此之间存在联系但又有一些属性不同。当有子集区域具有多个不同属性时,该子集在变电站全部区域的集合中呈不同层级的逻辑从属关系。根据此模型对变电站区域进行最小化划分,获取的每个子集区域都是最小单元,不用再根据功能区别再次划分,然后根据区域属性区别,配置不同的安全风险识别装置,以此实现对整个变电站作业现场的高效安全识别。
2 基于UWB定位作业人员
UWB[3]历史悠久,一直受世界瞩目,由于它用冲击脉冲取代载波传输数据,定位精度较高且抗干扰能力较强,所以本文引入UWB技术,实现对变电站作业现场的人员定位。变电站作业现场的安全识别主要体现在,作业人员的穿戴是否符合施工要求、作业人员是否在指定区域范围内进行施工、作业人员的行动轨迹是否在安全距离内等,而这些要求的前提就是对作业人员的精准定位。UWB定位原理就是测距与测向,且有三种不同形式的定位,根据两个测量点接收信号到达的角度获取发出信号的位置,这种定位形式易受多径效应影响出现误差;根据信号强度来获取信号发出点的距离,这种定位形式易受衰减或遮蔽效应的影响出现误差;根据三个测量点曲线到待测点的常数距离来定位,这种定位形式不用三个测量点接收作业人员信号的时间一致,只要保证三个参考点的时间同步就行,精度较高,最为常用,所以本文通过此方法实现变电站作业现场人员定位。设作业人员位置坐标为(x,y),那么:
式中,r1表示测量点1到作业人员的距离数据;r2表示测量点2到作业人员的数据;r3表示测量点3到作业人员的距离数据;x1与y1分别表示测量点1位置的横纵坐标数据;x2与y2分别表示测量点2位置的横纵坐标数据;x3与y3分别表示测量点3位置的横纵坐标数据。并且式(3)可以简写为:

设测量点1为基础测量点,距离差公式为:

式中,rn,1表示测量点2/3到作业人员距离与测量点1到作业人员距离的差值。结合式(4)可以得到:

由于式中x、y、r1是未知数据,所以此式可以转化为线性方程组,以此实现对(x,y)的求解,获取作业人员位置。通过UWB对变电站作业人员进行定位跟踪,保障变电站作业现场安全。
3 提取视频图像中人员行为特征
在定位到作业现场的人员之后,接下来需要做目标分割[4],将视频图像中人员行为特征提取出来,以便判断作业是否安全。首先在原始视频图像中提取出作业人员的原始真图,如果由于摄像机没有水平设置出现图像倾斜的情况,需要先水平调整视频图像,通过连通技术获取每个独立连通图块的质心:

式中,xz、yz分别表示质心的横纵坐标数据;w表示连通图块的宽度数据;h表示连通图块的高度数据;(x,y)表示图块像素点位置坐标;f表示形状函数。然后通过Hough变换技术获取将连通图块的倾斜趋势,利用倾斜方向和垂直方向的夹角,将连通图块质心坐标进行旋转操作,直到夹角为0停止旋转,此时获得水平的视频图像。通过灰度转换公式将彩色的视频图像变为灰度图像:
式中,R、G、B分别表示图像像素的RGB颜色分项数据。再将灰度的视频图像进行二值化处理,二值化效果将直接影响图像特征提取的效果,已经二值化的图像需要去除图像中多余的干扰,对图像中人员粘连、重叠等情况做分割处理,按照设定的阈值,将连续大于设定值的区域找出来,就可以获取作业人员水平方向的真实投影,一般情况下变电站作业人员呈站立姿态,通过水平投影法,可以将图像中人体分离,以此实现视频图像中人员行为特征的提取。
4 检测作业人员行为安全
变电站作业现场的人员安全行为检测属于多目标的检测工作,通过对作业人员的防护穿戴、行为动作和变电站设备等多个目标的检测,来判断变电站作业现场是否存在安全隐患。本文使用YOLOv3方法[5]进行检测安全,此方法属于单步目标检测方法,可以实现较高精度的小目标检测,所以需要将视频中的作业人员行为安全分成两个小的检测目标,首先将作业现场摄像头拍摄的视频进行解码操作,每隔50帧就抽取一帧图像,通过文中上述内容将该帧图像中的人员行为特征提取出来,先进行作业人员的防护穿戴的安全检测,如果正常检测到作业人员佩戴安全帽、防电手套等防护工作服,那么判定为合规作业;如果未检测到作业人员佩戴安全帽、防电手套等防护工作服,那么判定为不合规作业。再进行人员作业行为的检测,通过检测人员与危险区域的距离,判断作业是否合规,检测的数学模型为:
5 评估作业风险程度
在变电站作业现场的安全识别中,关键的步骤就是对安全风险程度进行评估,将作业现场的危险性进行定性处理,便于作业团队及时管理控制相关风险,保护变电站作业现场安全。为此本文引入格雷厄姆风险评估法:

式中,D表示变电站作业现场的风险程度定性值;L表示作业现场出现危险的可能性;E表示作业人员处于危险区域的频率;C表示作业现场出现危险的严重性。如果变电站作业现场出现安全问题,并且出现作业人员的伤亡或者变电设备的损失,就可以将风险值定位在1~100之间,其中人员普通外伤与设备运行一般异常情况下,风险值为1,而人员死亡与特大设备事故情况下,风险值为100,通过风险值就可以获取该变电站区域出现危险的严重性。由于L、E、C这三个数据会随着变电站的实际作业环境而发生改变,所以不能直接用此处的D数据来表示作业的风险程度,还应该考虑到作业现场中风险程度的半定性值,半定性值就是不具备量纲的数据,此数据对作业风险程度也有一定的参考意义。所以本文结合格雷厄姆风险评估法,在变电站作业现场的安全识别时,通过获取单一作业风险的平均值来定性风险程度,计算公式如下:
式中,Duv表示变电站作业现场中的第v个单一作业在第u步时出现危险时的风险值;i表示作业现场的单一作业总数;j表示单一作业的全部步骤数量;N表示变电站作业现场中包含的危险总数。根据此公式来获取变电站作业现场的风险数据,可以科学合理地展示作业风险程度,当风险值在5~60范围内,定义为一般危险;当风险值在60~85范围内,定义为较大危险;当风险值超过85,定义为特大危险,然后施工管理人员根据此风险程度,及时制定应对策略。
6 实验验证
6.1 人员定位精度的对比
在本文所提的变电站现场安全识别方法中,两个关键指标分别是人员定位精度与人员安全行为检测准确度,所以为了验证本文方法的有效性,进行与传统方法的对比实验,通过对比结果判断本文方法的效果。本次实验选取35个作业人员,首先将他们安置在35个不同且固定的坐标位置处,利用本文方法与传统方法分别对其进行定位,定位结果如下图所示。
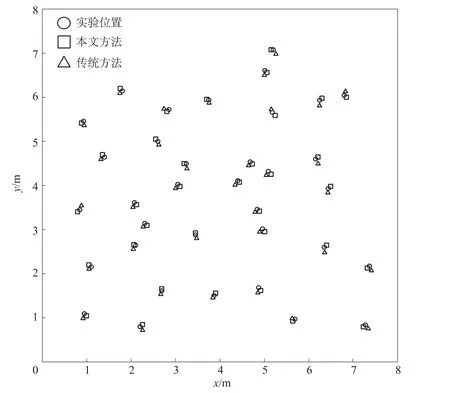
图 定位结果对比图
由图可知,传统方法的定位结果平均误差为11.77cm,而本文方法的定位结果平均误差为10.63cm,较传统方法小1.14cm,说明本文方法的人员定位精度更高。
6.2 人员安全行为检测准确度的对比
在这35个作业人员中随机挑选一定数量的作业人员佩戴安全帽,利用本文方法与传统方法分别进行人员安全行为检测的对比实验,调用检测网络识别作业人员是否佩戴安全帽,然后人工统计出两种方法的识别准确率,其结果如下表所示。

表 检测作业人员安全帽佩戴结果表
由此表可知,传统方法的人员安全行为检测准确率仅有80.11%,而本文方法的人员安全行为检测准确率有93.37%,较传统方法提高13.26%。由此验证本文所提基于视频识别和UWB定位的变电站作业现场安全识别方法是有效方法,且识别准确性较高。
7 结束语
本文在对变电站作业现场安全识别中,添加视频识别及UWB定位技术,实现对现场作业人员的安全监测,并且UWB技术可以适应变电站的复杂环境,精准定位作业人员,加强安全识别的准确性。但由于目前UWB定位技术未被我国大面积使用,导致UWB产品的价格较高。所以今后本文的安全识别方法还需要进一步优化与完善,在保证识别精度的同时,节约成本,对提高电网安全具有重要意义。
猜你喜欢
航空学报(2022年5期)2022-07-04
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
模具制造(2019年10期)2020-01-06
中国外汇(2019年20期)2019-11-25
科学导报·科学工程与电力(2019年5期)2019-10-20
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
