基于GA-ACO优化BP算法的齿轮箱初期故障诊断研究
2023-01-03 01:52:20庞晓霞
中国工程机械学报 2022年6期
庞晓霞,王 强,张 峰
(1.郑州城市职业学院智能制造学院,河南 郑州 452370;2.河南科技大学信息工程学院,河南 郑州 452370;3.河南新志通信工程有限公司技术部,河南 荥阳 450100)
齿轮箱在动力传输部件中获得广泛使用,可以快速完成传输载荷和转速的精确调节,对于保障机械传输结构的控制性能发挥了重要作用[1]。考虑到齿轮箱通常需承受高载荷的高速运行工况,面临恶劣的外部环境,极大提高了故障概率,也是造成机械设备运行故障的关键原因。对机械运行过程产生的各类故障进行统计分析发现,接近15%的故障都是由齿轮箱引起的。为确保机械部件运行安全性,越来越多的学者都开始关注齿轮箱故障诊断方面的新技术开发,对提升工业动力系统整体控制性能也具有较大意义。
赵艳丽等[2]则在齿轮箱故障诊断过程中加入了模糊关联的方法,同时根据隶属函数获得每个参数隶属度数据,能够准确识别出齿轮箱发生表面磨损、局部点蚀、组织交联或断齿等故障问题;Liu 等[3]通过粒子群优化算法确定信号特征,经测试发现该算法可以实现故障的高效诊断;杜设亮等[4]提取得到10 种故障参数,同时建立了组织体系BP 算法,可以准确诊断齿轮箱产生的4 类主要故障;王凯等[5]选择小波神经网络的处理方法诊断齿轮故障;Chen 等[6]同时利用粗糙集理论和神经网络进行信号数据处理,可以高效诊断出旋转机械运行故障特征;艾利等[7]开发了一种以GA 与BP 算法对故障进行快速分析的新算法,同时设置权值与阈值作为自变量,经迭代计算获得最优解,达到训练BP 算法的效果,能够精确诊断齿轮箱故障问题。
为了同时提升算法处理精度及收敛效率,本研究针对BP算法实施优化,设计得到一种通过GA-ACO方法对BP算法优化算法。根据蚁群算法确定神经网络的最优权值与阈值,再利用上述优化结果组成BP算法,并诊断不同结构齿轮箱运行故障信号。相对蚁群优化神经网络,GA-ACO优化BP可以更加准确诊断故障,并缩短了处理时间。
1 齿轮箱振动特征分析
1.1 齿轮箱振动机理
齿轮箱发生振动时呈现明显的非线性运动特性,需要构建复杂的振动模型。为了更高效分析齿轮箱振动作用机制,需建立简化结构的齿轮副模型[8],从而便于分析齿轮箱故障。简化模型的具体结构如图1所示。
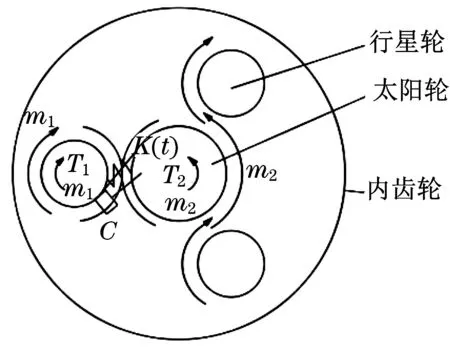
图1 齿轮运动模型Fig.1 Schematic algorithm of gear motion model
将模型运动过程表示成以下的形式:

式中:M为等效质量,M=m1m2/(m1+m2);C为啮合阻尼;x为齿轮运行位移;k(t)为啮合刚度;E1为静弹性变形;E2(t)为故障函数。
1.2 齿轮箱信号分析
根据齿轮箱振动信号判断运行状态,可获得比其他故障判断方法更高效的结果。通过振动信号诊断齿轮箱故障前,需从振动信号内选择有价值的特征信号。为满足以上要求,需对齿轮箱振动信号分别从时域与频域2个层面开展全面分析。
结合前期研究结果可知,在出现初期故障的情况下,受到峭度与裕度的显著影响,而当故障经过一段时间推移后,出现了稳定性降低的现象。峰值与偏态指标虽然在初始阶段不具备较高的敏感度,但可以保持良好稳定性。利用上述特征共同诊断故障时,有助于模型达到更高的故障识别准确率。
不同频率下的变化幅值与相位参数不同,频域特征指标包含相关因子与谐波因子,具体计算公式如下:
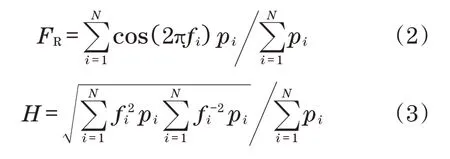
式中:fi为i时刻功率谱频率;pi为i时刻功率谱变化幅度。
2 GA-ACO优化BP算法
第1 步利用GA 算法进行寻优计算,获得BP算法的最优权值与阈值;然后,对信息素分布实施初始化,使优化解路径上形成更高浓度的信息素,促使ACO 搜索过程获得更快收敛速率并提升结果精度。
根据如下公式完成信息素初始化:

式中:τG为经过GA 寻优处理得到的信息素浓度;c为信息素恒定值。
第2 步以GA-ACO 对BP 算法优化的过程如下:
首先,对BP 算法与蚁群参数实施初始化;然后,S只蚂蚁进行信息素的数据搜索与更新。由蚂蚁确定之后的节点,直至所有蚂蚁搜索过程结束。搜索过程中,蚂蚁可以通过如下公式对各边信息素实时更新:

式中:P为信息素挥发系数;Δτj为在j元素路径上产生的信息量。
第3 步将遗传算法融入蚁群算法中。完成蚁群的交叉与变异计算后,得到新个体计算式:

式中:x为蚁群的后一路径节点。
利用式(6)得到适应度,并判断是否符合最优解条件。当结果符合时将其代到第4 步,反之则代到第2步。

第4 步根据上述蚁群算法寻优所得的结果对BP算法进行训练,得到误差e,存在以下关系:

式中:Oq为期望值;Yq为预测结果;q为神经元数量,q取值为1,2,…,n。
第5 步结合上一步结果对BP 算法权值与阈值进行更新,分析结果是否符合要求。当结果符合判断条件时算法结束,并确定故障特征;反之跳转到第4步。
GA-ACO优化BP算法流程如图2所示。
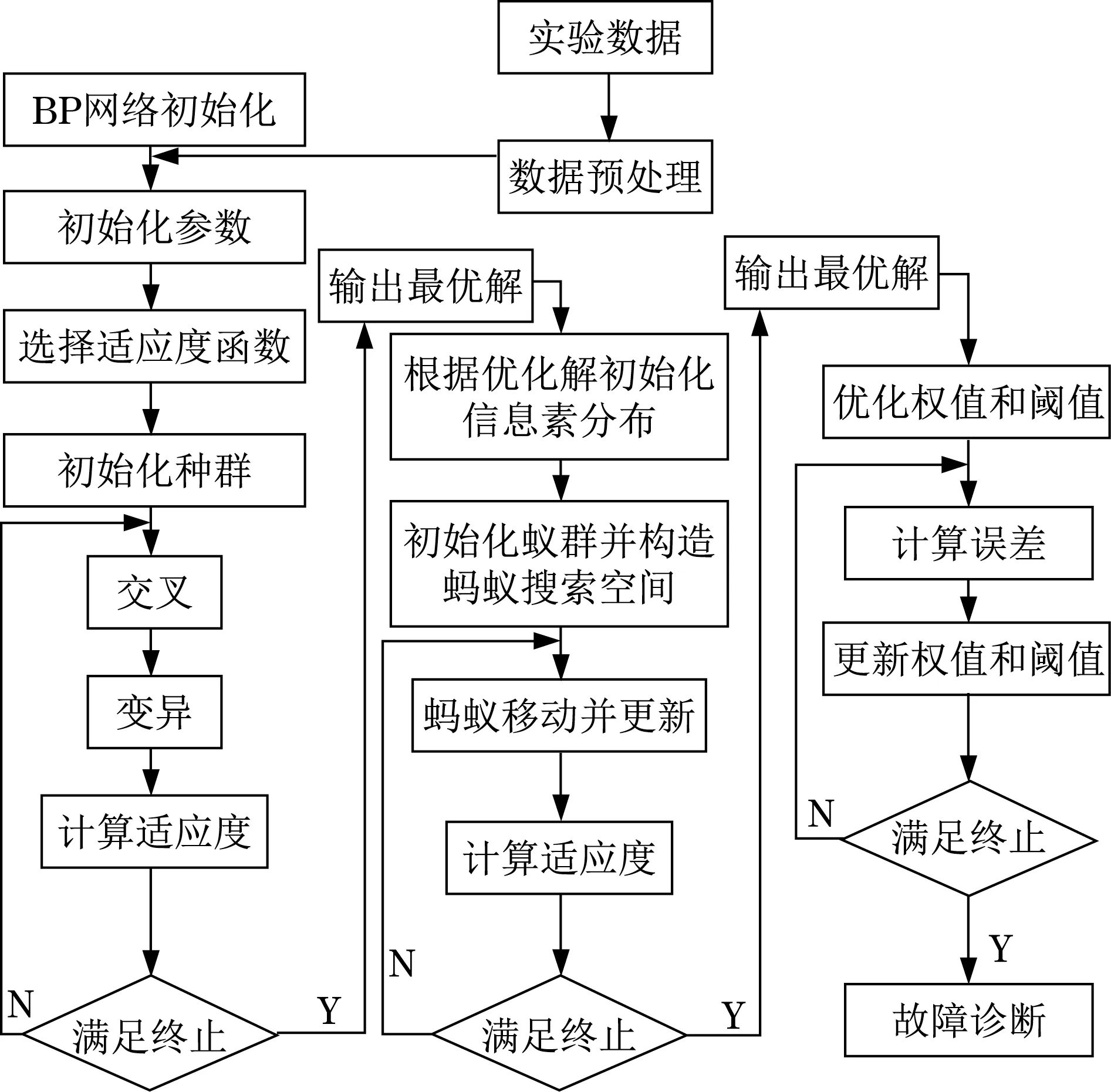
图2 GA-ACO优化BP算法流程Fig.2 Flow chart of GA-ACO optimization BP algorithm
3 实验结果分析
3.1 实验方案
本研究从某故障诊断平台上采集各项故障数据,分别测试了点蚀、表面磨损、断齿与正常运行参数。测试平台与故障测试过程如图3所示,测试得到的初始信号如图4所示。

图3 实验现场示意Fig.3 Schematic diagram of experiment site
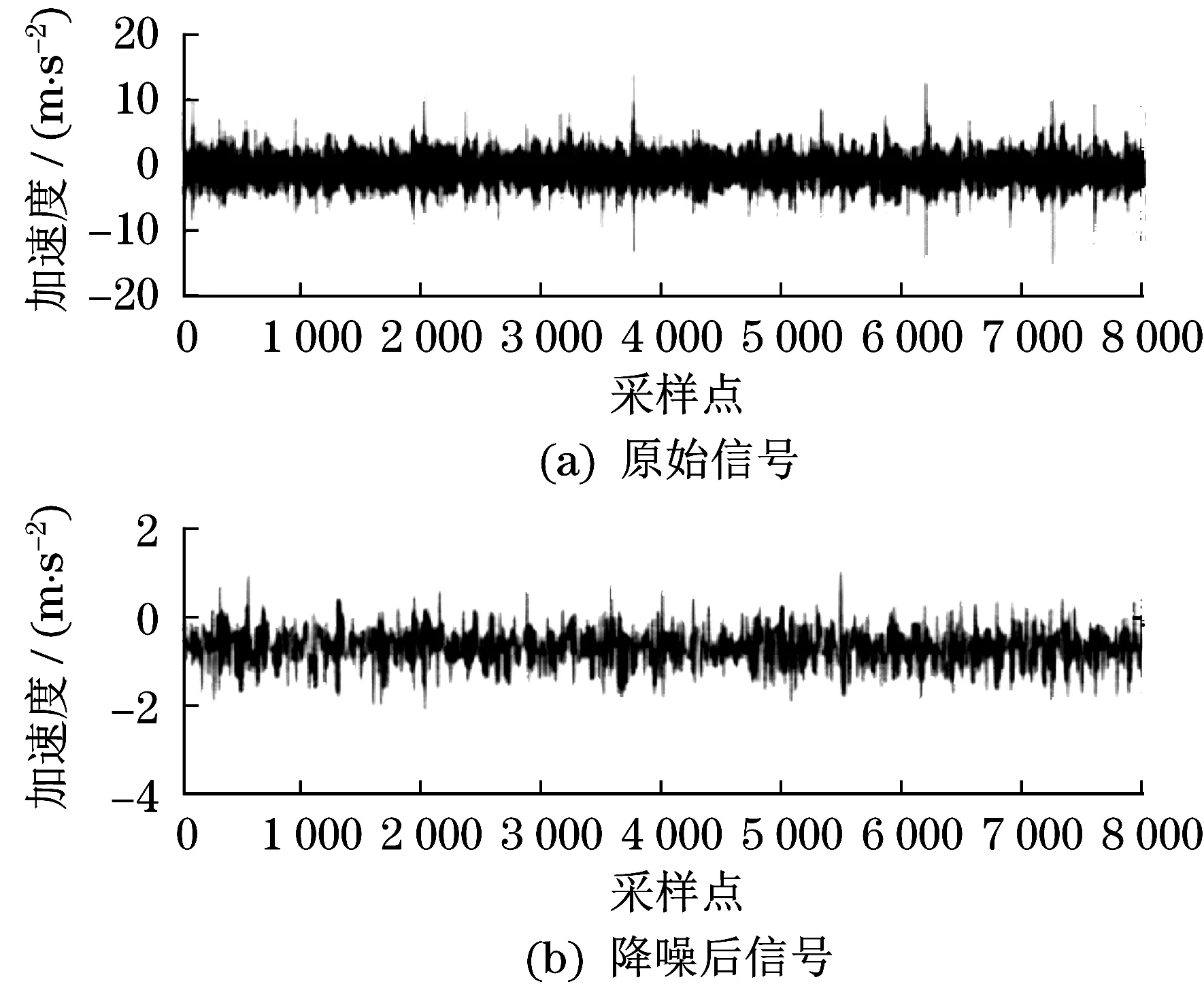
图4 小波变换降噪前后对比Fig.4 Comparison of wavelet transform before and after denoising
为同时提升模型收敛速率与精度,应对以上各项特征值实施归一化,得到训练、测试样本见表1和表2。根据表1和表2可知,齿轮箱主要形成了5种不同模式,包括4种故障与1种正常的运行模式。
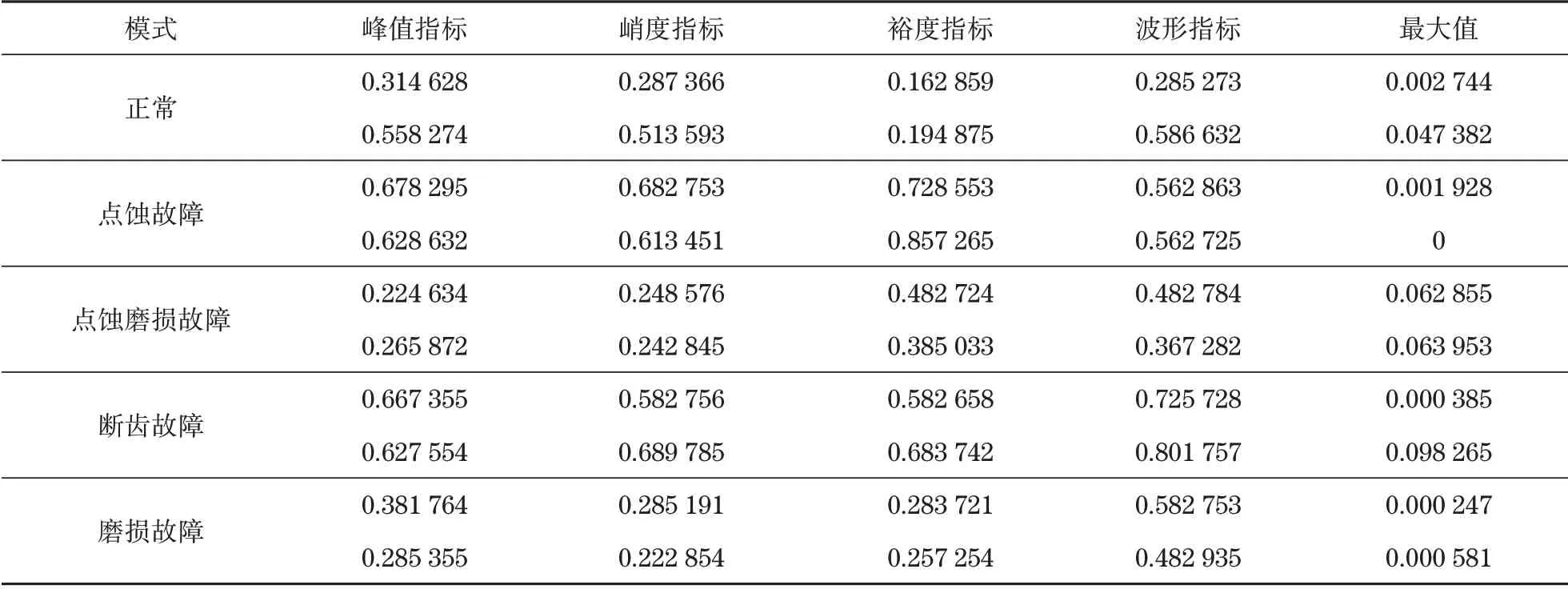
表1 训练样本特征值归一化Tab.1 Normalization of eigenvalues of training samples
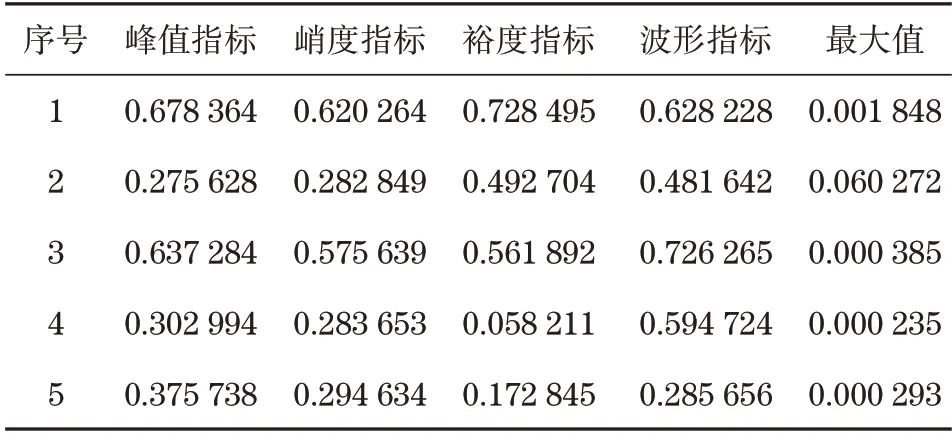
表2 测试样本特征值Tab.2 Test sample eigenvalues
3.2 神经网络建立及参数选择
可以通过3层神经网络完成n维至m维之间的函数映射,设计5-11-5网络。学习率0.01,目标误差0.001,迭代上限1 000。利用函数Sigmoid激励隐含层与输出层,以Trainlm作为训练函数。将GA种群设置在50,迭代上限为100次,交叉率0.6,变异率0.01,到达迭代数量上限时进化过程停止。设定蚁数目S为50,信息素挥发系数ρ为0.02,目标误差E为0.01。
总共选择10组参数对神经网络进行训练,各工作状态分别设置了两组,单组数据中包含了5个特征值。共设置50个特征参数实现神经网络的训练过程。输入向量是包含50个特征向量的矩阵,其大小为5×10。
3.3 2种算法效果比较
以GA-ACO对BP算法优化后再完成样本的训练过程,总共迭代20次获得图5中的训练结果,各项参数见表3。对表3进行分析可知,模型实际和期望输出形成了相近的故障诊断结果,误差0.000 185,满足目标控制标准。以上结果表明,对BP 算法实施GA-ACO优化处理后,可以对齿轮箱故障达到很高的诊断准确率。
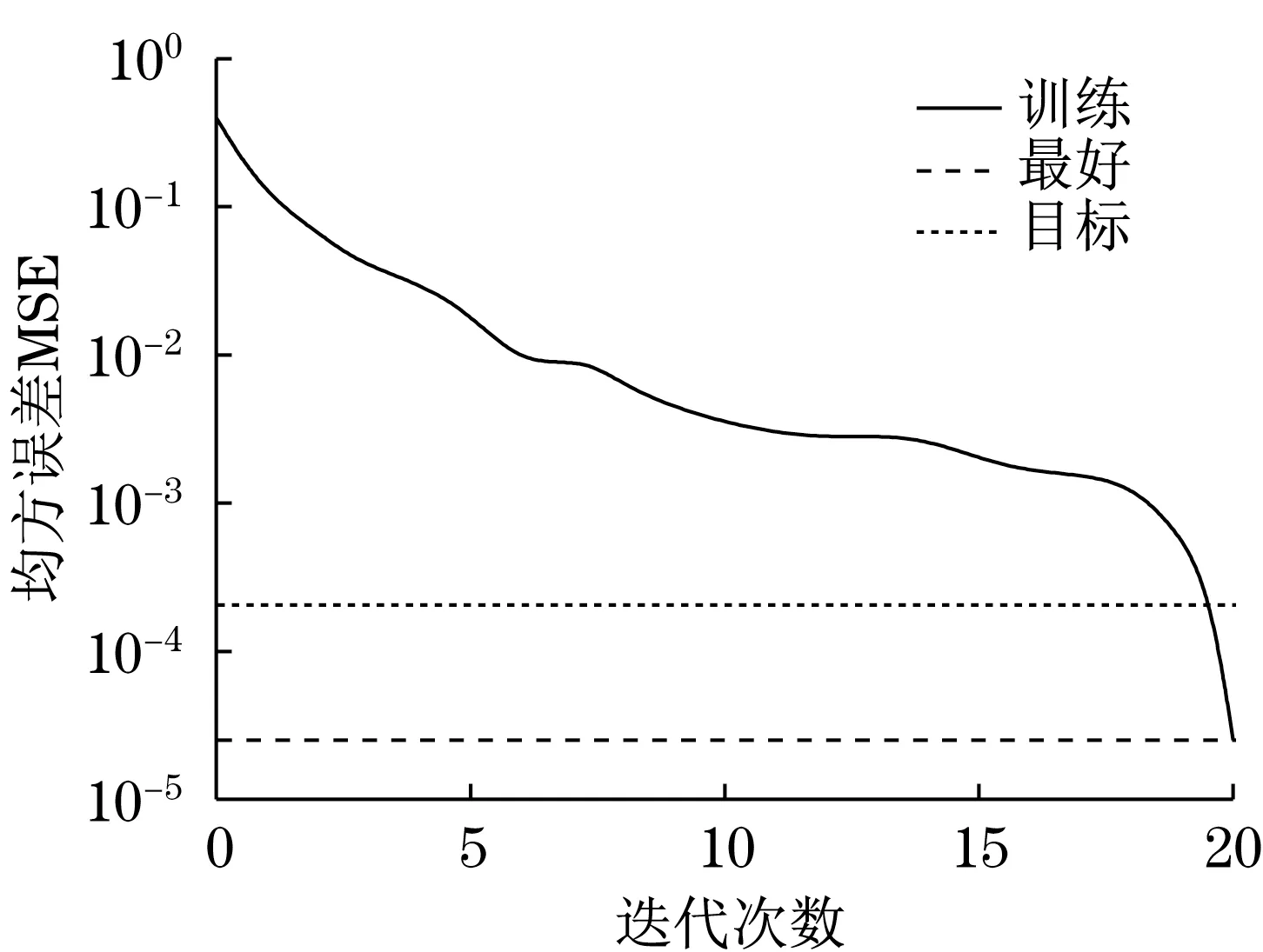
图5 GA-ACO优化BP算法训练结果Fig.5 Training results of GA-ACO optimization BP algorithm

表3 GA-ACO优化BP算法故障诊断输出Tab.3 GA-ACO optimized BP algorithm fault diagnosis output
对比本文2 种算法诊断性能,保持各项参数不变的条件下,以ACO 优化BP 算法实施训练。迭代61 次后,获得训练误差为0.000 965。以ACO 优化后BP 算法可以准确识别齿轮箱故障,测试误差只有0.013 8,未达到本文设计方法的性能。
测试结果差异性见表4。根据表4可知,同样的测试与训练数据,且保持各项参数一致的条件下,本文方法具有与ACO 优化BP 算法同样的分类准确率,而经GA-ACO 优化BP 算法则达到很小误差,且可以发现CPU 处理时间更短。因此,采用GA-ACO 优化BP 算法可以同时实现故障诊断精度与收敛速率的提升。
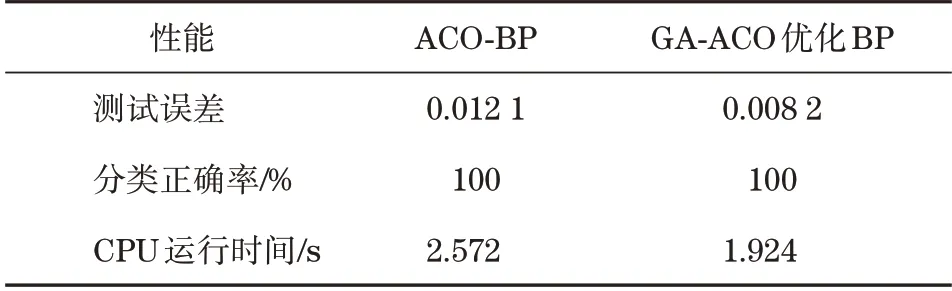
表4 性能结果比较Tab.4 Comparison of performance results
4 结论
模型实际和期望输出形成了相近的故障诊断结果,误差0.000 185,满足目标控制标准。表明对BP算法实施GA-ACO优化处理后,可以对齿轮箱故障达到很高的诊断准确率。相比较ACO 优化BP 算法,经GA-ACO优化BP算法达到很小误差,CPU处理时间更短,实现故障诊断精度与收敛速率的提升。
猜你喜欢
山东冶金(2022年3期)2022-07-19 03:24:36
电子制作(2019年19期)2019-11-23 08:42:00
制造技术与机床(2017年4期)2017-06-22 11:17:44
重型机械(2016年1期)2016-03-01 03:42:04
风能(2016年12期)2016-02-25 08:45:56
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
大连工业大学学报(2015年4期)2015-12-11 04:06:52
海军航空大学学报(2015年4期)2015-02-27 13:45:47
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
振动、测试与诊断(2014年4期)2014-03-01 01:14:09