
基于转动惯量辨识的PI控制器参数自整定
2023-01-03 13:36丛峰武傅国辉李熙然徐振兴
数字技术与应用 2022年12期
丛峰武 傅国辉 李熙然 徐振兴
1.鞍山钢铁集团有限公司齐大山选矿厂;2.大连交通大学
巡检机器人运动控制系统中,交流伺服系统的控制性能直接影响机器人系统运动的稳定性,而电机结构参数中转动惯量对系统性能的影响最为显著。本文先采用扩展卡尔曼滤波器算法对电机转动惯量进行辨识,在辨识结果基础上,根据最佳系统设计法,在保证系统快速响应能力和强抗干扰性的原则下,得出速度环PI控制器比例增益随转动惯量作线性调整时能够满足系统控制要求。
近年来,变频调速技术发展迅速。永磁同步电机因其结构简单、平均效率高、体积小、重量轻、调速范围大等优点,成为伺服系统动力输出的重要驱动模块,但是其缺点同样明显。首先,当外界温度过高或者过低时,电机可能会发生失磁现象,使得电机性能下降甚至损坏,影响伺服系统的控制性能。其次,当永磁同步电机长时间运行时,电机结构的参数会随时间产生变化,电机转轴的转矩输出特性也随着负载的频繁变化而降低。为了解决此问题,同步获取电机参数的变化,并且根据变化的参数调整控制器内部增益或给出补偿,能缓解参数变化给伺服系统控制效果带来的影响[1]。目前工程应用中的伺服器多采用人工手段对控制器参数加以调整,该方法要求工作人员有极高的专业知识储备和丰富的调试经验。为了保证控制效果,当改变电机负载之前,都需要调整控制器参数,这会增加生产成本和延长制造周期[2]。这些因素极大地影响了伺服控制技术的发展与推广。
1 系统整体方案设计
永磁同步电机具有复杂性、非线性、强耦合等特性[3],为精确控制伺服电机的速度,在中小功率的伺服系统中,通常采用直轴电流为零的转子磁场定向矢量控制策略[4]。为了实现解耦控制,系统采用电流环与速度环双闭环反馈控制策略,近似解耦方式的反馈解耦能够得到良好的动静态性能,能高精度线性控制电机转矩,达到近似解耦控制的目的,如图1所示为系统设计方案的整体结构框图。

图1 系统整体结构框图Fig.1 System overall structure block diagram
2 转动惯量辨识
转动惯量的变化会直接影响系统的控制性能[5],对系统性能调节的前提和依据是在线监测转动惯量的变化趋势。本文采用基于扩展卡尔曼滤波器的电机转动惯量辨识算法,在电机低频转速时,能实时监测电机速度状态,并能估计负载状态和某些参数[6]。
扩展卡尔曼滤波器主要包括状态预测和校正反馈两个阶段,预测过程为时间更新过程,校正过程为测量更新过程。预测过程中,在k时刻状态估计x^ (k),利用系统的状态微分方程可预测k+1时刻的状态,先验估计值x^ (k+1)[6];校正过程中,以实测值来校正经过上一步预测得到的状态先验估计值,其递推流程如图2所示。

图2 扩展卡尔曼滤波器辨识流程Fig.2 Extended Kalman filter identification
将永磁同步电机的机械运动方程改写为如式(1)所示:

在永磁同步电机伺服控制系统中,可测量输出转矩和转子机械角速度,因此B=0,T为卡尔曼滤波器的采样周期,可将永磁同步电机的机械运动方程和输出方程如式(2)、式(3)所示的状态方程表示:


对上述方程进行离散化,可得系统的梯度矩阵如式(4)所示:

变换矩阵如式(5)所示

根据迭代方程及系统状态方程,可得扩展卡尔曼滤波器辨识算法,算法流程为在辨识子程序运行前对系统进行初始化,包括电机特性参数、算法采样周期、仿真总时长等。设定仿真的采样周期为0.0001s,采样时长为0.6s,状态变量初值x(0)经对次仿真验证选取10-6kg·m2,估计噪声协方差矩阵初值P(0)取为diag(1,1,10),测量噪声的协方差矩阵初值R(0)取为0.05。因为电机速度发生变化时辨识才有意义,仿真时设转速幅值为200r/min和300r/min,其变化频率为25Hz,并添加电机在运行过程中外部扰动引起的噪音,即转速振荡。当电机空载启动时,转动惯量的输出值即为电机本身的转动惯量,其转动惯量的辨识输出曲线如图3所示。

图3 扩展卡尔曼滤波器惯量辨识结果曲线Fig.3 Curve of extended Kalman filter inertia identification result
转动惯量的辨识结果曲线可知:辨识结果在0.32s时接近真实值,稳态时惯量输出值为0.0007974kg·m2,其误差为0.33%,是在误差允许范围之内。以给定方波脉冲转速模拟外部扰动引起的电机转速变化时,转动惯量输出曲线、转速输出曲线变化频率相同频率,最大误差不超过1.5%。在惯量不发生变化时,辨识算法在外部干扰作用下,其输出能够保证较高精度,对于复杂时变系统有着很强的跟踪特性,满足参数自整定需要。
3 控制器参数自整定
根据伺服系统控制器参数整定得先内环后外环的原则,先对电流环进行整定。两个电流环控制器通结构设计相同,因此选择转矩电流环作为研究对象[7]。其中电流环的开环传递函数如式(6)所示:

其中,Ti为积分时间常数,Tif为反馈滤波时间常数,Ki为电流环PI控制器比例增益;KPWM为逆变器放大系数,TPWM为逆变器时间常数,它们的取值与IGBT开关频率有关;Ra为电枢绕组等效电阻,La为电枢绕组等效电感,Ka为电流检测反馈增益。
电流环PI控制器整定后比例及积分常数如式(7)所示:

根据上式分析可得,电流环控制器参数通常与伺服系统本身的结构有关。
速度环的开环传递函数如式(8)所示:

速度环PI控制器比例及积分常数的整定结果如式(9)所示:

根据上式可得,速度环PI控制器积分时间常数通常与伺服系统本身的结构有关,而比例增益要随转动惯量作线性调整,以补偿因转动惯量变化带来的系统性能下降。
电机转动惯量变化范围设置为从无负载状态至初始转动惯量值的10倍,递增步长为0.0008kg·m2,记录每次比例增益调整值,如表1所示为其输出结果。

表1 速度环比例增益与转动惯量变化关系Tab.1 Relationship between proportional gain of speed loop with the moment of inertia
将速度环比例增益与对应时刻的转动惯量进行线性拟合,拟合曲线如图4所示,两者之间可在线建立线性正比关系,拟合曲线的确定系数为1,验证了算法设计的有效性,自整定控制算法的输出结果能够对转动惯量的变化进行动态跟踪,并实时做出相应的调整。

图4 速度环比例增益与转动惯量拟合曲线Fig.4 Fitting curve of velocity ring proportional gain and moment of inertia
设定电机给定转速为1000r/min,施加1N·m的负载转矩,在0.1s时突加负载转矩,此时负载转矩为5N·m,转速及电磁转矩的输出曲线分别如图5和图6所示。
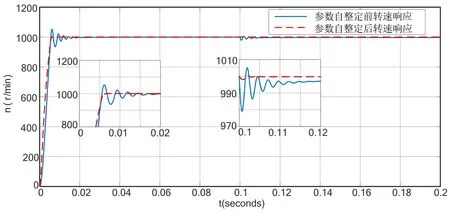
图5 两种控制模式下电机转速仿真曲线Fig.5 Simulation curves of motor speed under two control modes

图6 电磁转矩输出曲线Fig.6 Electromagnetic torque output curves
如图5所示,参数整定前PI控制器控制转速时,其最大超调量达到6.7%,转速超调量大,多次振荡后趋于稳定,稳态时间为0.022s,调节到稳态得时间过长,振荡次数过多,使电机在运动过程中发生抖动现象,长时间处于非平稳启动状态容易毁坏电机[7];转动惯量辨识的PI自整定控制方式,转速响应快,超调量小,调节时间比整定前下降61%。在电机运行过程中加负载转矩时(0.1s),整定前转速会下降约给定转速的1.1%,影响电机平稳工作;反而整定之后施加负载,电机在外部干扰下其转矩下调量为0.1%左右,电机能稳定运行。
如图6所示,控制器参数整定前电机在启动阶段转矩产生振荡,增加电机能耗,稳定性降低,产生冲击电流,影响电枢绕组,严重时电机会烧毁。当扰动发生(增加负载转矩)时,电磁转矩也会发生轻微脉动,对外部负载的干扰也比较敏感。参数自整定后,启动阶段转矩比较平稳、电流超调较小,在外部扰动的情况下,转矩接近无抖动状态,系统的抗干扰能力显著提升。
4 结论
本文主要研究了基于扩展卡尔曼滤波器的转动惯量在线辨识方法,基于此种辨识方法实时监测转动惯量的变化趋势,以此为依据设计了交流伺服系统电流环与速度环控制参数整定方案,并在上位机进行系统仿真,得到如下结论:
(1)转动惯量辨识速度快,在0.32s辨识输出曲线趋于收敛,稳态误差为0.33%,在受到外部扰动时的最大误差不超过1.5%。
(2)参数自整定后,系统在启动阶段转速超调量有明显下降,调节时间降低61%,且启动电流更小;在突加负载时,转速脉动降低1%,转矩实现了无抖动调节。
引用
[1]陶涛,林荣文,李伟起.基于蚁群算法的交流永磁伺服系统控制器参数寻优研究[J].电气开关,2020,58(3):64-69.
[2]ZHENG W J,LUO Y,CHEN Y Q,et al.A Simplified Fractional Order PID Controller's Optimal Tuning:A Case Study on a PMSM Speed Servo[J].Entropy,2021,23(2):130.
[3]杨晓辉.数控机床中永磁同步电机非线性混沌同步控制算法的研究[D].南昌:南昌大学,2016.
[4]王子昭,费骏韬,史林军,等.永磁同步电机电流控制策略比较分析[J].电机与控制应用,2019,46(5):64-71.
[5]徐勇.交流伺服系统控制器在线参数自整定方法[J].电机与控制应用,2017,44(6):45-50.
[6]贾勇.交流伺服系统PI控制器参数自整定方法研究[D].大连:大连交通大学,2018.
[7]陈鹏展.交流伺服系统控制参数自整定策略研究[D].武汉:华中科技大学,2010.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
北京航空航天大学学报(2016年4期)2016-02-27
电源技术(2015年1期)2015-08-22
弹箭与制导学报(2015年1期)2015-03-11
振动、测试与诊断(2014年4期)2014-03-01
