
基于结构光三维重建的成人第3 指蹼间隙的形态学分型及临床意义
2022-12-30 09:24冯培勋李桂军赵永红程明亮李立国
中国临床解剖学杂志 2022年6期
冯培勋,李桂军,赵永红,程明亮,李立国*
1.郑州卫生健康职业学院,郑州 450199;2.郑州大学第五附属医院儿童康复科,郑州 450052;3.河南中博生物塑化科技有限公司,郑州 450001
并指畸形是一种相邻指间软组织或/和骨不同程度融合的先天畸形,其总体发病率为0.03%~0.05%,临床上两指并指最为多见,其中以第3、4 指并指居首[1]。为消除并指畸形对患者手部外形和功能的不良影响,临床多采用手术矫正治疗,在并指分离手术的全过程中,指蹼成形是并指畸形修复的关键步骤[2]。传统的指蹼成形方法需要植皮覆盖指根侧方的皮肤缺损,如双三角形皮瓣法和矩形皮瓣法,操作较为简单,但手术创面较大,术后易出现指蹼爬行、瘢痕挛缩等并发症。国内外学者又提出双翼皮瓣法、六边形皮瓣法、掌背穿支皮瓣法,旨在通过将手背侧指根部的皮瓣转移到指蹼以及指根部区域,最大限度避免植皮,减少并发症,但存在手术设计难度大,操作复杂等问题,推进的皮瓣过短会影响术后指蹼的生理功能,过长则易导致供区皮肤没有得到充分利用,术后手背侧瘢痕长[3]。因此精确详细的指蹼间隙测量对手术的成功及并发症的减少具有重要意义。但目前指蹼间隙的重要性常被忽视,少有研究报道指蹼间隙的形态特征数据。本研究采用结构光三维扫描技术对成人第3 指蹼间隙形态进行观察和测量,为临床医生选择指蹼成形方案以及设计皮瓣形状提供详细的指蹼间隙形态解剖学资料。
1 材料和方法
1.1 材料
1.1.1 实验对象 以郑州大学科技园园区内职工(65人)和郑州卫生健康职业学院在校大学生(61 人)为研究对象。在知情同意的前提下,被调查对象双手功能正常,排除手足缺陷、畸形和骨损伤。有效调查对象126 人,年龄18~42 岁,平均(25.07±4.62)岁。
1.1.2 实验仪器和软件 惠普Pro S3 结构光3D 扫描仪(上海庆开实验设备有限公司)、索尼DSC-RX10M4数码相机(深圳市诺视奇科技有限公司)、精密程控三维平移台(厦门奥尔特光电科技公司)、3D 引擎基于openGL 自主研发。三维重建软件Amira 4.32(TGS 公司,美国);三维测量软件3-matic Research 11.0(Materialise 公司,比利时);图像处理软件Photoshop 7.0(Adobe 公司,美国);统计学分析软件SPSS 20.0(SPSS 公司,美国)。
1.2 实验方法
1.2.1 手部标记点和测量指标 根据人体指蹼测量方法[4],设置位于掌指关节、近节指骨和指蹼游离缘的8 个标记点(表1),以及近节指骨长度、指蹼实际长度、掌骨间宽度等8 项直接测量指标和4 项间接指标(图1,表2)。
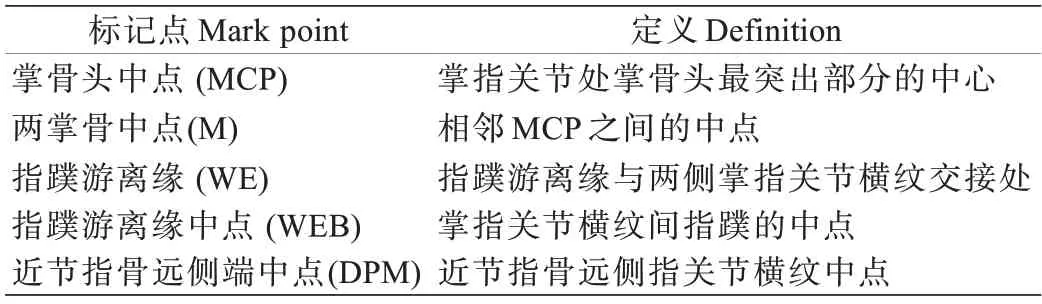
表1 第3 指蹼间隙标记点Tab.1 Mark point of the third finger web
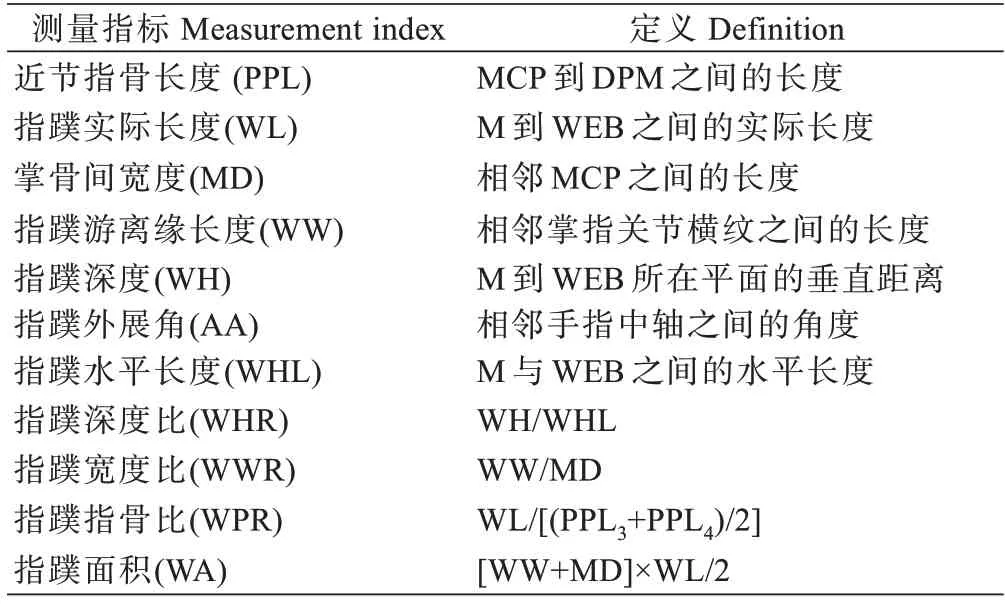
表2 第3 指蹼间隙测量指标Tab.2 Measurement index of the third finger web

图1 第3 指蹼间隙解剖测量示意图a:标识3、4 指近节指骨长度及掌骨间宽度 b:标识3、4 指蹼游离缘长度、指蹼水平长度、指掌骨间宽度及指蹼外展角 c:标识3、4 指蹼实际长度、指蹼深度比及掌骨间宽度PPL.近节指骨长度MD.掌骨间宽度WW.指蹼游离缘长度WHL.指蹼水平长度AA.指蹼外展角WHR.指蹼深度WL.指蹼实际长度Fig.1 Anatomical measurement of the third finger weba: marked the PPL3,PPL4 and MD3; b: marked the MD3,WHL,WW,AA; c: marked the MD3,WL,WHRPPL,proximal phalangeal length;MD,metacarpals distance;WW, web width;WHL,web horizontal length;AA, abduction angle; WHR,web height; WL,web length
1.2.2 结构光三维扫描系统工作原理 本研究应用的结构光三维扫描系统主要由硬件系统和软件系统组成。硬件系统主要由工业相机、镜头、投射光栅仪、安装支架、计算机、工作台及其辅助配件等组成。软件系统由摄像机标定、光平面标定和工件的扫描测量3 部分组成。首先,计算机通过控制视觉传感器(相机和投射光栅仪)采集图像,通过软件处理获取结构光线中心图像坐标。将标定获得的模型参数代入传感器数学模型,计算被测物表面点的空间坐标。最后,结合测量模型和输入的运动参数,运用设计的数据处理算法,对测量点坐标进行计算处理即得到精确三维模型和被测物体的真实尺寸。
1.2.3 第3 指蹼间隙三维模型数据采集和重建 志愿者将手平放于结构光三维扫描仪托物架上,保持第3、4 指最大指蹼外展角,在扫描仪顶部和对面底部两侧安置3 个摄像头,同时采集和检测指蹼间隙外形几何信息和纹理信息,为获得最佳扫描效果,将Pro S3 3D 的扫描参数设定为:对比度0.3~0.4,解析度1.0~2.0 mm,投影光栅大小4096×6096,扫描获得的三维点云数据,以VRML 格式文件保存。用Amira 4.32 软件对三维点云数据中的离群噪声点进行去噪,设定阀值δ 进行三维点云重采样和配准后,将数据导入Matlab 中进行点云的Delaunay 四面体网格剖分,对于网格模型修复中的孔洞区域,采用三角网格修复算法和Geomagic Studio 软件中基于曲率的孔洞修补功能进行孔洞填补。同时,数码相机采集到的纹理信息使用Geomagic Studio 软件进行纹理修复,即得到第3 指蹼间隙的三维重建模型,按照指蹼间隙测量指标使用3-matic Research 软件对三维模型进行测量。
1.3 统计学方法
运用Excel 2013 和SPSS20.0 统计学软件进行数据分析,所有结果以均值±标准差()表示,不同形态指蹼的测量参数采用单因素方差分析,若有差异组与组之间采用LSD 法进行多重比较检验,P<0.05 为差异具有统计学意义。
2 结果
2.1 第3 指蹼间隙解剖学形态分型
依据指蹼斜坡的倾斜程度、隆起的形状、位置以及下降程度,将第3 指蹼间隙解剖学形态分为5 种类型:①陡坡型45.24%(57 例),指蹼自两掌指骨关节间至近节指骨近1/4 平面处倾斜约30°,第2 个坡至指蹼游离缘几乎垂直下降;②微弧型20.63%(26 例),指蹼坡度下降缓和,第1 个坡在掌指骨关节间至近节指骨近1/4 平面处约为30°,第2 个坡与指蹼游离缘约成45°;③直线型15.08%(19 例),指蹼自背侧远端两掌骨头间向远端掌侧倾斜呈直线型,只形成1 个指蹼斜坡约45°;④圆弧型14.29%(18 例),指蹼侧面形状更接近扇形,指蹼自远端至近端的弧相连续,难以明确标识点进行指蹼坡度的测量;⑤前凸型4.76%(6 例),指蹼坡度介于微弧型和直线型之间,但在靠近指蹼游离缘时向前下方急剧下降,形成1个微凸的陡坡(图2)。
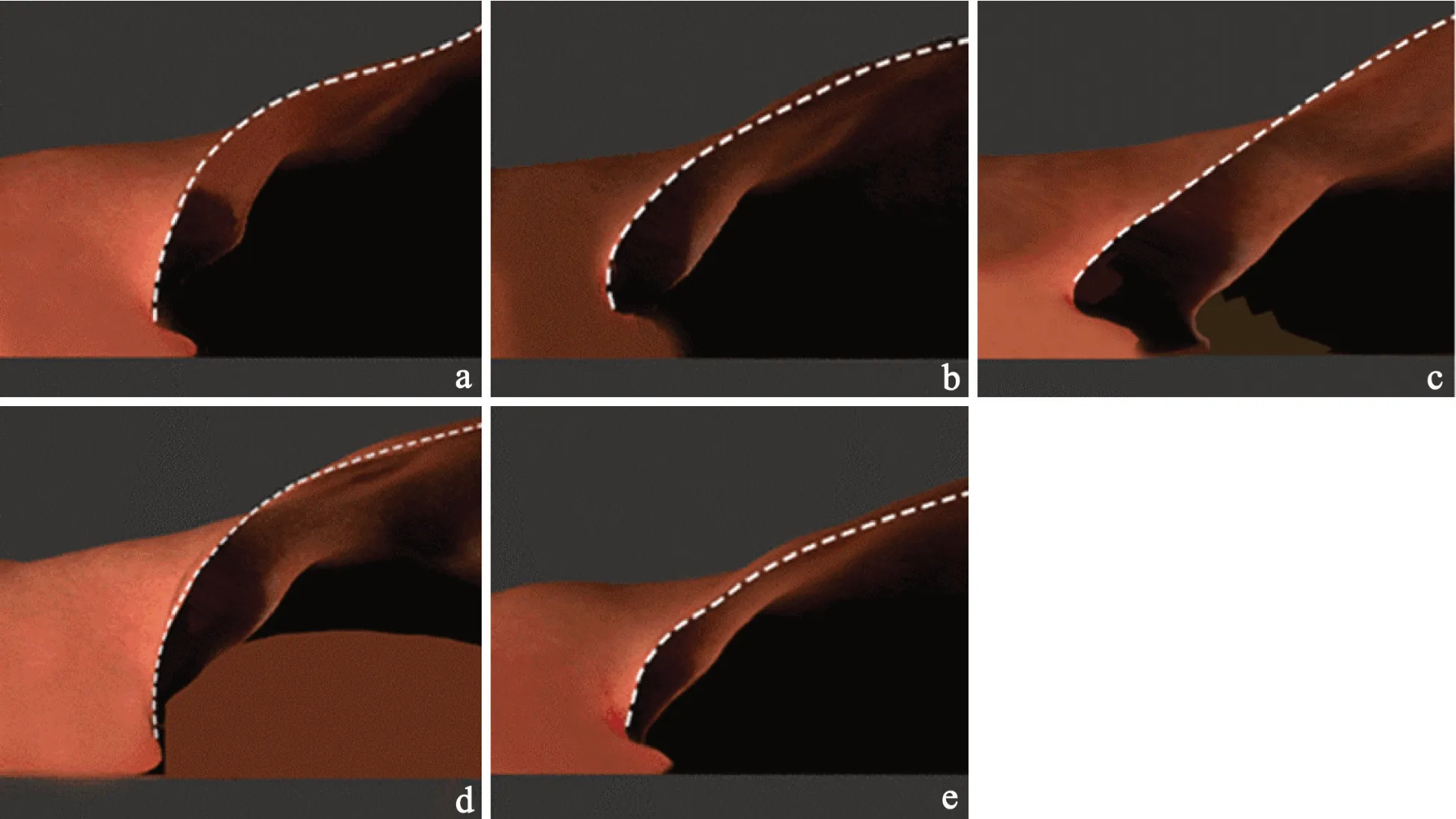
图2 结构光三维重建下第3 指蹼间隙解剖学形态 a:陡坡型b:微弧型c:直线型d:圆弧型e:前凸型Fig.2 Morphological classification of the third finger web under 3D surface structured light scanner a:steep slope-type; b: micro arcuate-type; c:straight line-type; d:circular arc-type; e:convex-type
2.2 第3 指蹼间隙指标测量
研究结果显示,第3 指蹼间隙的各项数据左右侧差异无统计学意义(表3)。在5 种指蹼形态类型中,微弧型的PPL3和PPL4最长,分别为(57.96±5.41)mm、(57.38±6.08)mm,前凸型的PPL3和PPL4最短,分别为(46.69±0.07)mm、(46.49±0.42)mm,圆弧型次短之。圆弧型、前凸型的PPL3和PPL4均小于微弧型,差异具有统计学意义(P<0.05)。圆弧型和前凸型的PPL3小于陡坡型,差异具有统计学意义(P<0.05)。前凸型的WH 小于陡坡型,差异具有统计学意义(P<0.05)。微弧型的WHR 小于圆弧型和陡坡型,差异具有统计学意义(P<0.05)。其余各项测量指标无显著性差异(P>0.05)(表4)。
表3 左右侧第3 指蹼间隙各指标测量结果(,mm)Tab.3 Mean and standard deviation of index in the third finger web of left and right morphological structure youths (Mean±SD,mm)

表3 左右侧第3 指蹼间隙各指标测量结果(,mm)Tab.3 Mean and standard deviation of index in the third finger web of left and right morphological structure youths (Mean±SD,mm)
表4 第3 指蹼间隙不同形态指蹼的各指标测量结果(,mm)Tab.4 Results and comparison of the different types of the third finger web (Mean±SD,mm)
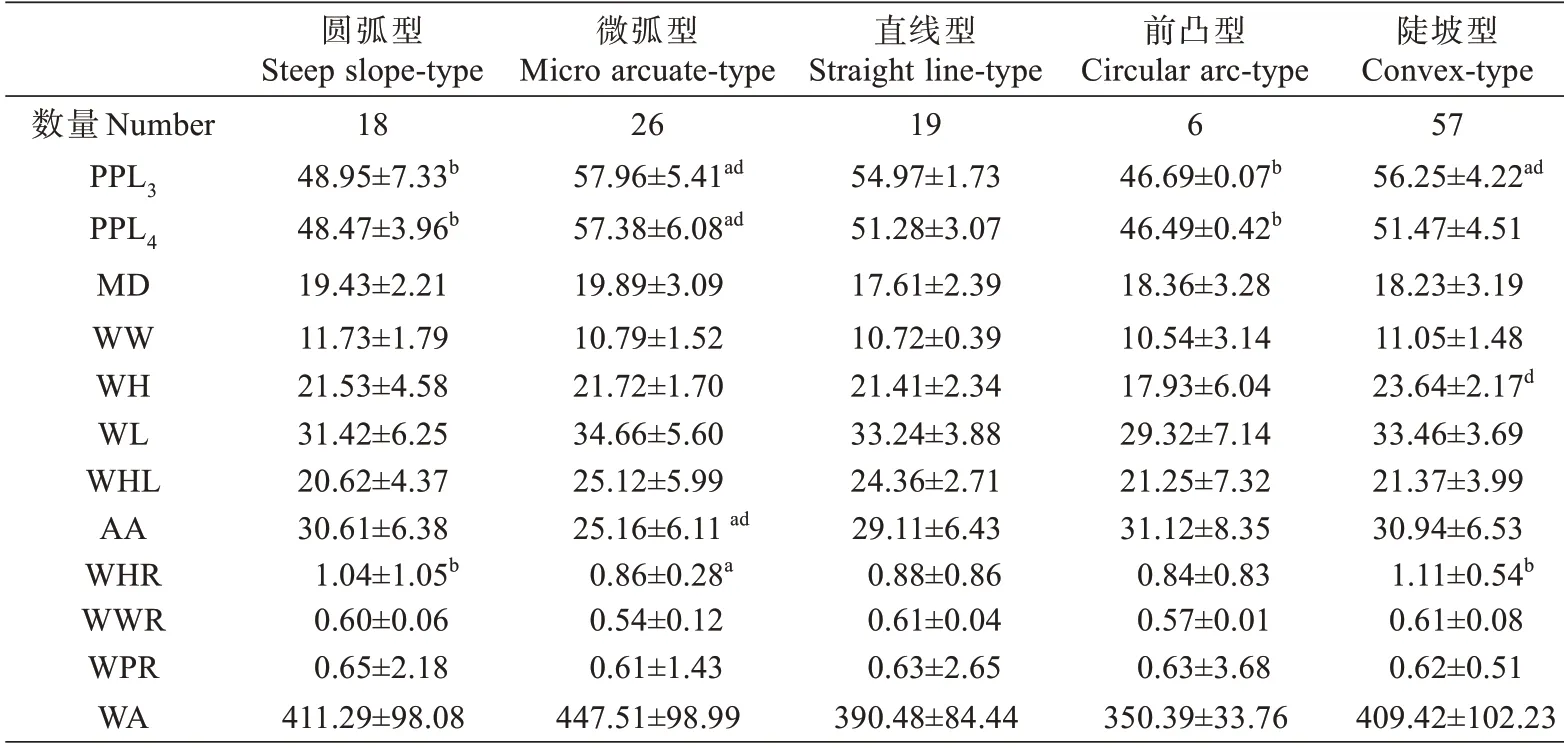
表4 第3 指蹼间隙不同形态指蹼的各指标测量结果(,mm)Tab.4 Results and comparison of the different types of the third finger web (Mean±SD,mm)
注:a P<0.05,与圆弧型比较 b P<0.05,与微弧型比较 c P<0.05,与直线型比较 d P<0.05,与前凸型比较Note: aP<0.05 vs circular arc type,bP<0.05 vs micro arc type,cP<0.05 vs straight line type,dP<0.05 vs convex type
3 讨论
3.1 国内外指蹼间隙解剖形态学研究
国内外对于指蹼间隙的解剖形态学特征研究较少。宋修军等[5]观察40 例正常人的指蹼结构,发现正常第2~5 指的指蹼自背侧向远端掌侧倾斜形成一定弧度的指蹼斜坡,指蹼位置约占近节指骨的1/2。王斌等[6]认为正常的第2、3、4 指蹼由手掌背侧掌骨头向掌侧整体倾斜呈45°漏斗样结构,至近节指骨中点水平,加入近侧指横纹。Pobe 等[7]对18 名成年人的右手进行测量发现指蹼自两掌指骨关节间向下的倾斜角约为25°,近节指骨的长度可以作为重建指蹼皮瓣面积的参考。
3.2 结构光三维重建第3 指蹼间隙测量数据
长久以来,手部外形数据的获取大多采用传统测量或灌注模型CT 扫描的方法[8],因指蹼间隙区域狭小,存在软组织在触碰测量时易受压变形或辐射大可重复性较差等问题,导致缺少完整准确的指蹼间隙解剖形态学数据,指蹼重建术的皮瓣设计和减脂覆皮修复缺乏形态学依据。随着光机电集合技术的发展,用于物体表面整体轮廓三维信息获取的结构光三维扫描技术应用于口腔牙科、整形外科等领域[9,10],结构光三维扫描技术以其快速精准,对人体无损害等优点,迅速成为人体器官组织三维建模测量研究的趋势。
为有效减少并指分离手术的并发症,使临床医生在设计皮瓣及手术方式时有据可依,本研究利用结构光三维扫描技术对第3 指蹼间隙的三维形态学特征进行观察测量,结果表明,第3 指蹼间隙的解剖学形态变化是一种常见现象。本组126 人(252)例第3 指蹼间隙,按照解剖学形态特点分为5 型,最常见的类型为陡坡型(45.24%,114 例),微弧型(20.63%,52 例),其次为直线型(15.08%,38 例),圆弧型(14.29%,36例),最为少见的为前凸型(4.76%,12 例)。在以往研究 中[8,11],MD 平均为(19.58±2.82)mm、WL 平均为(34.36±4.27)mm,与本研究结果MD(19.92±2.11)mm、WL(33.62±3.18)mm 基本相同,但PPL3(54.78±4.56)mm 和PPL4(50.85±4.79)mm 的测量,较Pobe 等[7]测量的PPL3(65.56±4.96)mm、PPL4(60.92±4.09)mm短,推测第3、4 近节指骨的长度可能与地域、种族的差异有关。既往研究推荐手部指蹼重建都以近节指骨长度和掌骨间宽度为参考点,设计皮瓣的长度约为近节指骨的1/2~2/3,宽度限于掌骨间宽度以内,作为一个足够的皮瓣区域,可以覆盖成人的整个指蹼间隙[7]。本研究显示,第3 指蹼间隙的指蹼指骨比:圆弧型为(0.65±2.18)、微弧型为(0.61±1.43)、直线型为(0.63±2.65)、前凸型为(0.63±3.68)、陡坡型为(0.62±0.51);第3 指蹼间隙的指蹼宽度比:圆弧型为(0.58±0.06)、微弧型为(0.54±0.12)、直线型为(0.61±0.04)、前凸型为(0.57±0.01)、陡坡型为(0.60±0.08),本结果与上述结论类似,提示在皮瓣设计时长度应至少为近节指骨长度的62%,宽度应至少为掌骨间宽度的58%,才能获得较好的皮瓣覆盖面积。在这5 种类型的指蹼间隙中,圆弧型指蹼的深度与指蹼的水平长度基本相等,其指蹼深度比为(1.04±1.05),而其余4 种类型的指蹼深度比陡坡型为(1.11±0.54)、微弧型为(0.86±0.28)、直线型为(0.88±0.86)、前凸型为(0.84±0.83),据此推测指蹼的形状可能与指蹼的水平长度和指蹼深度的变化有关,有待进一步的研究。
3.3 第3 指蹼间隙形态学分型临床意义
国内外学者在探索并指矫正手术方法时发现正常人双手第2~5 指指蹼间位置、弧度及坡度差别不大,但个体间存在差异,由于长期缺乏对指蹼间隙解剖形态学的系统研究,临床医生在进行皮瓣设计和外形修复时大多根据患者健侧指蹼外形观察和自己的经验习惯,较难保证数据的客观性和手术的临床效果。近年来学者致力于研究指蹼重建的方法,旨在降低并发症的同时最大程度恢复指蹼的外形和功能,成德亮等[11]对30 例先天性并趾畸形患者进行双翼皮瓣指蹼重建时发现,以近节指骨长度和掌骨间宽度为参考点,设计出的皮瓣基本可以覆盖成人的整个指蹼间隙,但指蹼的坡度存在变化,需要根据坡度的变化适当调整皮瓣与指蹼掌侧缘的缝合位置,并适当去除并指畸形处多余的脂肪组织,方可达到术后指蹼外观自然,深度、宽度和坡度正常率较高的效果。Sahin 等[12]对15 例患者进行术前健侧指蹼间隙观察分析,选取其中的9 例14 个指蹼采用双翼皮瓣法,通过旋转两个分叶状矩形皮瓣与掌侧三角皮瓣对合,解决指蹼间隙存在两个约为45°坡度的问题,取得较好的临床疗效。虽然他们在临床实践中发现指蹼间隙在形态上存在个体化差异,但未进一步从解剖学的角度阐述清晰其整形的机理,对比Sahin 等[12]测量的数据与本研究中最常见的陡坡型(45.24%例)和微弧型(20.63%例)两种类型的测量结果相近,指蹼自两掌指骨关节间向掌面倾斜时都会形成两个明显的坡面,虽然圆弧型(14.29%例)是连续的弧度但在外型上与陡坡型相近,因此在重建这几种类型的指蹼时,可选择V-Y 联合矩形皮瓣法、双翼皮瓣法等能灵活调整指蹼侧缘和指蹼掌侧缘的缝合位置,方便构建坡度变化复杂的指蹼间隙方法。与正常指蹼外观进行比较是评估指蹼重建术效果的有效方法,Pobe 等[7]对正常人手部和足部指(趾)蹼进行解剖学研究,推荐使用矩形皮瓣法重建只有一个指蹼斜坡的直线型指蹼间隙,其优点是设计简单,术中以约45°角推进皮瓣下降至远端指蹼掌侧缘,获得接近正常的指蹼外观及坡度。丁健等[13]测量患者健侧指蹼形态学数据,选择五边形皮瓣法重建45°倾斜角的指蹼间隙,术后根据指蹼的功能、外观、深度、坡度以及主观满意度评价手术效果,获得满意疗效。由此可见,直线型(15.08%)和前凸型(4.76%)这两类只存在一个明显坡度的指蹼间隙,传统的矩形皮瓣法、五边形皮瓣法等加以延伸就可以获得相对正常的指蹼外观。综上所述,细致的指蹼间隙解剖形态学研究,有助于临床医生术前指蹼重建方案个性化的选择和设计,术中皮瓣与指蹼掌侧缘缝合位置的精确调整,保持指蹼的生理性倾斜,从根源上减少并发症的发生,在外形数据比例上接近原指蹼间隙。
本研究通过对成人第3 指蹼间隙进行解剖形态学分型及相关测量分析,对指蹼间隙解剖学资料是一个良好的补充,可为临床医生进行指蹼重建手术方案的制定提供更详细的解剖学依据。但存在一些不足,本研究样本数量有限,所测人群均来自河南省,存在地域局限性,在指蹼形态功能研究方面还需要生物力学的支持,后续将继续收集更多的样本开展更全面的研究。
猜你喜欢
材料保护(2022年3期)2022-12-07
金属热处理(2022年8期)2022-11-17
实用手外科杂志(2022年2期)2022-08-31
农产品市场周刊(2022年15期)2022-08-13
汽车实用技术(2022年7期)2022-04-20
物理学报(2022年2期)2022-02-17
临床小儿外科杂志(2022年1期)2022-02-17
山东林业科技(2021年1期)2021-03-05
大江南北(2019年11期)2019-11-12
表面工程与再制造(2019年1期)2019-05-11
