
三山岛金矿开采环境生成与预测研究
2022-12-29 08:32李海龙
黄金 2022年12期
赵 龙,李海龙
(山东黄金矿业(莱州)有限公司三山岛金矿)
引 言
地下采场空间环境生成往往较为复杂,传统平面设计使得工程技术人员不能直接获取巷道系统的空间分布特征。为了在地下采场开采时获得完整的采场空间环境,国内外学者进行了大量研究。江记洲等[1]根据地下金属矿山巷道的空间立体几何特征,采用圆柱面投影的方法将三维点云数据转换为二维离散的点云数据,使用三角剖分的方法建立稳定可靠的三角网及二三维点云之间的拓扑关系,并针对国内地下矿山的巷道开展了三维激光扫描和三维重建试验,对巷道的三维模型成功进行了实体模型重建,相较于传统的三维建模方式,该种方法对巷道空间三维环境再现的精准率得到了极大的提高。李学军等[2]提出了基于Supermap平台开发采矿巷道三维可视化系统的各项功能模块和具体的操作方法,达到了理想的使用效果;靳德武等[3]通过采集各种地质动态信息,构建了可视化的采场结构三维充水模型,最终应用在采场底板突水监测预警工作中,为井下水害防治提供了新的解决思路;石信肖等[4]使用三维激光扫描仪获取煤矿巷道点云数据,并进行三维精细化模型建立,研究了狭长型海量巷道点云数据精细建模问题,借助某煤矿点云数据验证了三维激光技术在巷道建模的可行性,为数字化矿山建设提供了精细化三维可视化模型。
在地下采场中,地应力随着开采深度的增大逐步增高且变得越来越复杂。高地应力导致的井下安全作业问题也日益凸显,而对于地质条件较为复杂的情况,则有可能出现岩爆、冒顶、片帮等安全事故。为了能够实现对深部金属矿开采物理环境的精准监测,国内外学者进行了大量的研究。徐文全等[5]为研究矿山采动空间围岩应力演化规律及其导致煤岩失稳问题,基于静水压原理开发了采动应力监测传感装置,通过现场采动应力实测,实时获取工作面煤岩体采动应力变化趋势,为采场安全作业提供保障;FILIPPO等[6]通过光纤布拉格光栅(FBG)传感器研发了光纤传感系统来监测试件的变化情况,以精准监测钢筋拱顶。张宇等[7-8]将光纤光栅传感器用于硐室围岩变形(应变)监测,光纤光栅传感器具有更高的可靠性和连续性,采场环境感知效果好,验证了光纤光栅传感器在深部地下采场内监测的可靠性。
山东黄金矿业(莱州)有限公司三山岛金矿(下称“三山岛金矿”)位于山东省莱州市,目前采用规模化无人采矿技术,为了保障开采设备在采场内安全作业,开展了地下采场环境生成及预测研究,以期为矿山安全高效开采提供技术支撑。
1 三山岛金矿试验采场开采设计
地下金属矿规模化无人采矿技术示范区选取地点为三山岛金矿西山矿区西南翼-630 m到-645 m分段水平,试验采场范围1440勘探线—1520勘探线。为满足三山岛金矿的生产需求和示范区安全作业的要求,针对规模化无人开采工艺和开采装备的特点,在开采过程中使用智能开采装备凿岩、装药,智能装药车完成炮孔装药作业后,利用井下的无线起爆网络在地面集控进行遥控起爆,采用下向中深孔落矿嗣后充填连续采矿法开采(见图1)。集群开采工艺示范区布置在-645 m分段,在-645 m分段内沿矿体走向布置试验采场。采场矿体倾角45°,平均水平厚度15 m,炮孔采用下向扇形中深孔布置,倾角50°。矿房垂直矿体走向布置,宽8 m,高15 m,长度为矿体水平厚度。

图1 下向中深孔落矿嗣后充填连续采矿法示意图
1)采准工程布置。在-630 m分段水平,主斜坡道联络道处(已充填工程端部)掘进平巷至矿体端部,作为新的沿脉巷道,在沿脉巷道内掘进穿脉巷道贯通矿体,为下阶段施工做准备。在-645 m分段水平,在现有沿脉平巷内向矿体侧掘进平巷,缩短矿体与沿脉巷道的距离,沿矿体走向掘进新的沿脉巷道,减少后续出矿穿的工程量。
2)切割工程。切割工程由底部中段在矿体上盘沿矿体倾角掘进切割天井,先以矿房端部切割天井为初始自由面爆破形成切割槽,为后续爆破工作提供自由面。采场初步爆破完成后,出矿后的采空区即为该采场后续爆破的自由面。
3)凿岩爆破及出矿。使用智能凿岩台车在-630 m分段以下向50°倾角钻凿扇形炮孔,待切割天井施工完毕,即可进行试验采场爆破、出矿工作。出矿工作在-645 m分段水平出矿穿中进行,每次崩落的矿石由智能铲运机运至10号溜井,溜井口配置有固定破碎机,可通过破碎机自主作业系统对大块矿石进行二次破碎。
4)回采顺序。试验采场回采顺序采用“隔一采一”的方式,即将矿块划分为一步采矿房和二步采矿柱,先采一步骤矿房,再回采二步骤间柱和顶柱。由-630 m分段沿脉巷道进入矿体开采区域,每隔一个矿房即可进行一个工作面的开采,先对一号矿房进行回采,矿房开采完毕,架设隔板,由-630 m分段对矿房进行尾砂胶结充填,待充填体达到一定的强度后,再对二号矿房进行开采,后续再进行充填作业,保证采场顶板的稳定性。
2 三山岛金矿试验采场空间环境生成
2.1 试验采场空间点云数据采集
针对-645 m分段试验采区内采场空间环境的生成方法,主要采用三维激光扫描进行采场三维空间数据的获取[9],采集工作主要包括设站点选择、仪器架设、参数设定等。本次扫描采用的三维激光扫描仪型号为徕卡P40,具体参数见表1,其外观见图2。
现场数据采集时主要设站点位于穿脉巷道与分段平巷的交界点,对于穿脉巷道中三维激光覆盖不到的点,则深入到穿脉巷道与回采巷道交界点进行扫描。由于巷道内实施扫描工作较地面环境更为狭小,在巷道走向上容易出现突出岩块遮挡激光的现象,造成空间环境感知不够完整的现象,针对此种可能发生的情况,在穿脉巷道和回采巷道内每隔5 m设置一个设站点,尽量使巷道内的点都被扫描到,具体设站点布置见图3。

图3 试验采场三维激光扫描仪设站点布置示意图
2.2 试验采场空间点云数据处理
三维点云数据在获取过程中会受到多种外界因素如被扫描物体表面的干湿程度、风力和风向、施工粉尘、移动的车辆、人员等的影响,造成点云数据产生噪点,需要在后期数据处理中剔除噪点。同时多区域点云数据的拼接、坐标转换也是后期点云数据处理工作的重要内容。因此,三维激光扫描获得的现场三维点云数据处理工作主要包括点云数据降噪、点云数据拼接与坐标转换、点云数据分类、点云数据精简、纹理映射及岩体表面形态提取等。空间环境生成时还要对扫描区域内的各类属性要素进行识别提取,对无法分辨或判识不确定的,需要按先外后内进行调绘。
在凸起或凹陷物体的临界边缘,激光触碰到目标体后可能会接收到2个甚至更多的反射信号。在实际扫描过程中,由于巷道围岩对激光的反射性较弱,而巷道中管线及其他设施材料对激光的反射性较强,因此会导致某些部位扫描回来的点云数据产生一定的厚度积累甚至偏离物体表面。对于这种非实体表面点云数据,采用人工交互方法时则不容易剔除,针对该种情况,选择采用算法自动进行点云数据的局部降噪,这里主要采用由Abdul Nurunnabi等提出的MCMD-Z自动降噪算法,算法具体步骤为:
输入:Npi点pi的邻域点集,个数记为k。
输出:点pi的邻域点集中正常点索引和异常点索引。

(1)
步骤2:遍历点pi的邻域点集中的所有点,计算出各自到拟合平面的正交距离OD。
(2)
步骤3:计算所有邻域内点的Rz-score。

j=1,2,…,k
(3)
式中:medianm=1,2,…,k(ODm)为求取邻域内所有点OD值的中值;MAD(OD)=1.483medianm=1,2,…,k(ODm)|ODj-medianm=1,2,…,k(ODm)|。
步骤4:逐个遍历邻域内所有点,判断各自Rz-score是否小于2.5,如果小于,则为正常点,否则为异常点,分别对应存储点索引到对应容器中。
使用MCMD-Z自动降噪算法处理完毕的巷道三维空间点云数据表现形态见图4。

图4 试验采场空间点云数据处理后图像
3 三山岛金矿试验采场物理环境生成
3.1 试验采场物理环境感知装置
为了实时准确地感知试验采场在回采过程中采场围岩的应力、位移、渗压等物理环境数据变化情况,实现开采装备作业过程中采场物理环境的实时可视化监测,研制了一套采场物理环境感知装置。选取精度高、性能良好的光纤光栅传感器用于实时采集试验采场的应力、位移、渗压等物理环境数据[10-12],为试验采场回采过程中开采装备的安全作业提供采场物理环境实时变化数据。采场物理环境感知精度可达到99 %以上。采场物理环境感知装置和光纤光栅传感器见图5。

图5 采场物理环境感知装置与光纤光栅传感器
3.2 试验采场光纤光栅传感器安装
根据-645 m分段开采示范区岩体的物理力学特性,利用Flac3D软件对试验采场进行三维建模,并对试验采场采矿设计回采过程进行数值模拟,得到巷道内部位移、应变等物理环境变化情况(见图6)。通过对模拟结果分析得出,在回采过程中采场围岩的最大主应力和最大位移主要出现在顶板位置。根据数值模拟结果和现场试验条件,确定试验采场内物理环境数据采集点的最佳布置方案。

图6 数值模拟回采过程巷道内部物理环境
在试验采场开始回采前,利用凿岩台车完成光纤光栅传感器布置孔的钻孔作业(见图7)。在传感器布置孔钻孔作业完成后立即进行光纤光栅传感器的安装作业(见图8),并对安装后的传感器工作状态进行测试,测试正常之后进行传感器布置孔的注浆作业,在注浆完成后开始对采场的物理环境数据进行实时采集和储存[13-16]。

图7 凿岩台车钻孔作业现场

图8 传感器安装作业现场
3.3 试验采场物理环境数据采集
在光纤光栅传感器安装完成后,利用采场物理环境感知装置对采场的物理环境参数(位移、应变、渗压等)进行实时采集。物理环境感知装置的测量频率10 Hz,8个测量通道,每个通道最多可挂载17个传感器,工作电压220 V,功耗10 W。使用时,先将光纤光栅传感器通过光纤与环境感知装置连接,然后使用网线将环境感知装置与电脑连接,实现试验采场物理环境变化的可视化。在试验采场开始回采时通过采场环境感知装置,可以实现对试验采场回采过程中采场围岩的位移、应变、渗压等各项物理环境数据的实时采集和储存(见图9)。
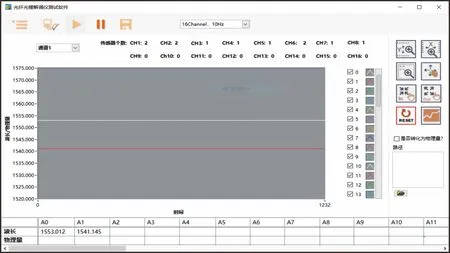
图9 采场物理环境数据采集
4 三山岛金矿试验采场物理环境预测研究
由于回采巷道与采场内的物理环境随矿石的采出进度、开采深度、巷道断面尺寸和矿岩性质等因素影响呈现规律性分布,可通过一部分已经回采采场监测点的数据变化特征,预测相邻采场物理环境变化。BP神经网络在非线性关系预测领域有着十分明显的优势[17],因此选用BP神经网络算法建立采场物理环境预测模型。
4.1 预测模型构建
根据BP神经网络的特性,试验采场物理环境预测模型的训练主要包含以下几个步骤:
1)确定初始连接权值、层与层节点之间阈值。
2)对训练集和测试集进行归一化处理。
3)选择递推函数,迭代计算各层输出值。
4)定义目标精度,迭代出符合精度的结果。
5)若迭代不收敛,则改变步骤1)后重复计算。
本文采用的BP神经网络预测模型主要包含输入层、隐含层和输出层。研究表明,当隐含层为一层时已经有较好的非线性映射效果[18],但为保证足够的预测精度和较快的计算速度,本文采用隐含层层数为2的神经网络模型。网络传递选用S型传递函数(见式(4))和逆向传播误差函数(见式(5))不断调节阈值和网络权值,并最终使误差函数F达到期望值。
(4)
(5)
式中:x为激活层的输入;f(x)为激活层的输出;ti为期望输出;Oi为网络的计算输出;n为输出解的个数。
神经网络的输入层包括到工作面距离l、巷道断面面积S、回采进度t、监测点坐标(x,y,z)、埋深h、岩石变形参数(弹性模量E、泊松比v)、岩石强度参数(抗压强度σc、抗拉强度σt、内聚力C、内摩擦角φ)等输入变量;输出层包括应力σ和位移u等输出变量。
4.2 预测模型训练
提取若干采场开采过程中各物理环境监测数据;其中选取不同回采巷道断面尺寸,不同开采深度,共500组数据。对500组数据集中训练,训练次数设定为2 000次,将训练集输入到神经网络中得到神经网络预测模型。利用BP神经网络预测模型得到试验采场临近采场位移、应变预测结果,见图10、图11。从图10、图11可以看出:现场监测提取值与BP神经网络模型的预测值基本拟合。应力最大误差为0.05 MPa,位移最大误差为0.33 mm,与实际测量值误差在5 %以内。

图10 实测位移与预测结果对比

图11 实测应力与预测结果对比
5 结 语
利用三维激光扫描仪对试验采场进行扫描,然后通过对三维激光扫描获得的现场三维点云数据进行点云数据降噪、点云数据拼接与坐标转换、点云数据分类、点云数据精简等处理,完成了试验采场的空间环境生成;并对采场物理环境生成方法进行研究,利用Flac3D软件对试验采场回采过程进行数值模拟和分析,确定回采过程应力集中和位移较大的区域,在这些区域布置高精度的光纤光栅传感器,利用性能稳定的光纤将光纤光栅传感器与研制的采场物理环境感知装置连接,实时采集并存储采场的位移、应变、渗压等物理环境数据;通过BP神经网络算法建立试验采场物理环境预测模型,能够快速预测临近采场回采中的物理环境变化,对开采装备的安全运行和试验采场的安全生产有着重要的指导意义。
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
矿冶工程(2021年6期)2022-01-06
有色金属(矿山部分)(2021年4期)2021-08-30
有色金属(矿山部分)(2021年2期)2021-04-02
家庭影院技术(2020年1期)2020-06-24
家庭影院技术(2019年4期)2019-04-17
电子制作(2019年24期)2019-02-23
家庭影院技术(2018年9期)2018-11-02
电子制作(2017年13期)2017-12-15
北方交通(2016年12期)2017-01-15
