某型线加速度传感器故障判定研究
2022-12-28 14:16沈晓兵
长沙航空职业技术学院学报 2022年4期
沈晓兵,王 勇,贾 乾,孙 亮,叶 宏,杨 进
(1.空军预警学院雷达士官学校,湖北 武汉 430019;2.93110部队,北京 100843)
线加速度传感器是飞行器上的重要元件,在对某飞行器进行修理时,在故检测试阶段出现故障参数,对飞行器进行排查,凭经验逐步缩小排查范围、逐个换件[1],最终确定故障器件为线加速度传感器。该线加速度传感器为进口型器件,价格贵,参考资料少,缺乏测试指标,按照飞行器整体测试要求,判断该传感器故障的测试仅针对其在某个特定的输入值(加速度值)下进行,这对于具有较宽线性区间的加速度计的测试是不全面的[2],有一定概率犯第二类错误[3](将故障传感器判定为合格传感器),因此需要对该传感器进行更全面的测试,以确定飞行器测试时出现故障参数是传感器故障导致的。为解决传感器故障判定问题,首先对该传感器进行解剖和结构研究,绘制内部结构图并分析其工作原理。在此基础上研究该传感器的测试电路和测试方法,然后采集、分析传感器的测试数据,根据该传感器工作原理确定测试数据线性化方法,从而判定出故障的传感器。
1 线加速度传感器工作原理分析
1.1 传感器引脚定义
线加速度传感器如图1所示,其在飞行器中的主要作用为测量飞行器沿三个坐标轴的线加速度,其测量的加速度方向已标于传感器上。

图1 线加速度传感器
其对外接口如图2所示。
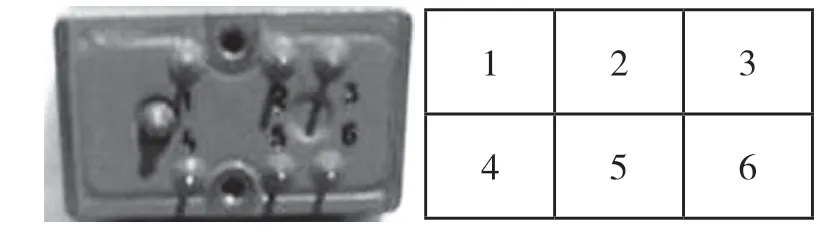
图2 引脚标号
接口定义见表1。表1中已知3、4、5、6引脚的定义和作用,1、2虽然已知为测试输入,但输入的测试信号的形式未知。
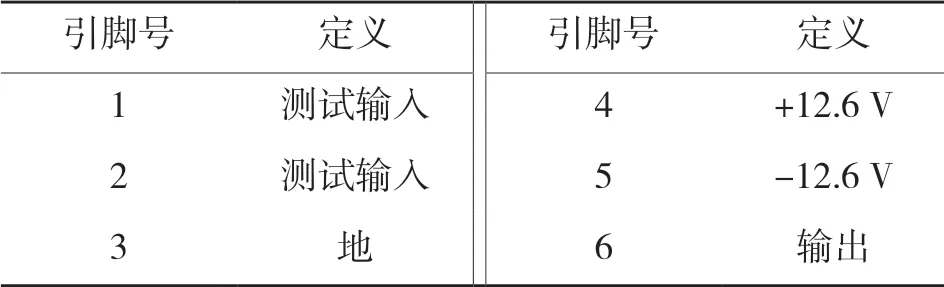
表1 引脚定义
1.2 传感器结构解剖及分析
对故障传感器进行分解,如图3所示,传感器由信号调理电路、感应传感器、力矩传感器线圈、永久磁铁、惯性质量块等组成。信号调理电路主要用于对传感器从输入量到输出电信号的转换、处理,输出为适合传输、记录或者能更好满足后续标准设备或装置要求的信号[4]。惯性质量块感知其测量方向的线加速度,并转换成与加速度相关的相对位移和力矩。感应传感器用来测量并转换因加速度引起的惯性质量块和传感器的相对位移。永久磁铁和力矩传感器线圈相互作用,平衡惯性质量块和传感器的相对运动。

图3 线加速度传感器分解图
根据图3绘制传感器的结构图如图4所示。各引脚的定义已在表1中给出。

图4 传感器结构示意图
假设飞行器沿Z轴做加速运动,加速度为a,则惯性质量块M沿Z轴有一个相对位移,并产生沿Y轴的惯性力矩MY,惯性质量块偏离原平衡位置。显然MY与加速度a成正比,相对位移方向与加速度方向相反。这时:

式中KM为力矩MY相对加速度的传递系数。由于惯性质量块的运动,感应传感器L5—L10中产生感应电流,该电流输出至放大器并转换成直流电流,此电流与MY成正比。电流经采样电阻两端(3,6)输出电压U。

式中K0为输出电压U相对力矩MY的传递系数,K为输出电压U相对加速度a的传递系数。同时,该电流输出至力矩传感器,在线圈L1、L2中产生感应电流,感应电流的磁场与永久磁铁产生的磁场相互作用,使永久磁铁沿与惯性质量块运动相反的方向运动,实现惯性质量块的位移反馈,使惯性质量块趋向于平衡位置。
2 线加速度传感器测试
根据上文分析的线加速度传感器的工作机理,选择4个飞行器对其传感器(编号aa、bb、cc、dd)进行测试(其中一个为线加速度传感器有故障的飞行器),将飞行器固定于转台上,并连接电路,如图5所示,利用重力模拟传感器感知加速度,对加速度传感器进行校准。在图5用电压表测量传感器的输出。随着转台的转动,电压表测量的传感器输出也随之变化,根据电压表的测量电压,可以采集到线加速度传感器在过载为-g~+g时的对应输出电压。

图5 试验电路
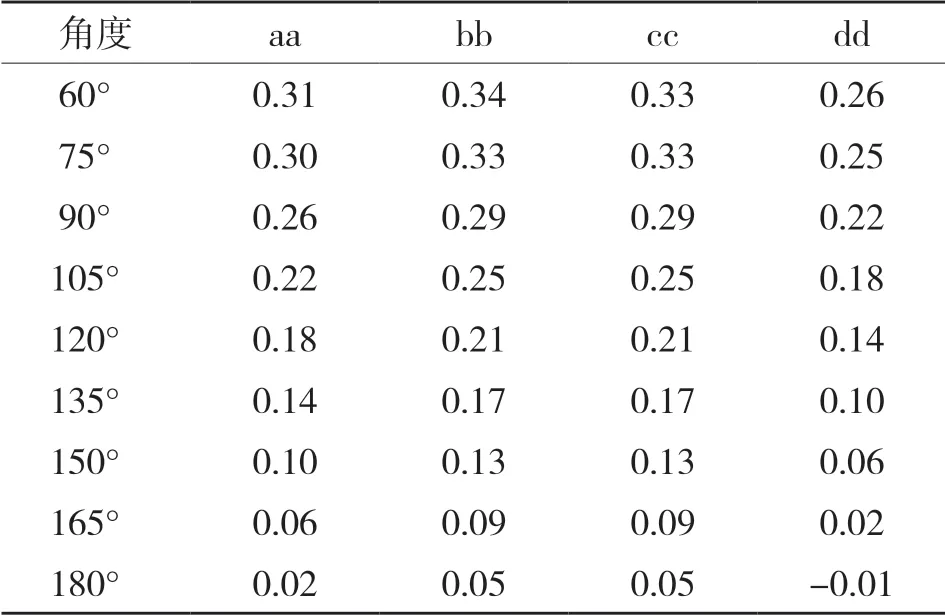
将飞行器在转台上按照刻度指示,从-165°旋转至180°,每旋转15°记录传感器的输出电压测量值,将测量值进行记录,结果见表2。
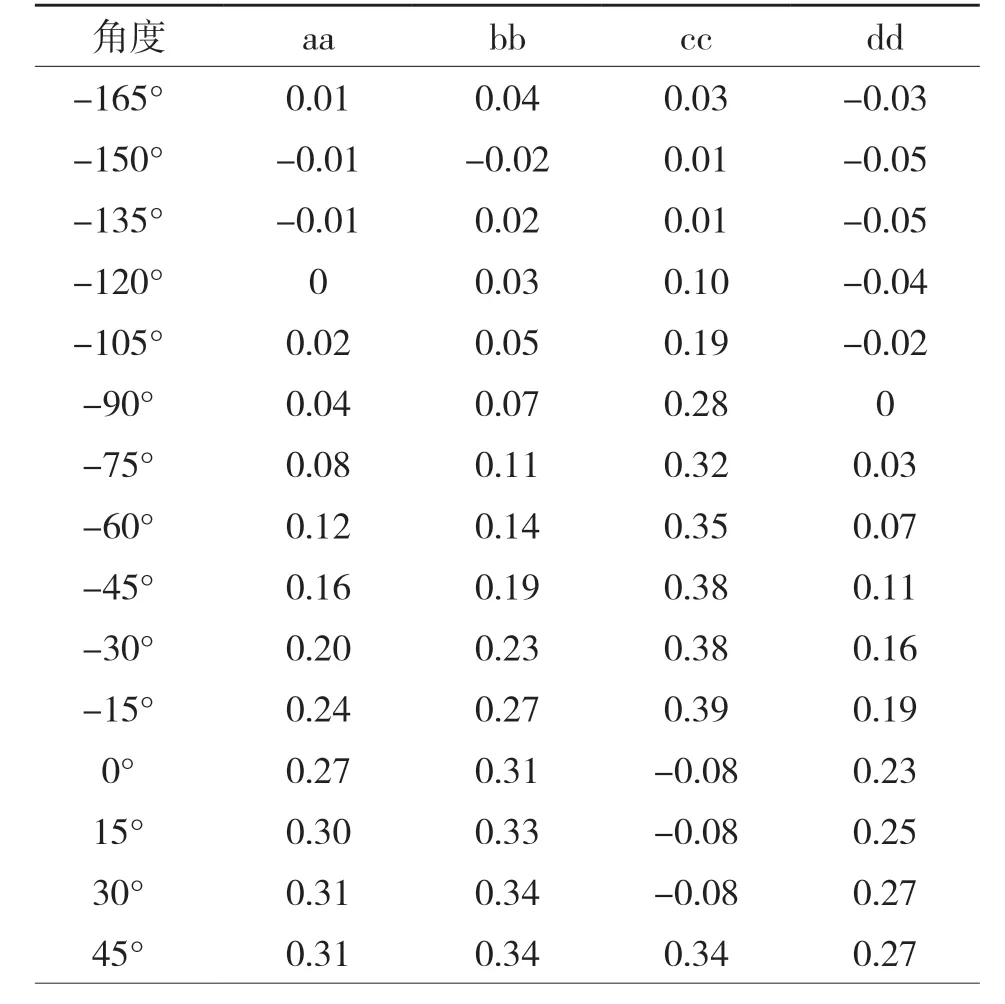
表2 试验结果 单位:V
(续表)
3 测试数据分析
3.1 测试数据绘图
在采集到传感器测试数据后,因为没有参考资料和测试依据可以证明传感器测试结果的合格范围,且测试结果从图表中看比较杂乱,无法直接看出传感器是否发生故障,只能对测试数据进行分析。对测试数据进行绘图,绘制输出电压与输入角度的关系曲线,X轴对应输入角度θ,Y轴对应输出电压U。如图6所示。
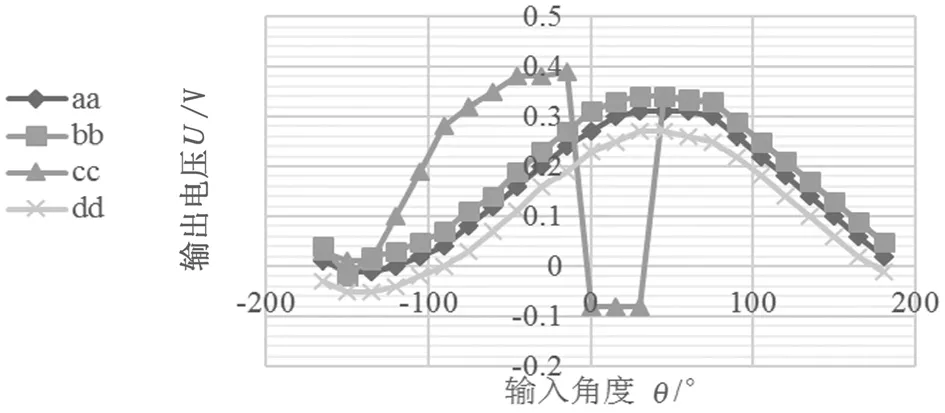
图6 数据采集结果
从图6中可以看出:
(1)传感器aa、bb、dd随输入角度增加,输出电压先减小(输入角度在-165°~-150°时)再增加至最大值(输入角度在-150°~45°时),然后再开始减小(输入角度在45°~180°时)。
(2)传感器aa、bb、dd的特性曲线比较平滑,没有出现数据大幅度跳跃的情况。
(3)传感器cc的特性曲线相对其他3个传感器出现了较大的数据跳跃,明显异常。
(4)传感器aa、bb、dd的特性曲线与余弦特性曲线近似。
3.2 基于线性化处理传感器故障判定
根据图6初步猜测编号为cc的传感器发生故障(在对飞行器总体进行测试时,cc传感器对应的飞行器确实发生了故障)。根据上述第4条,对于正常的传感器,根据图7假设输出电压U与输入角度θ存在余弦关系,即:

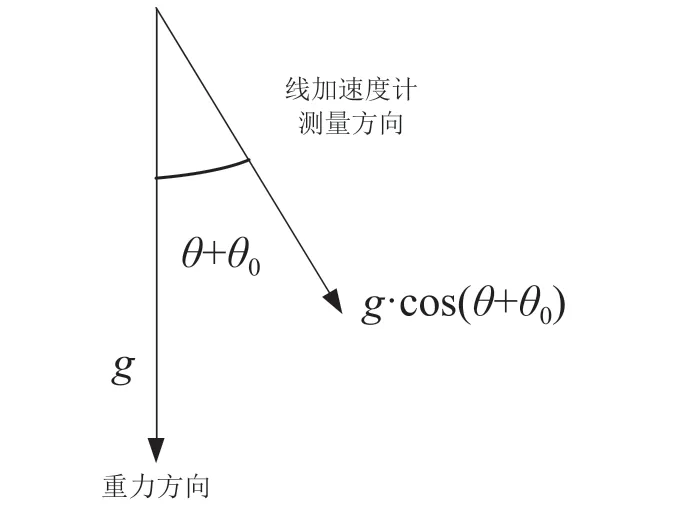
图7 线加速度传感器测量示意图
为了进一步对线加速度传感器的测试数据进行定量分析,按照公式(3)对传感器的输出电压与输入角度进行线性化处理,并绘制曲线,如图8所示。进行线性化处理后aa、bb、dd三个传感器的输入与输出都呈线性关系,且可以计算出k的范围为0.160~0.167,b的范围为0.109~0.180,只有cc传感器不是线性关系,表明cc传感器出现故障。
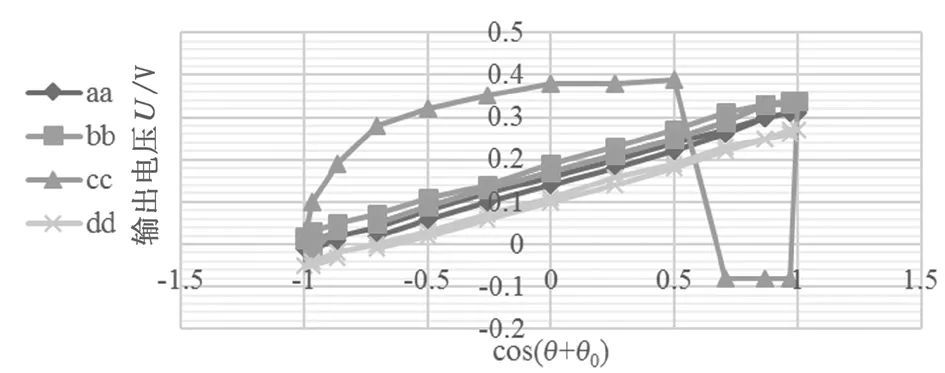
图8 线性化处理
4 结束语
通过对某型线加速度传感器进行测试,得到了在过载为-g~+g范围内的输出电压与输入加速度的关系。通过线性化处理,能够直观地判定并分离出故障的线加速度传感器(编号为cc)。该方法可以将飞行器安装在测试转台上直接实现(实际测试时飞行器也安装在测试转台),无需外加复杂测试设备,方法简单,可以作为一种排故手段。该方法的测试数据是通过在转台上旋转飞行器获得的,由于传感器的测量范围显然超过-g~+g,后续将研究采用更丰富的测试手段对传感器在-g~+g范围外的加速度进行检测,判断传感器是否出现故障。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
中等数学(2020年2期)2020-08-24
科学与财富(2018年30期)2018-12-28
测控技术(2018年9期)2018-11-25
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
计算机应用(2016年9期)2016-11-01
体育科技(2016年2期)2016-02-28
小朋友·快乐手工(2015年5期)2015-06-06