
智能汽车自动驾驶的控制方法分析
2022-12-23 09:36郑莉萍
科海故事博览 2022年34期
郑莉萍
(江铃汽车股份有限公司,江西 南昌 330052)
想要确保汽车在行驶过程中可以自动驾驶,所依据的就是复杂且多样化的传感器检测装置,以实现综合性分析车辆周围环境,最后在经过了精确的计算以后从中得到正确的控制指令,控制汽车一系列动作。本次在进行研究过程中通过探究智能汽车自动驾驶的控制方法,可以明确出驾驶控制过程中的方法以及具体的控制效果,确保智能汽车自动驾驶的控制水平得到明显提高。
1 自动驾驶状况以及智能汽车自动驾驶需求
1.1 自动驾驶状况
自动驾驶实际上是基于互联网技术中的相关算法、高灵敏度传感器和信息采集设备。综合收集车号信息,然后对其进行处理设计,使车辆在实际运行中能够收集到相关数据,最后根据控制系统来控制车辆的整个方向等相关操作。谷歌在2016 年将无人驾驶汽车引入城市,但wi-moi 在去年12 月取消了该项目。根据相关调查数据,目前,该公司汽车的自动驾驶距离已超过1.61×106 公里。在对比国外相关数据时发现,中国的自动驾驶研究主要是由汽车制造科学家研究所和大学进行的。
此外,网络和硬件技术在实际的开发过程中也日趋成熟,为自动驾驶奠定了良好的基础,并且对智能车辆的实际建设情况发挥着积极的意义。[1]
1.2 智能汽车自动驾驶需求
随着不断发展,我国电子科技水平也不断提高,为更好表现出电子科技发展过程中的整体水平,现阶段在实际发展中也开始将电子科技发展中应用的相关技术应用到众多领域。
另外,我国的现状在社会经济发展的过程中,人们在面对智能汽车过程中,对于驾驶方面的需求也已经开始发生变化。为确保智能汽车自动驾驶服务水平得到提高,有必要根据智能汽车驾驶的要求更换相应的智能驾驶控制系统,确保能在改造控制相关系统中为智能汽车自动驾驶控制水平的提高打下良好的基础。
所以,我国汽车工业发展进程中,人们也开始更加深入地探究智能汽车自动驾驶控制系统,希望能够进一步地控制智能汽车自动驾驶情况。
2 智能汽车自动驾驶产生的影响
2.1 降低交通事故发生率
车辆在道路行驶过程中,由于车辆较为复杂,而且变化快速,如果忽视了微小之处都有可能导致人员发生伤亡的情况。驾驶员在必要的操作过程中是很难做到高度集中的,传统驾驶方式并不能在复杂的道路环境中做出误判,加之在计算能力的限制下,超过了信息量存储器、处理装置上限,此时在驾驶过程中也会变得更加的困难,并不能确保行驶的安全性。基于此,依托于人工智能技术方式下的自动驾驶,能够有效解决存在的问题,降低交通事故的发生率。如果可以通过人工智能了解交通条件,可以做出最佳的选择与控制,这样在发生交通事故的概率上也会就明显下降。
2.2 支持整体环境的感知
现阶段,搜集自动驾驶信息的主要装置就是摄像头、雷达,其中摄像头具有较高的分辨率,而且在速度上也相对较快;雷达可以探测出更广的范围,而且具有较高的准确度。在自动驾驶过程中,为智能手机路线计划、自动控制提供高精度的自动驾驶,除了毫米波雷达,自动驾驶过程中也不可能离开激光雷达,依托于激光发射器来发射出激光,光束在遇到了物体以后就会反射回接收器,此时系统就可以结合发送、接收到的相关信息时间差来判断出物体之间的实际方向,最终结合反馈出的具体信息来提供相应的指令。[2]
2.3 可以提供更为准确的汽车驾驶警告
智能汽车在进行自动行驶以前,有必要监测好司机的整体状态,并且为具体的运行状态提供相应的警告,这也可以应用到重要的场所中。针对这一场面,依托于人工智能的方式,能够在一定基础上识别出司机在行驶过程中的身体姿势、眨眼频率以及视线的识别、疲劳状态等,最终绘制出立体的识别图。借助于人工智能技术的方式,智能汽车在行驶过程中可以搜集到相关信息,然后结合实际反馈情况了解到更加准确的预警信息,这样在驾驶智能汽车过程中会更加的安全。国家相关部门为了提高智能汽车在自动驾驶过程中的安全性,专门开发了一套风险判断以及处理模块,针对不同的道路交通情况,提供有效的警告措施。
3 智能汽车自动驾驶车辆控制模型的建立
想要确保整体控制效果得到明显提高,在模型控制过程中,为了保证车辆控制的准确性,需要根据实际的要求建立控制模型。本研究建立了智能汽车自动驾驶系统控制模型,具体包括了以下几点内容:
第一,智能汽车自动驾驶系统也需要对其进行监督,由于在整个系统控制过程中转向、转角都与车辆的整体控制情况有很大的关联,为保证运行控制效果可以更好地表现出来,有必要在建立模型时站在道路行车、方向盘转角、车辆间距控制等方面设计。
第二,在建立模型时,有必要严格按照智能车辆自动驾驶控制要求建立起坐标系模型,并将大地坐标系控制作为核心主体,结合实际情况调整好坐标系控制的设计,以保证在调整控制模型时,建立更加完善的控制系统。如果站在相关参数、车辆行驶控制系统的角度上来说,通过以此为基础来描述相关功能,那么相对应的就是汽车行驶的速度和状态。只有智能车辆自动驾驶控制系统才能在相应的描述功能控制中进行监督。建模时,也要严格按照车辆仿真系统要求展开,结合控制系统中的数据来做出合理的调整。
第三,按照智能汽车自动驾驶控制要求,设计了自动驾驶控制全过程中的驾驶模型。根据具体的控制要求,对控制工作的实际控制情况、车辆路况、方针信息做出准确分析。其中,车前监控状态、系统控制反馈是一个共同体。由于车辆内部反馈系统和车辆智能监控系统的及时调整,在整车控制中起着非常重要的作用。[3]
4 智能汽车自动驾驶车辆道路状况识别
道路信息的识别与处理在智能汽车自动驾驶汽车的控制过程中起着非常重要的作用。只有保证行车中的道路信息安全,才能对行车中的车辆进行有效的监管,才能显示出行车中的车辆的监管效果。例如,针对GPS 定位系统来说,智能汽车自动驾驶控制过程中调整了车辆的路况,在具体的路况识别和监控中严格按照相关要求对监控中的信息进行识别。
根据智能汽车自动驾驶车辆道路监督控制中道路识别情况可知,在识别整个车辆的道路情况时,选用的是状态识别监控系统,在实际运行的监控过程中也严格按照车辆的相关要求,通过这种方式有效地识别道路的整体状况。如果将t 代表车辆监管过程中的时刻,在具体的状态监督基础上,整合道路状况识别情况,只有采取这种方式才能实现在相应的识别和监管工作中有效控制,提高整体监督水平。
如果车辆在识别道路时需要转弯,则在汽车监督控制过程中,有必要严格按照相关要求来监督现有车辆转速、转向、速度变化等情况,严格按照车辆的监管要求对车辆的整个运行状态进行监管。如果是识别车辆的运行状态、道路状况,由于已知量发生了变化,导致监控车辆运行状态的实际变化时,转向对监控的纵向偏移和变化趋势,在此基础上,为了更好地满足车辆在监控和控制的情况下的需求,有必要建立出车辆状态的监控形式。即:
根据以上公式显示,K 代表的是汽车在加速时的比例系数,a 代表的是未知量,Ψ 代表的是车辆在行驶时方向盘的转角。在车辆道路识别过程中,车辆整体状态信息也出现了转变,为了提高车辆运行中的实际情况,有必要严格按照车辆监督管理实际实施要求进行,控制好车辆方向盘在进行转向时的角度,以这种方式提高车辆在自动驾驶车道中的实际识别能力。[4]
5 模糊自适应PID 自动驾驶系统
在智能车辆自动驾驶车辆控制中,为了更准确地显示车辆自动驾驶控制过程的整体水平,就需要在自动驾驶过程中严格按照车辆的实际要求,改变整个控制系统,对车辆进行更科学的控制。在本次研究过程中也专门应用了模糊自适应PID 自动驾驶系统,并且将其作为车辆在进行自动驾驶控制中所采取的具体方法,对车辆运行过程中程序和参数的变化进行监控。同时,在车辆监管过程中要严格遵循相关要求。对整车在运行监督算法模型中的实际情况进行了计算。传统的模糊控制是用来调节监控过程中相关参数的变化和适应能力的。自动应用模糊控制系统,智能车辆自动控制的传动效果也会转变,并且伴随着车辆的监督、运行情况进行。此时,车辆在自动控制的方向以及存在的误差点方面都有下降的情况出现,在其中对整车的自动驾驶控制起着重要的作用,只有严格按照相关要求进行车辆的监督和控制过程,采用模糊自适应PID系统控制方法,通过采取这种方式将能够确保自动驾驶控制水平的提高。
图1 是模糊自适应PID 自动驾驶系统图,其中e、ec 分别代表的是转向角误差以及误差的变化率情况。自适应模糊PID 控制器在车辆行驶中,会对e、ec 进行不断的检测,而且也需要结合模糊推理情况采取在线整定三个参数的方式来满足不同e、ec 下对于PID 控制参数的实际需要。智能汽车的控制器借助于独立的线程采集转向角,以这种方式计算出转向角存在的误差以及误差的实际变化情况,然后对其展开模糊推理,控制好智能汽车上的方向盘转向情况。
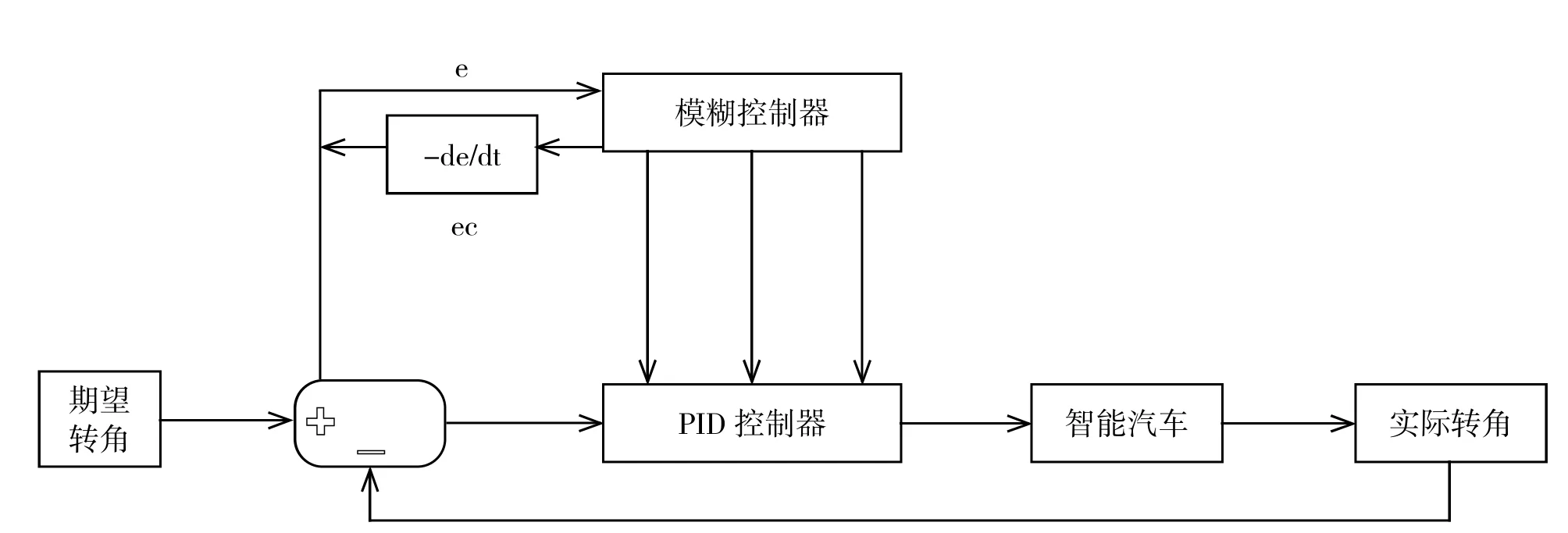
图1 自动驾驶系统框图
6 智能汽车自动驾驶控制仿真验证
智能汽车自动驾驶控制中,有必要严格地按照具体要求展开,并且将具体的实验方案进行科学的控制。在经过相关实验以后,显示出的最终结果是:在实际控制阶段中,还可以依靠模糊PID 控制系统进行扩展,从而有效地控制车辆在实际运行中的状态,监督实际控制方式,紧密结合车辆在实际运行过程中的状况,紧密结合建立仿真模型时的相关要求,科学合理地验证自动驾驶,这样能够进一步地确保智能汽车在自动驾驶控制中的有效性。
通过分析车辆模糊自适应PID 控制结果显示,现阶段车辆自动驾驶控制技术水平处于不断提高的趋势,相应的依托于模糊的方式来进行有效控制,必定能够确保产生的变化更加的稳定,提高整体的控制效果。在这一过程中为了能够更好地监督车辆的效果,也需要严格地按照相关要求展开,调整好自动车辆瞬时加速、车辆速度控制的时间,通过采取这种控制方法,可以更好地满足车辆自动驾驶中的实际需求情况,保证自动驾驶中更加的安全。[5]
7 结论
随着智能汽车自动行驶技术的快速发展,这也代表着人工智能、自动行驶技术已经实现了融合。在我们日常生活中汽车行驶方式也不断地被人工智能技术所改变,在这一背景下也可以从中发现自动驾驶能够给人们带来惊喜的一面,同样的人工智能仪器也逐渐被人们所重视。
猜你喜欢
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
疯狂英语·新读写(2021年10期)2021-12-07
成都信息工程大学学报(2021年2期)2021-07-22
青年歌声(2020年12期)2020-12-23
学生天地(2020年5期)2020-08-25
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
汽车博览(2016年9期)2016-10-18
读写算·高年级(2015年1期)2015-07-25
