
无人机用智能充电坞设计
2022-12-22 06:07:42朱永梅
科技创新与应用 2022年35期
刘 硕,管 伟,朱永梅,王 佳
(江苏科技大学 机械工程学院,江苏 镇江 212003)
无人驾驶飞机(Unmanned Aerial Vehicle,UAV)简称无人机,是一种通过远程操控甚至无人操控的智能化飞机,常用于军事领域,巡逻监察,带载作业等。收放技术是UAV配套技术中相当重要的一个部分,保证UAV的可靠作业。
其中海军装备技术研究所姚智刚等[1]调研发现英国的Caley公司研发了吊臂式无人艇收放机构,能够保证在6级海况条件下安全起吊工作艇、救生艇及其他大型橡皮艇,其是经SOLAS等国际权威机构认可的船用吊艇设备。目前在世界各国的船舶上广为应用。法国ECA集团和比利时海军与机器人公司(BNR)联合测试了前者研制的一种无人艇横向施放和回收系统,这套施放回收装置的吊臂系统采用稳定性更高的两点式吊接,这不仅能在扫雷艇航行中保持无人艇的稳定,还能方便船员对无人艇进行维护,更换载荷;其安全系统,负责将无人艇锁定在母舰的无人艇舱位处,防止在航行中无人艇出现晃动。Sarda等[2]设计了一种双体无人水面艇(USV)通过其投放带有缆绳连接的翼型钩锁,再利用自主式水下航行器(AUV)对钩锁进行定位完成物理对接,进而USV回收钩锁,将AUV拖曳至回收槽位并完成固定,最终完成对USV的回收。广州船舶及海洋工程设计研究院陈海光团队[3]设计了转运式尾滑道无人艇收放机构,并已完成试验型的建造与试用。
上述研究者对无人艇收放技术已经有所研究,然而,与UAV相匹配的配套技术却处于相对滞后的状态,尤其是发射与回收(launch and recovery,L&R)。本文提出并设计用于无人机收放并进行无线充电的充电坞方案,其中包括浮力支架、锚定系统、收放机构和无线充电装置4部分。
1 方案设计
1.1 技术要求
(1)能够精准地对无人机进行收放作业,包括在水面3级海况以下能完成无人机的回收与释放,并且能长时间保持无人机在停降状态下限位固定在整个充电坞上。
(2)能对无人机在一定的收放精度误差范围内及无人机或无人机相对充电坞有一定的晃动时进行高效率的无线充电,能在3级海况以下的环境对无人机进行持续的高效率无线充电。
(3)充电坞在不同环境下能保证自身的蓄电池在一定的电量储备容量内,即离岸式的充电坞能依靠太阳能、波浪能和潮流能等自主获取能量来保持自身供电及对无人机的供电顺畅,实现多个无人机的电量监控和电量管理。
(4)当面对集群式无人机作业时,能在一定水域范围内设置多个充电坞进行联合作业,完成充电坞相互之间的通信及和各个外载的无人机进行通信。
为达到上述性能需求,充电坞技术参数见表1。

表1 技术参数
1.2 方案设计
充电坞的根本目的就是要为其他移动载具进行能源补给续航[4-6],同时与各个移动载具和其他充电坞之间进行通信。所以其必然是要长时间在水上待机作业。与此同时还要能精准地收放各个移动载具,与载具的无线充电对接,以及保证在对接完成后进行无线充电时持续保持对接状态。本文采用模块化设计、通用化设计等,根据应用场景来替换充电坞上的配件装置,同时还要适应多种海况、多种类型及体型大小在一定范围内变化的无人机。结构上要保持轻量化,避免后期的维护工作难以进行等。
离岸式充电坞通常是需要长时间漂浮在水面上,所以其面临的最大问题就是在水面上的稳定性。同时充电坞还要承载一些储备能源与收集能源的设备,外加承载一架无人机的整体重量和多个无人机的部分重量。这些要求也对其漂浮稳定性提出了更高的要求与考验。所以,首先要解决的就是为充电坞提供浮力的结构设计问题。
充电坞搭载的设备虽然都有防水设计,但是在对无人机进行无线充电时,倾覆带来的进水仍然是很危险的,极其容易损毁整个设备。另外,充电坞要完成对集群化的无人机群进行无线充电,所以其要能同时承载多个无人机进行无线充电。这带来的问题是充电坞会承载过多的重量,且在面对非满载无人机的情况下,回收的无人机对充电坞施加的合力会不均匀,导致充电坞会向某个方向倾斜。这种情况下,再加上波浪的影响很容易会发生倾覆。因此,本充电坞采用了开放圆周式设计结构,如图1所示。
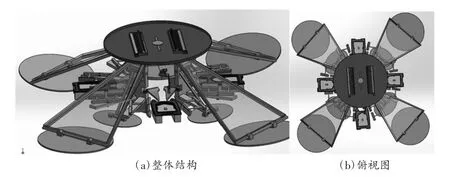
图1 充电坞整体结构
2 关键部件设计
2.1 浮力支架
4个浮力支架是均等分布的,通过浮力支架底部连接的浮力板来为整个充电坞提供浮力。浮力支架如图2所示,其根部与平台主架体连接,而且可以通过伺服步进舵机来进行驱动,使得浮力支架可以改变与平台主架体之间的角度。

图2 浮力支架
浮力支架采用镂空设计,在保证合适强度的同时,可以通过镂空来内部镶嵌太阳能板。为了节省空间,则在浮力支架的中间嵌入太阳能板,正好可以全方位地来收集太阳能,且常态下的浮力支架是与平台主架体形成一定的角度,以此更加方便收集太阳能资源。
浮力板与浮力支架连接处采用鱼眼轴承来连接,赋予其绕浮力支架连接杆的方向的自由度,使其在面对波浪时能自适应改变与波浪接触的角度,使得浮力板能始终保持提供正半轴方向(即与水平面呈小于90°的方向设定为正半轴)上的浮力矢量,避免水淹没浮力板而导致浮力板承受部分水的重力进而减少浮力,也避免因此产生不必要的阻力矩和导致充电坞产生不必要的晃动。综上所述,利用均等分布呈辐射型向外的4个浮力支架作为“分界线”将平台主架体平均圆周等分为4个部分,在任意2个浮力支架之间的位置设计为无人机的收放舱位,这样可以在最大程度上保证充电坞水面稳定性的同时大量扩展无人机的收放舱位。
2.2 锚定系统
长时间处于水上作业的充电坞具有其固定的工作区域,而同时又要满足其可快速部署的要求。一般要求充电坞具有快速定位功能,以及快速部署功能。所以,常见的会采用海洋浮标的锚定系留系统,而非海洋平台的固定桩。锚定系留系统可以实现快速部署及快速回收。
单点式系留系统只由1根缆绳连接系泊锚,其优点很明显,便于部署投放及回收,而且结构简单,故障率相应地也很低。重要的是其固定效果好,全方向的限位范围较小,能将待锚定的水上装置锚定在较小的范围内。原因在于其绳索的长度是有限的,工作时又处于绷紧状态,出现的弹性伸缩也较小。依据本课题的应用场景,单点式系泊系统中,张紧型和弹性张紧型足以应对目标需求的锚定功能。
2.3 无人机收放机构
无人机的收放作业面临的最大问题是,如何保证无人机能在无人机停降平台上稳定完成无线充电[7-9]及在高海况的情况下如何回收无人机。所以最终的目的还是要对无人机进行精准的限位固定。本方案采用了在无人机停降平台的中心部位设置2排能够凹陷的铰链结构,如图3所示,用以容纳无人机的2个起落脚架。这2排收放机构的长度与宽度均大于无人机的起落脚架,收放机构的内侧带有方向相反朝向外侧的钩状结构,由于铰链结构是交错布置的,在收缩状态时是处于互补状态,用以锁紧无人机。

图3 无人机收放机构
整体的收放流程如下:在无人机未停降时,整个无人机收放机构是展开状态,即铰链结构展开至与无人机停降平台同一个平面内。此时,无人机开始通过视觉引导来进行停降,无人机视觉识别的特征物是无人机收放机构的中心。无人机因外界干扰因素及充电坞自身的晃动因素,其产生了停降误差范围,此时无人机进行停降后,其整个机体与无人机收放机构的铰链结构槽位产生了一定的角度,并且在x轴与y轴皆与停降平台中心呈现一定的误差距离。在无人机接触停降平台后,触发红外光电传感器,在无人机接触平台的一瞬间,铰链机构开始收缩,直至收紧,开始充电。
2.4 无线充电机构
本文设计了一种通过直线导轨搭配红外光电传感模块来自主寻找无人机的方案,如图4所示。经过前文的无人机收放机构的位置与姿态归整,无人机只会在沿着起落脚架的方向在停降误差内降落,所以直线导轨只需要搭载红外光电模块在固定的一条直线上反复巡回,则必然能搜寻到无人机的位置,进而完成无线充电模块的对接作业。
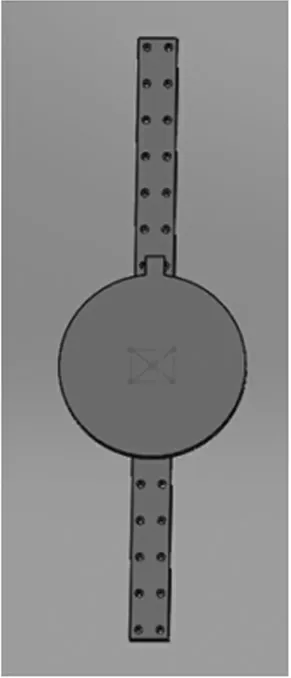
图4 无人机无线充电对接机构
3 结束语
充分考虑了充电坞在水面的晃动问题,设计了主动减摇装置——浮力支架,通过提供浮力矢量来使充电坞在水面上尽量保持稳定,进而便于移动载具设备的收放作业。设计了圆周开放式的平台主架体,增加了可容纳无人机的数量。拓展了在平台主架体上的槽位,令其通用化的接口可以搭载多种设备,包括收集能量的太阳能装置、浮力支架及震荡浮子式波浪能收集装置等。同时,还设计了无人机收放机构及无人机无线充电机构。无人机限位机构可以辅助无人机在晃动的平台上降落,使其在切断动力的瞬间即可完成凹陷式限位固定,利用无人机自重及斜槽钩型结构将其位移至停降平台的中心,以便于后续的无线充电机构的对接。再通过巡回式的无线充电对接机构自主寻找无线充电接收端,完成无线充电对接。
猜你喜欢
江苏安全生产(2023年1期)2023-02-08 05:57:50
江苏安全生产(2022年6期)2022-07-29 01:22:32
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:40
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:36
江苏安全生产(2021年5期)2021-07-16 06:47:16
原子与分子物理学报(2021年1期)2021-03-29 07:29:14
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
岷峨诗稿(2017年4期)2017-04-20 06:26:43
