基于COMSOL的激光超声金属表面裂纹参数检测的数值仿真
2022-12-16 09:23:06陆思烨张兴媛金桢玥
计算机时代 2022年12期
陆思烨,张兴媛,金桢玥
(上海工程技术大学航空运输学院,上海 201620)
0 引言
随着金属零件服役时间的增长,表面会逐渐形成各种形状的缺陷,这些缺陷如果不能及时检测到,就可能造成重大的安全事故[1]。因此就需要按时对金属零件进行缺陷的检测,从而预防事故的发生[2]。激光超声检测技术,是一种较为新颖的检测方法,通过其激发的声表面波对表面缺陷的高灵敏度,在无损检测领域中得到广泛应用[3]。
目前,在激光超声检测方面,ZHOU通过声表面波的反射系数和透射系数来对表面的缺陷进行定量评估[4]。陶程使用有限元分析方法对不同温度下的表面缺陷进行了研究[5]。闫怡旭基于有限元法求解计算得到激光热弹激发出声波的传播规律和缺陷回波[6]。为了进一步研究声表面波与金属表面裂纹之间的相互作用,本文将通过COMSOL Multiphysics 软件,建立有限元模型,从表面波的反射现象对裂纹的深度进行研究。
1 有限元模型的建立与理论基础
1.1 建立模型和参数设置
使用COMSOL 软件进行有限元分析的步骤主要为:定义需要求解的问题类型、绘制几何模型、定义每一个求解域的材料属性、设置载荷和边界条件、划分网格、模型求解、后处理、修改与优化。
如图1所示,在COMSOL软件中建立一个20mm×8mm的矩形,在x=2mm处添加深1mm,宽0.2mm的裂纹。材料定义为Aluminum6063-T83,材料参数如下:密度2700kg/m3,杨氏模量69×109Pa,泊松比0.33,热膨胀系数2.34×10-5K-1。激光光源为线光源,光斑半径为0.3mm,脉冲上升时间为11ns,激光源位于x=-5mm 处,在激光源右侧2mm 处开始设置探测点,裂纹左侧有五个探测点,间隔1mm,裂纹右侧有两个探测点,间隔1mm。裂纹的深度和宽度在下文中均有变化。网格划分如图2所示。
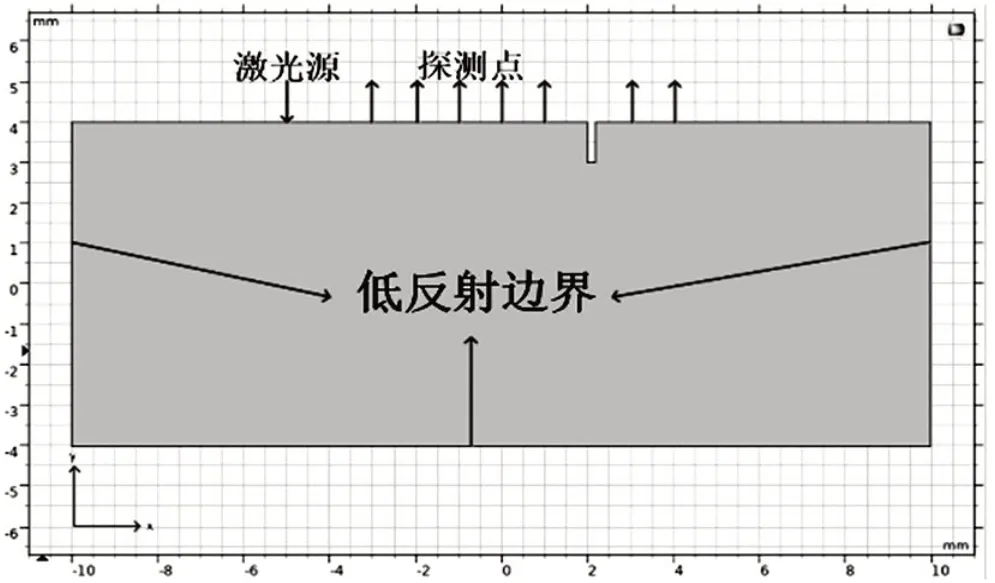
图1 有限元分析模型

图2 网格划分
1.2 激光超声理论基础
激光作用于固体表面后,会分别产生纵波、横波、表面波等超声波[7],不同波形的传播方向和速度均有所不同,纵波和横波主要向材料内部传播,而表面波主要在材料表面传播,表面波在与表面裂纹相互作用后,会发生反射和透射,对应的分量为反射波和透射波,根据此原理可以对表面裂纹的参数进行研究分析。
在热弹机制下,热源q可以表示为[8]:

f(x)和g(t)分别为脉冲激光的空间分布和时间分布,分别表示为[9]:
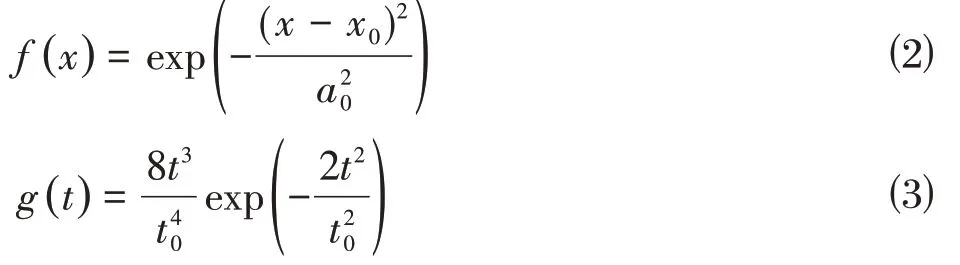
其中,x0为激光线源中心的横坐标,a0为激光线源的光斑半径,t0为脉冲激光的上升时间,E0为激光线源单位脉冲能量,A(T)为材料表面对入射激光的吸收率。
本文中采用的有限元分析,单位脉冲能量为2mJ,为了简化计算,可以假设激光能量被材料完全吸收,A(T)为1。
2 有限元仿真结果与分析
2.1 超声波的传播特性
如图3(a)所示,激光作用于金属表面后,会产生不同模态的超声波,首先产生纵波,其次是横波和表面波。纵波的传播速度最快,横波和表面波次之。当超声波传播到裂纹前沿时,表面波与其作用后,一部分会从传播的相反方向发生反射,主要的反射分量为RR和RS,另一部分会透过裂纹继续传播,发生透射,透射分量为RT,如图3(b)、(c)所示。

图3 激光激发超声后不同时刻的超声波位移云图
2.2 声表面波反射分量到达时间的计算
声表面波与裂纹相互作用后,产生的反射分量和透射分量对分析裂纹的参数非常重要。由于透射分量的机理较为复杂,本文主要研究反射分量的到达时间。反射分量RR和RS到达时间的计算公式如下:
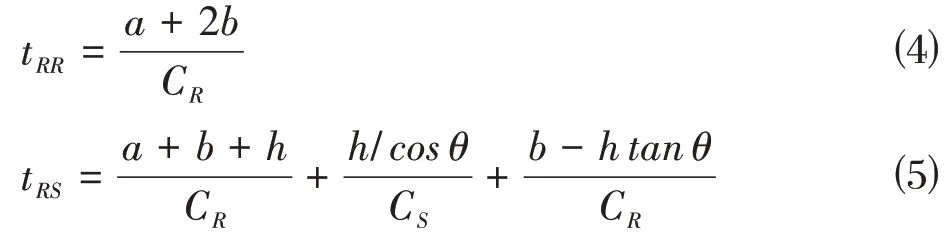
其中,a 为线源中心与探测点之间的距离,b 为探测点与缺陷前沿的距离,h为裂纹深度,θ为RS 波传播时与缺陷前沿的夹角,近似取30°,CR、CS分别为表面波和横波在材料中的传播速度,根据所设置材料的参数,可得到分别为2889m/s和3100m/s。
2.3 声表面波与裂纹相互作用后的时域特性
声表面波在金属表面传播过程中,与裂纹相互作用后,相比于无裂纹模型,在时域上会出现明显的反射信号,如图6所示。根据式(4)和式(5),可以计算出RR 和RS 的到达时间大约对应于图4 中P、Q 两点。Q 点的选取依据为相邻的波峰波谷连线的拐点。
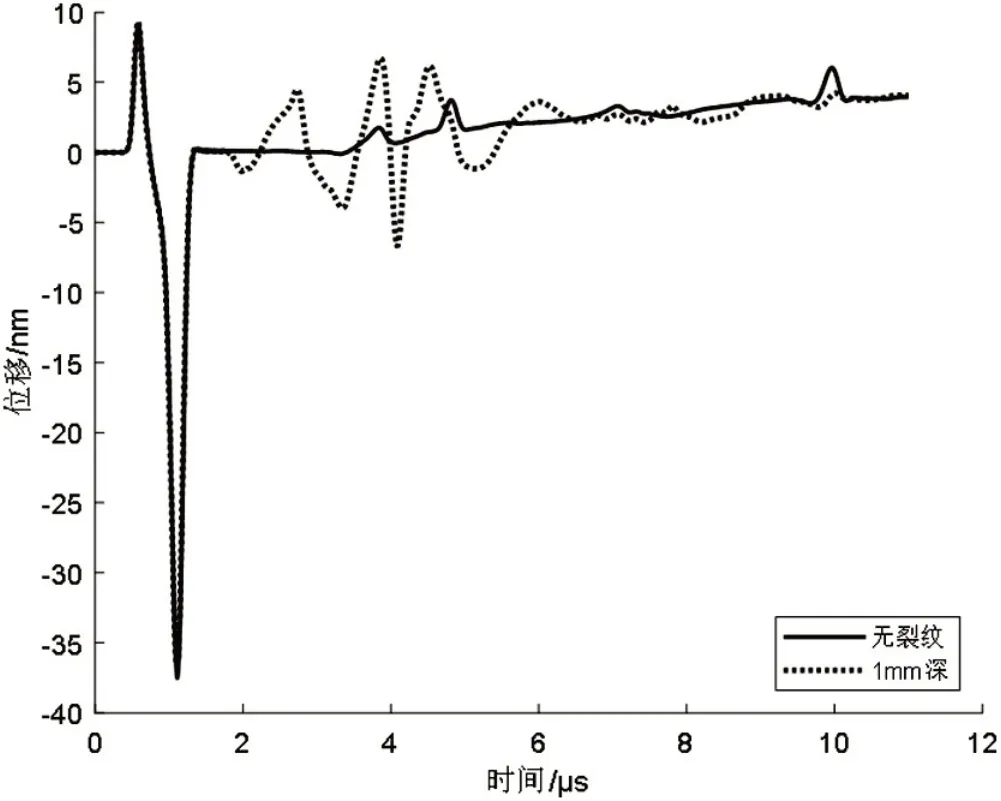
图4 无裂纹模型和1mm深裂纹模型在(-2,4)的时域信号
2.4 不同裂纹深度下的时频信号
本节中通过改变裂纹深度,来研究其对声表面波反射分量的影响,如图5 所示,当裂纹深度发生改变时,对于RR 的到达时间没有影响,而对于RS 的到达时间则有一定的影响。当裂纹深度为0.5mm 时,可以看到,时域信号中并不存在2.3 节中介绍的拐点,而当裂纹深度分别为1mm、1.5mm 和2mm 时,拐点对应的到达时间随着裂纹深度的增加有所滞后。

图5 不同裂纹深度(0.5-2mm)在(-2,4)的时域信号
根据式⑸的计算公式可以看到,RS的到达时间与裂纹深度是有一定关系的,且从RS 的机理分析可以知道,裂纹深度较小时,RR 和RS 由于速度相近可能会发生耦合,导致在时域信号中难以精准找到RS 的对应点。
因而,在裂纹深度较大的情况下,通过RS 的到达时间可以反得到裂纹的深度。以1mm、1.5mm 和2mm深的裂纹为例,RS到达时间从时域信号中获取分别为4.35μs、4.54μs 和4.85μs,代入式⑸,得到的裂纹深度和相对误差如表1 所示,可以看出通过RS 的到达时间,对深度范围1-2mm的裂纹检测误差较小。
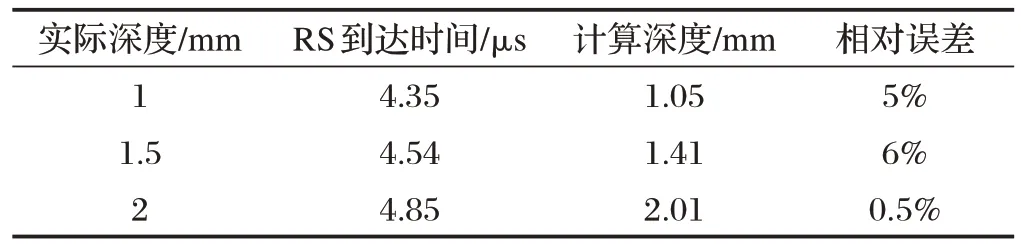
表1 根据RS到达时间计算裂纹深度
图6为不同裂纹深度下表面波在(-2,4)处的频谱图,可以看到,裂纹深度为0.5mm 时,在1MHz 处对应的振幅相比深度较大时的振幅较小,因此可以判断裂纹深度对某一频谱分量对应的振幅会产生一定的影响,可据此对裂纹的深度范围进行划分。

图6 不同裂纹深度(0.5-2mm)在(-2,4)的频域信号
3 结论
本文对存在不同裂纹深度的Aluminum6063-T83材料模型进行了有限元分析,使用COMSOL Multiphysics软件中的边界热源作为激光源,模拟了激光线源。在时域和频域上对不同裂纹深度进行研究与分析,得出的结论为:对于1-2mm 深的裂纹,通过RS的到达时间可以估算出裂纹的深度,相对误差在6%以内;在频域信号中,随着裂纹深度的增加,频谱中某一分量对应的振幅会增加。本文所提出的方法,可为激光超声对于金属表面裂纹参数的检测提供参考。
猜你喜欢
基层中医药(2021年12期)2021-06-05 06:56:26
智族GQ(2019年9期)2019-10-28 08:16:21
电子制作(2018年23期)2018-12-26 01:01:20
测控技术(2018年5期)2018-12-09 09:04:34
测控技术(2018年11期)2018-12-07 05:49:02
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
电子测试(2018年9期)2018-06-26 06:46:16
纺织科学研究(2017年6期)2017-07-03 12:14:15
光学精密工程(2016年6期)2016-11-07 09:08:13
系统工程与电子技术(2016年7期)2016-08-21 13:59:14