
基于图像处理的操动机构运动特性检测
2022-12-14 10:22:52钟建英刘煜陈培军董华军库照宇
大连交通大学学报 2022年5期
钟建英,刘煜,陈培军,董华军,库照宇
(1.平高集团有限公司,河南 平顶山 467000;2.大连交通大学 机械工程学院,辽宁 大连 116028)
随着社会经济与科技的发展,电力系统在国家发展中的地位日益重要,对电力系统运行过程中的可靠性有更高的要求.断路器作为电网中控制及保护系统安全可靠运行的电气设备,其开断能力对保证电力系统的安全运行有重要意义[1-3].断路器主要机构可分为触头系统、灭弧系统以及操动机构三部分,操动机构在电力系统出现故障时是否可以实现可靠运动,是决定断路器能否及时开断电流的关键因素[4-6].操动机构作为断路器的储能及控制元件,其分闸能力决定断路器开断电流的能力,如何精确测量操动机构的分闸速度,是研究断路器开断能力的重要目标.
目前针对操动机构分闸速度检测的方法主要为传感器法.传感器可以分为传统传感器和光学传感器.传统传感器常用的为电阻传感器,电阻传感器可以把应变信号转换为电信号,可以对位移、加速度等进行精确检测(最大误差约为0.1 m/s),广泛应用于实验研究中,但其易受电场、磁场、气流等的影响,不宜用于断路器操动机构的分闸速度检测.学者们通过安装位移传感器的方法测量操动机构的运动速度,但其精度难以保证,为提升精度,学者们进行大量研究,取得一定成果,但都存在一定的局限性[7-9].光学传感器是依据光学原理进行测量的,具有非接触、非破坏、高速传输、抗干扰能力强等优点,其主要可分为激光传感器和图像传感器,激光传感器具有速度快、精度高等优点,但是其对时间测量精度要求高,更适用于远距离测量[10].图像传感器即感光元件,通过高速相机对目标进行图像采集,并通过图像处理方法得到较高精度的测量结果,但是,图像处理往往需要通过复杂的编程来实现[11].综上可知,通过图像传感器的方法可以有效识别运动过程中的运动参数,获得较高精度的速度检测结果,但是现有精度仍存在一定不足.
为有效提高操动机构分闸速度的检测精度,本文基于图像处理检测方法,并结合LabVIEW平台提出一种新的速度检测方法,并采用该方法对操动机构分闸过程中的各个运动参数进行高精度检测.研究结果为断路器开断性能特性研究提供技术参考.
1 实验方法
1.1 实验设计
操动结构的分闸速度检测系统可以分为两部分,即图像采集与图像处理.图像采集步骤,见图1.该系统以操动机构为核心,通过控制平台和快速分闸触发回路的协同作用实现断路器的分闸运动,并使用高速相机对断路器分闸过程中操动机构的运动图像进行采集.对采集的运动图像进行分析,得到操动机构分闸过程中的运动参数,其流程见图2.

图1 图像采集

图2 图像处理
实验采用的操动机构为液压操动机构,可分为储能元件(电机、油泵和储能器)、控制元件(电磁铁和阀系统)、执行元件和辅助元件(油箱、压机开关和管路)四部分,具有输出功大、动作时间短、操作平稳无噪声等特点,广泛应用于高压输电中[12].本实验中操动机构的最大工作电压为1 750 V,斥力盘与缓冲装置距离为10 mm.
实验通过高速相机对操动机构的运动状态进行图像采集,并基于LabVIEW操作平台对采集的动态图像进行分析处理.
实验中图像采集所用的相机根据传感器的不同可分为CCD相机和CMOS相机,CCD相机比CMOS相机成像质量和色彩更好,但CMOS高速相机具有快速采集、抗干扰能力强、功耗低以及可靠性高等优点,更满足本实验的要求,因此选用CMOS相机[13].
实验选用德国Lavision公司的高速相机,最大分辨率为1 080×720,满幅拍摄频率为12.68 kHz,由于直接针对灭弧室中的触头运动进行图像采集比较困难,而操动机构的斥力装置为断路器的动力元件,其运动状态可以反映动触头的运动状态,因此本实验采用高速相机针对操动机构的斥力装置进行图像采集,为提升图像处理中的数据精度,对斥力装置进行标记,其实验布置示意图见图3.
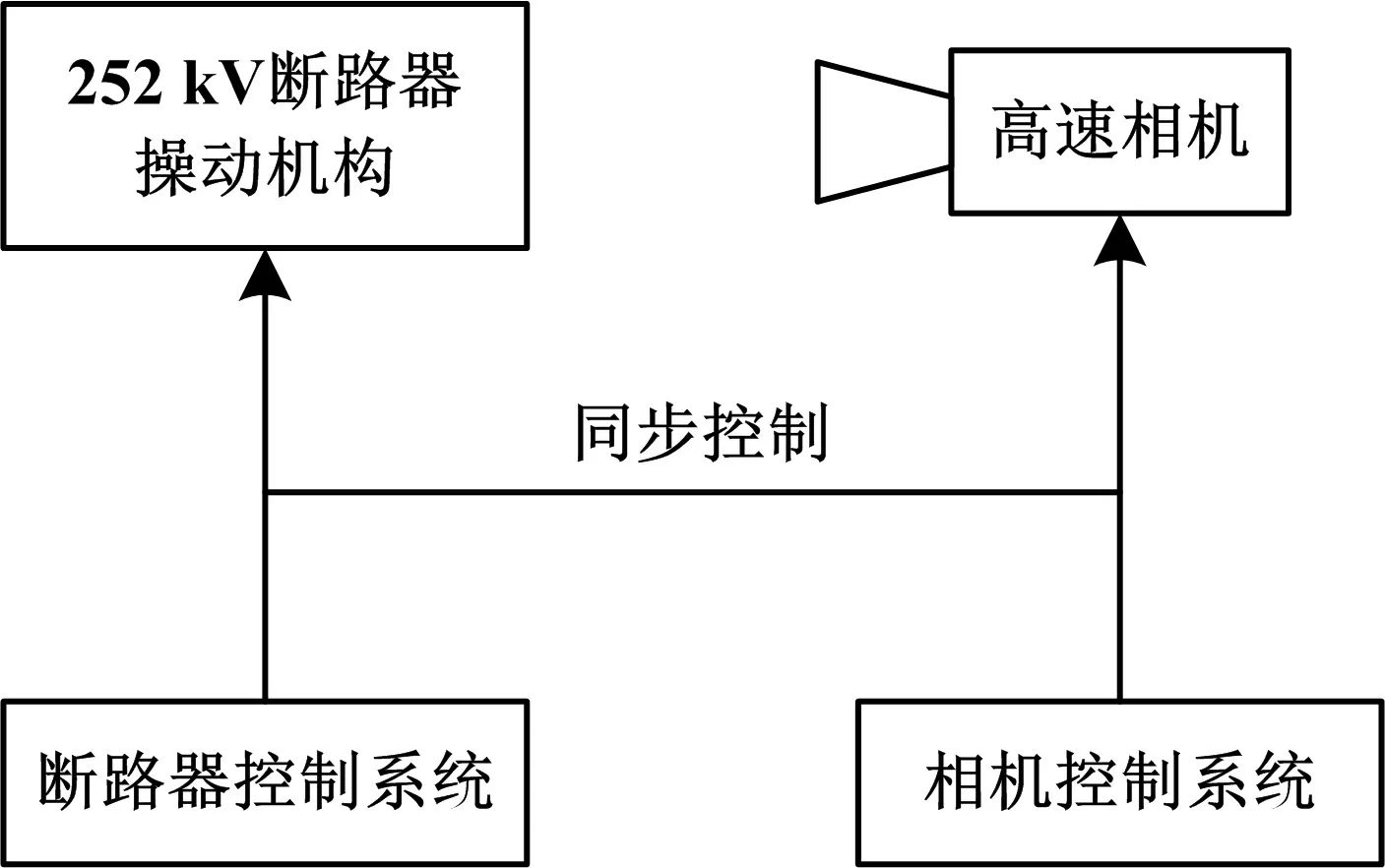
图3 实验布置示意图
1.2 实验步骤及原理
1.2.1 实验步骤
具体实验过程可以大致分为开始实验、图像采集、图像处理和数据分析四步.通过控制平台控制实验设备进行实验,利用CMOS高速相机采集操动机构的运动图像,并对采集的运动图像进行处理,提取相关运动数据并分析.
在实验时,为保证实验的安全性、有效性和可靠性,需要对实验回路的充电电流、电压以及断路器故障电压等参数进行实时监控和控制,并保证实验中电流、电压等条件应与断路器在实际工作中的条件相匹配.因此,需要在实验前的准备工作中调试控制系统,并对实验环境进行安全检查.系统调试完毕且符合安全标准后方可进行图像采集,图像采集具体步骤如下:
(1)启动DaVis控制平台并在初始化后将相机设为采集模式;
(2)设置图像采集参数(包括采集频率、采集时间等)并调整采集目标在图像中的位置;
(3)同步触发高速相机图像采集开关及操动机构分闸开关,对操动机构分闸过程进行图像采集;
(4)保存并导出采集图像,关闭相机,为下次实验做准备.
1.2.2 图像处理步骤及原理
基于LabVIEW的图像处理,其实质是通过LabVIEW操作平台中的VISION模块对图像进行处理[14-16].其主要步骤可分为初始化操作、图像导入、灰度化、二值化、边缘检测以及数据分析六步.
图像处理的第一步就是操作平台的初始化,通过初始化设置将可能影响分析精度的因素消除,并对实验所有的参数进行赋值.
第二步,将CMOS相机采集的操动机构运动图像导入Vision Builder for Automated Inspection(VBAI)模块,并对其进行初步分析,分析发现操动机构在分闸周期内出现无规律的往复运动,该现象对精确定位操动机构的实时位置产生一定影响,需要对运动图像进行进一步的处理.
第三步,在VBAI模块中对运动图像进行灰度化处理.灰度化处理可以有效减少图像的原始数据量,排除干扰,提升计算效率,其灰度化图像,见图4.

图4 灰度化图像
第四步,对灰度图进行二值化处理.灰度化可以减少原始数据提升效率,但其并不能将复制的图像简化,为进一步减少背景及其他因素对数据分析的影响,凸显出感兴趣的目标轮廓,将获得的灰度图进行二值化处理,其二值化图像见图5.
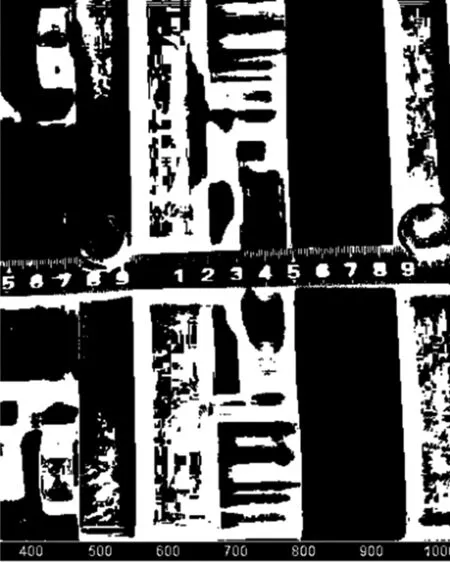
图5 二值化图像
第五步,边缘检测.图像边缘是图像的重要特征之一,边缘检测是图像处理的不可或缺的步骤,可以有效提升计算效率.本实验通过边缘检测提取标记目标的边缘,通过标记物左右边缘与固定端的实时距离来计算动触头的实时位置.边缘强度、边缘极性、搜索间距等参数的设置如下:最小边缘强度为120,边缘极性为从白到黑,算子尺寸及投影宽度分别设置为3和9.基于上述设置,对目标区域所有像素点进行检测,可以得到提取的边缘间距.
实验发现,对二值化图像直接进行边缘检测时,边缘检测效果不理想,为提高检测数据的精度,在对目标区域检测时引入边缘检测算子.根据导数阶数的不同,边缘检测算子可分为一阶算子和二阶算子,Laplace边缘检测算子为常用的二阶算子,Prewitt边缘检测算子、Sobel边缘检测算子和Robert边缘检测算子为常用的一阶算子[17-18].在对图像进行边缘检测时应考虑不同算子的适用范围,其中Sobel和Prewitt算子可以有效地增强图像沿水平和垂直方向上的灰度变化,但是其检测精度较差.Robert算子通过局部差分的方法寻找边缘,其对噪声少的图像处理效果较好,但是Robert算子提取的边缘信息不够平滑,会出现边缘信息缺失的现象.使用Laplace边缘检测算子检测到的边缘更平滑、准确,可以有效提升边缘检测的精度.图6给出了四种边缘检测算子对目标区域处理的效果图.
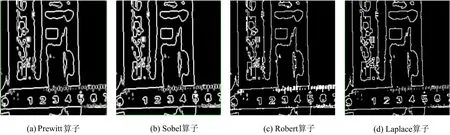
图6 边缘检测算子效果图
由图6可知,Sobel和Prewitt边缘检测算子的处理效果较差,边缘较模糊,Robert和Laplace边缘检测算子处理后目标区域的边缘更加清晰,但Robert算子在部分边缘存在边缘缺失的现象,因此本文选用Laplace边缘检测算子对序列图像进行边缘检测.Laplace算子为2阶微分算子,其卷积算子如式(1)所示.
(1)
式中:Δf1为基础Laplace算子;Δf2为精确的Laplace算子.
由式(1)可知,Laplace算子公式中各项系数之和为0,其中心系数为正数,相邻系数为非正数.因此,该算子具有更强的边缘检测及定位能力,在进行图像边缘检测时可以获得更准确、锐化效果更好的边缘.
2 数据处理及结果分析
断路器分闸速度检测的基本原理是:对序列图像中目标点的位移进行计算,并通过尺寸标定的算法将图像位移转化为实际位移.在开关分断之前,标定初始阶段操动机构斥力盘位置,在分闸过程中通过高速相机对斥力盘的运动状态图像进行高精度采集.并利用边缘检测算子对序列图像中斥力盘的位置实时追踪,由于高速相机采集时间间隔很短,故用帧间平均速度代替触头瞬时速度,即:v=Δs/Δt.其中Δs为相邻两帧图片中斥力盘的实际位移,Δt为相邻两帧图片间的时间间隔.
计算相邻帧图像对应点坐标的差值,并对所有差值取均值,即可得到斥力盘的帧间位移N,其单位为像素,通过式(2)可将像素单位与毫米单位进行转化,得到斥力盘的实际位移.
(2)
式中:Δs是实际位移,mm,D为斥力盘直径,mm,N'为斥力盘像素个数.本实验通过检测斥力盘图像两侧边缘位置计算其实际位移.
根据上述分析方法对一个分闸周期中采集的100帧图像进行分析,分析发现,由于帧间时间间隔存在一定误差,计算速度时,其速度曲线拟合误差较大,经实验验证,每隔5帧图像计算一次斥力盘位移,计算得到的分闸速度更接近真实的速度曲线.为充分了解电压对操动机构运动速度的影响,本实验分别对A,B,C,D四种不同电压下操动机构的运动特性进行研究(其中,B=2A,C=2.36A,D=2.7A),运动特性分析数据曲线见图7.
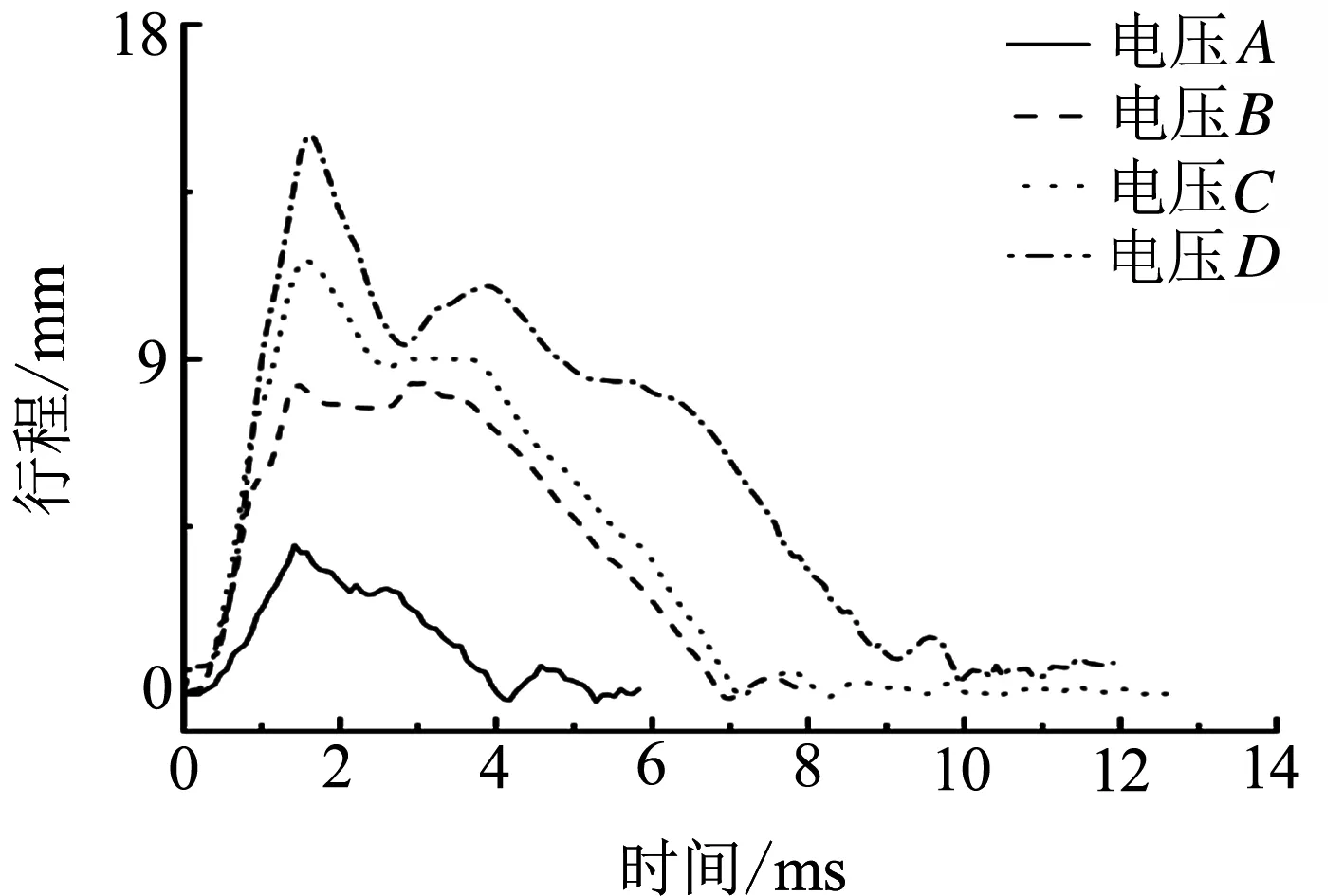
(a) 行程曲线
由图7可知,操动机构斥力盘在分闸阶段的运动是一个非线性的运动,即操动机构的分闸运动是一个非线性的运动.分闸期间斥力盘的运动大体可视为往复运动,斥力盘在2 ms内速度不断提高并在达到峰值后极速下降,即斥力盘在达到最大位移后便进行逐渐复位,在复位阶段,斥力盘出现明显的振荡现象,其复位速度出现多次波动.
由图7和表1分析可知,操动机构工作电压大小对斥力盘的运动特征存在明显影响.工作电压为A时,斥力盘运动速度在1 ms内由零升至速度峰值v,并在0.5 ms内降至0点,该过程中斥力盘的最大行程为s,并未与缓冲装置产生接触,随后斥力盘进入复位阶段.出现该现象的原因是工作电压为A时,斥力盘的驱动力较小,不会与缓冲垫产生机械碰撞,在达到最大行程后,斥力盘在油压的作用下回复原位.工作电压为B时,其最大速度与行程分别为2.79v,2.09s;工作电压为C时,其最大速度与行程分别为3.06v,3.45s;工作电压为D时,斥力盘的最大速度为4.42v,最大行程为3.75s.在达到最大行程后,斥力盘行程出现小规模的往复现象,出现该现象的原因是斥力盘在于缓冲装置发生碰撞后,斥力盘继续运动至驱动力小于缓冲装置反作用力后回弹,并在与缓冲装置分离后由驱动力再次驱动至缓冲装置接触的状态.
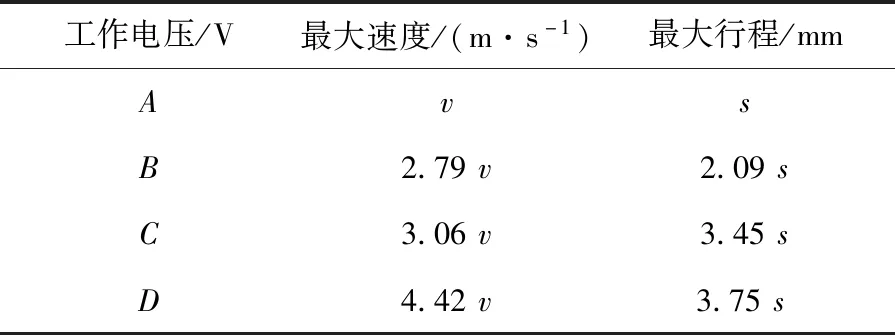
表1 不同工作电压下的运动数据
综上可知,操动机构在分闸阶段的运动状态为非线性运动,其工作电压的大小对斥力盘的运动状态有明显影响,工作电压越高,则斥力盘受到的驱动力越大,其速度变化越剧烈.
3 结论
本文针对操动机构运动速度检测问题,提出了一种基于LabVIEW图像处理技术获取速度曲线的方法,并对其进行分析,得到以下结论:
(1)本文提出的测速方法可以精确地对操动机构运动图像进行处理,得到斥力盘的实时位置信息,为分析断路器分闸速度提供技术支持.
(2)液压操动机构在分闸过程的运动是非线性的,在驱动力、油压以及自身振颤的影响下,其运动速度会出现一定波动.
(3)液压操动机构的工作电压大小与斥力盘的运动速度、运动行程呈正相关.
(4)该方法可以实现瞬时响应,在操动机构运动状态波动时可以及时采集相关数据,并对其运动状态进行实时分析.
猜你喜欢
电器与能效管理技术(2024年9期)2024-10-17 00:00:00
数学物理学报(2021年2期)2021-06-09 08:54:26
设备管理与维修(2020年23期)2021-01-04 00:15:14
应用数学(2020年2期)2020-06-24 06:02:44
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
电子制作(2018年18期)2018-11-14 01:48:20
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
数学物理学报(2016年3期)2016-12-01 05:36:27
电子制作(2016年11期)2016-11-07 08:43:37
