
基于功率跟随策略的混合动力机器人能量控制研究与仿真
2022-12-13 10:55顾琪王敏
机电信息 2022年23期
顾 琪 王 敏
(1.盐城工业职业技术学院智能制造学院,江苏 盐城 224005;2.国网上海市北供电公司,上海 200040)
0 引言
燃料电池和锂电池的混合动力机器人可以在低排放和低噪声的前提下,实现机器人长时间、无线缆灵活作业。但是燃料电池输出特性较软,且无法通过控制策略来完全改进这一缺点,因此,国内外很多学者对混合动力系统进行了研究,以改善单一燃料电池能源存在的不足。金振华等人[1]利用动态规划算法对混合动力系统城市公交车运行工况进行了全局优化计算,设计了实时控制策略,并通过仿真实验证明了该全局优化控制策略提高了系统的燃料经济性。李礼夫等人[2]建立了混联式混合动力电动汽车动力系统能量管理策略瞬时优化控制器,对运行着的发动机、电动机和发电机功率进行了基于能量利用率的瞬时优化仿真分配,提高了系统的能量利用率。王旭峰[3]提出了基于模糊逻辑的能量管理控制策略,以负载需求功率和蓄电池的SOC为输入信号,DC/DC变换器的参考输出功率为输出信号,并利用粒子群优化算法优化所提模糊逻辑能量管理策略,进一步提高了混合动力机车的动态性和经济性。张炳力等人[4]利用小波变换可以提取时域和频域信号信息,并按一定原则进行分解的瞬态信号分析特性,将离散需求功率信号进行分解,按照需求功率的变化频率对燃料电池和辅助能源进行能量分配,既满足了负载的功率需求,又避免了高频功率对燃料电池的冲击。
基于燃料电池和锂电池的混合动力机器人控制策略研究中,需对机器人启动、加速、匀速、减速制动等不同运行状态下的功率和动态需求进行分析,从而实现合理控制、分配燃料电池和蓄电池的功率输出。
1 能量管理策略的目标
在燃料电池机器人系统中,以清洁无污染的燃料电池为主要能源,锂电池作为辅助能源。但是,燃料电池与锂电池组成的混合动力机器人系统中,机器人不同的运行状态对应着不同的能量流动方向,因此,首先要确定系统的能量管理策略总体目标,具体包括:
(1)满足机器人的功率需求。机器人在不同运行状态时,对能源系统的要求不同,在启动阶段,速度突然增加,需要可以快速放电的能源,即刻满足机器人负载的能源需求;在速度较高的运行阶段,需要混合动力共同满足负载需求,此时就需要辅助能源增加输出功率,满足负载需求功率,保证燃料电池工作在合理的运行范围。
(2)在满足机器人需求功率的前提下,保持燃料电池安全高效运行,燃料电池的输出功率不能超过允许的最大值,即Pfc<Pfcmax。利用配备的辅助能源,在负载需求功率突变和波动较大时,辅助能源能快速放电,满足负荷功率需求。
(3)保证辅助能源锂电池处在合理的充放电区间,即SOCbat在[SOCmin,SOCmax]区间。过度充电和过度放电都会损害锂电池,进而影响锂电池的充放电效果,缩短使用寿命。
(4)辅助能源锂电池的电荷状态值较低,机器人制动时,可以吸收燃料电池释放的能量及电机制动回馈的能量。
2 典型运行状态下的能量流向
混合动力电池机器人运行状态不同,其能量分配和流动方向也就不同,图1为混合动力系统能量利用示意图。

图1 混合动力系统能量利用示意图
(1)在机器人起步加速阶段,由于燃料电池响应速度较慢,此时主要由辅助能源锂电池向负载提供能量,燃料电池缓慢启动,两种能源共同向负载提供能量。能量流动方向依次如图2(a)(b)所示。
(2)在机器人匀速行驶阶段,此时能量流动有3种情况,分别是:
1)当负载需求功率低于燃料电池的最佳输出功率,并且辅助能源锂电池的SOC低于运行允许的最小值时,那么由燃料电池向机器人负载提供能量,同时向锂电池充电,如图2(c)所示;
2)当负载需求功率低于燃料电池的最佳输出功率,并且锂电池的SOC处在允许运行的范围内时,燃料电池仅向机器人负载提供能量,如图2(d)所示;
3)当负载需求功率大于燃料电池的最大输出功率时,燃料电池和锂电池共同向机器人负载提供能量,能量流动方向和机器人启动后期相同,如图2(b)所示。
(3)在机器人负载突增时,燃料电池和辅助能源锂电池共同向机器人负载提供能量,能量流动方向如图2(b)所示。
(4)在机器人制动减速时,燃料电池停止工作,燃料电池不能吸收能量,所以机器人电机反转产生的制动能量只能向锂电池充电,能量流动方向如图2(e)所示。

图2 机器人各阶段能量流向
3 基于功率跟随的能量管理策略
在功率跟随式控制策略中,燃料电池的工作状态由机器人的负载需求功率与蓄电池的荷电状态SOC两方面决定。事先设定蓄电池SOC的上下范围限定值,保证蓄电池的SOC处在这个范围内,燃料电池首先要满足负载需求功率,在此前提下,根据蓄电池SOC值决定是否对蓄电池充电。然而,燃料电池开关的频繁切换将破坏电堆的正常运行,从而降低燃料电池的性能,缩短其使用寿命。因此,在功率跟随式控制策略中,研究最小输出功率以避免燃料电池频繁开关显得十分重要。
设定燃料电池的最大输出功率,避免出现因为燃料电池输出电流过大和电压下降造成的电堆损坏现象。传统功率跟随式控制将燃料电池的运行状态分为run和stand两种[5],如图3所示。

图3 燃料电池工作状态变换图
燃料电池功率的计算与负载电机需求功率、锂电池的SOC值以及燃料电池自身的条件限制其输出功率的上限值等3个因素有关。
燃料电池输出功率的计算,首先要满足机器人负载的需求功率,即:

式中:Pfcbyload为燃料电池输出负载功率;Pload为负载需求功率。
其次,要根据锂电池的SOC值修正燃料电池的输出功率,使锂电池的SOC值保持在理想的SOC*。基于SOC值修正的燃料电池增发功率由式(2)计算得到:

式中:SOC*=0.5(SOCmax+SOCmin);ΔSOC=0.5(SOCmax-SOCmin);Pfc-chg为燃料电池充电功率。
当SOC值低于理想值SOC*时,燃料电池增发功率,给锂电池充电;当SOC值高于理想值SOC*时,燃料电池减发功率,锂电池放电。这两种运行状态都是使锂电池的SOC值向理想SOC*靠近。
燃料电池自身的条件限制其输出功率,则是通过限制燃料电池的输出功率防止其输出电流过大,引起电压大幅下降,对电堆造成破坏,可以对燃料电池起到保护作用。
最小输出功率跟随式能量管理策略Simulink模型如图4所示。
4 仿真结果及分析
通过如图4所示功率跟随式能量管理策略的Matlab/Simulink仿真模型,仿真验证采用的基于最小功率的燃料电池混合动力系统能量管理策略。为验证功率跟随策略在燃料电池和锂电池混动机器人能量控制中的有效性[5-6],设置锂电池SOC初始值在60%,通过仿真实验,分别研究了负载需求功率、燃料电池输出功率、锂电池输出功率以及锂电池SOC值的变化级对应关系,如图5所示。

图4 最小输出功率跟随式能量管理策略Simulink模型
从图5可以看出,机器人在启动阶段,由于负载需要,锂电池进行快速放电,输出功率。燃料电池启动后,由于负载需求功率在燃料电池允许放电范围内,所以燃料电池独立供电;当t=2 s时,负载需求功率增大,单靠燃料电池供电无法满足负载功率需求,此时锂电池开始与燃料电池一起为负载供电,锂电池的SOC迅速下降;当t=6 s时,负载所需功率降低到燃料电池设定的最小功率以下,此时锂电池的SOC略低于理想的SOC值,根据最小功率跟随控制策略,当锂电池的SOC在[0.4,0.8]范围内时,燃料电池保持上一时刻的工作状态。因此,t=6 s后,燃料电池工作在最小输出功率状态,既满足负载功率需求,又为锂电池缓慢充电,避免了燃料电池的频繁充放电。
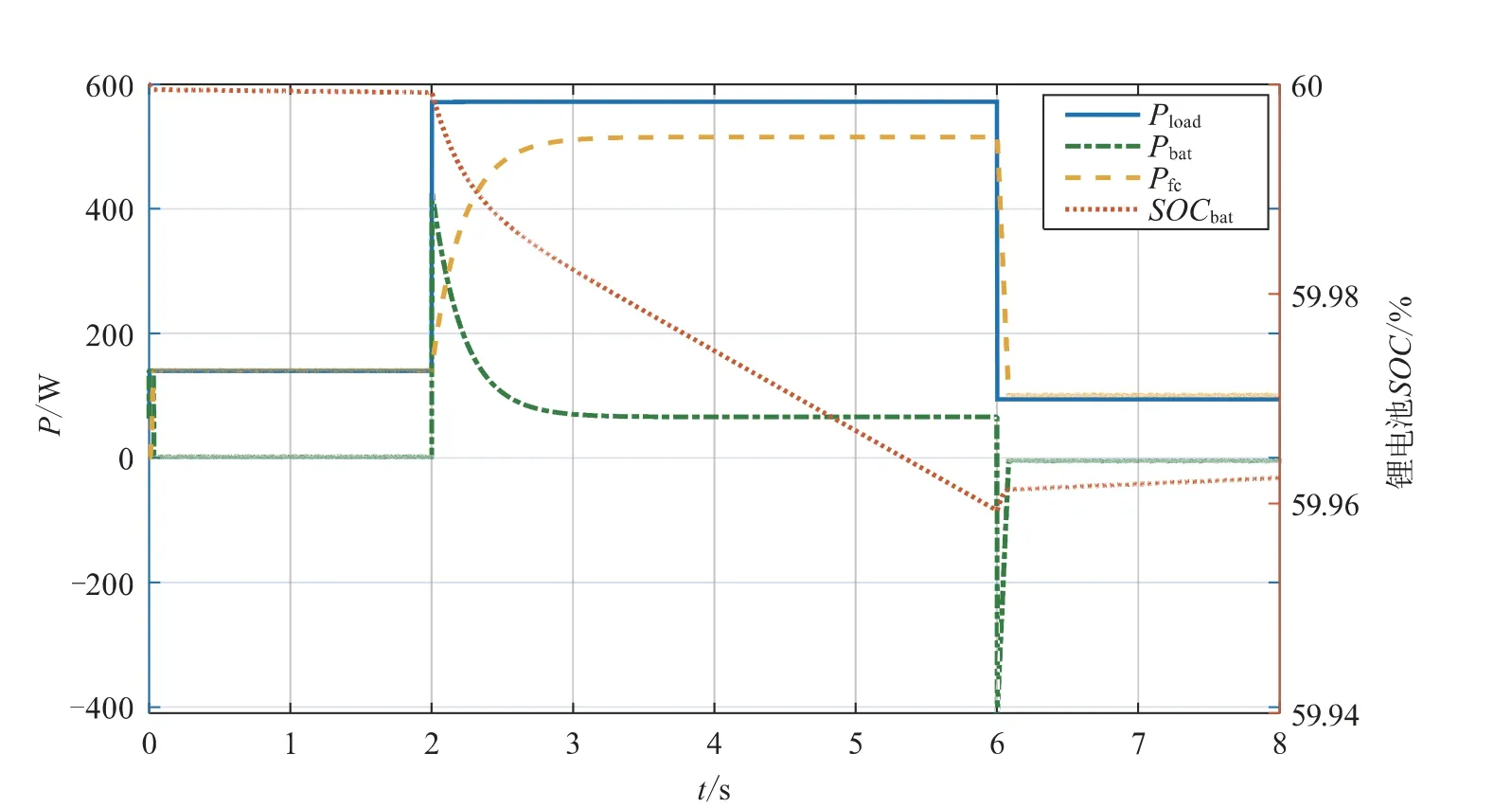
图5 SOC=60%时混合动力系统功率分配图及锂电池SOC变化曲线图
5 结论
基于以上仿真实验及结果分析,可以得出以下结论:基于最小功率跟随的能量管控策略,实现了满足负载功率需求、燃料电池和锂电池双高效利用三个目标,提高了混合动力系统的经济性。
猜你喜欢
太阳能(2022年2期)2022-03-07
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
电子制作(2018年23期)2018-12-26
车迷(2017年12期)2018-01-18
电子制作(2017年10期)2017-04-18
科技知识动漫(2017年4期)2017-04-15
科技视界(2016年18期)2016-11-03
百科探秘·航空航天(2015年3期)2015-12-01
汽车与新动力(2014年4期)2014-02-27
储能科学与技术(2014年5期)2014-02-27
