
基于激光SLAM 的综采工作面实时三维建图方法
2022-12-07 17:24:06亓玉浩关士远
工矿自动化 2022年11期
亓玉浩,关士远
(1. 山东能源集团有限公司,山东 济南 250013;2. 北京天玛智控科技股份有限公司,北京 101399)
0 引言
“十三五”以来,国家发展改革委、国家能源局等部门相继印发《能源技术革命创新行动计划(2016-2030 年)》《关于加快煤矿智能化发展的指导意见》,大力推进煤矿智能化建设。对综采工作面进行智能感知,实时构建工作面三维地图,进而实现采煤机自主作业,是煤矿智能化发展的关键一环[1-2]。
煤矿三维地图的构建方法主要包括站点式建图[3]和移动式建图[4]。站点式建图方法先将整个区域划分成多个子区域,然后逐站扫描获取激光点云,同时用全站仪测量各个站点的坐标,最后结合激光点云和站点坐标进行整个区域的点云拼接。该方法所需时间较长,实效性较差,不能满足综采工作面实时建图需求。移动式建图方法主要采用激光雷达进行实时扫描,利用惯导和里程计计算位姿,实现激光点云实时拼接[5-6],进而实现实时建图。该方法依赖高精度的光纤惯导和里程计进行位姿计算,而在实际工程实践中里程计精度难以满足应用需求,导致获取的工作面三维激光点云不完整,从而难以获取完整、准确的工作面三维地图。
同时定位与地图构建(Simultaneous Localization And Mapping,SLAM)[7-10]是实时移动建图技术研究热点,通过搭载特定的传感器主体,在没有环境先验信息的情况下,在运动过程中建立环境模型,同时估计传感器位姿,如果传感器采用激光雷达,即为激光SLAM。本文提出一种基于激光SLAM 的综采工作面实时三维建图方法。实时获取综采工作面激光点云后,采用惯导的姿态角对激光点云进行去畸变处理,采用主成分分析法[11-13]提取激光点云的几何张量特征,通过计算特征点距离进行点云匹配和位姿估计,最后对姿态进行优化,并增量式构建全工作面三维激光点云。
1 综采工作面实时三维建图方法原理
综采工作面三维激光扫描硬件主要包括2 个16 线激光雷达、惯导、车载工控机,部署在工作面巡检机器人上,如图1 所示。2 个16 线激光雷达旋转轴呈45°安装,负责激光扫描;惯导安装于水平激光雷达底部,测量值用于去畸变处理及为后期优化提供初始值;车载工控机运行激光SLAM 程序,实现实时建图。

图 1 综采工作面三维激光扫描硬件Fig. 1 Hardware for three dimensional laser scanning in fully mechanized working face
1.1 激光扫描原理
16 线激光雷达采用飞行时间测量法,激光发射器发出一束超短激光脉冲,激光投射到物体上并反射,激光接收器接收反射光,通过测量激光束在空中的飞行时间,可以准确计算目标物体与激光雷达的距离。16 线激光雷达有16 个激光发射器和16 个激光接收器,各发射器垂直方向均匀分布,垂直分辨率为2°,水平分辨率为0.2°,如图2 所示,其中红色点为测量原点,黄色点为激光发射器,右侧和下方数据为雷达结构尺寸。

图 2 激光雷达线束分布Fig. 2 Lidar harness distribution
激光雷达工作时,机械旋转部分以10 r/s 的速度高速旋转,各激光发射器和接收器每隔0.2°完成1 次发射和接收,16 线激光雷达每秒完成约30 万次测量。每次测量结果为目标物体上某点的坐标、反射强度、时间戳、激光器ID,指定时间内所有的测量结果称为点云。
激光雷达数据通过以太网UDP(User Datagram Protocol)传输,通常1 次传输1 s 或0.1 s 内的测量数据,用帧表示,则对应的帧率分别为1 Hz 和10 Hz。帧率的选择与移动建图的速度有关,若移动速度慢,可以降低帧率;若移动速度快,则需要提高帧率。由于激光雷达是移动的,帧内第1 个测量点与最后1 个测量点所在的坐标系不一致,会产生畸变。通过提高帧率能有效抑制畸变,但不能消除畸变,本文采用惯导测量值消除畸变。
1.2 激光SLAM 原理
激光雷达获取的环境坐标基于移动的激光雷达坐标系,而要构建的实时地图基于固定的世界坐标系,因此,需要估计出激光雷达坐标系相对于世界坐标系的实时姿态,将测量值变换到世界坐标系,实现实时移动建图。建图和位姿估计可能是互相耦合的,建图依赖位姿估计结果,位姿估计一般根据已建地图进行。激光SLAM 主要解决以下问题:① 通过实时读取的点云数据和已经建立的三维地图估计某时刻的位姿。② 通过该时刻的位姿建立基于世界坐标系的三维地图,即实现定位及建图。
2 综采工作面实时三维建图方法实现
基于激光SLAM 的综采工作面实时三维建图方法主要包括激光点云去畸变、点云特征提取、位姿估计、优化建图等步骤。
2.1 激光点云去畸变
在去畸变处理前,假设已将点云和惯导数据变换到同一坐标系,故惯导坐标系和激光雷达坐标系重合。实际测试采用16 线激光雷达,在运动中执行扫描任务会产生运动畸变。雷达本身的姿态因载体运动而变化,而激光雷达计算周围障碍物距离时是基于激光雷达坐标系的,如果不考虑激光雷达本身的姿态改变,就会产生误差。该类误差可以通过惯导数据进行补偿。根据点云中每个点的时间戳检索对应的惯导数据,获得对应每个点的姿态角。如果没有检索到对应姿态角,则采用四元数法插补,用对应时间戳前后2 个惯导数据进行插补,从而获得对应的姿态角。将所有点云都变换到该次扫描初始时刻的坐标系,一次扫描得到雷达从0°旋转到360°所获得的全部点云,即1 帧点云。变换矩阵可通过惯导初始时刻的姿态角和当前时刻的姿态角求得。
2.2 点云特征提取
综采工作面具有空间狭窄、环境特征重复、振动大等特点,从激光点云中获取的特征点数少,误匹配概率较高,若采用简单几何特征实现三维建图,效果不佳[14-15]。本文采用主成分分析法提取几何张量特征,先求点集的协方差矩阵,再进行特征值分解,得到几何张量特征[16-17]。求得特征后,再融合惯导数据,通过非线性优化求得雷达姿态,最后进行后端优化建图。
在点云中,以每个点为球心、r为半径作球,r与所建地图的空间大小有关,对于综采工作面,一般设为0.1~0.3 m。设点云中第i(1 ≤i≤N,N为点云内所有点的个数)个点的坐标为(xi,yi,zi),计算点云P中所有样本的协方差矩阵:
式中:E(·)为期望函数;为点云中所有点对应坐标的算术平均值。
计算协方差矩阵的所有特征值及特征向量,进行特征值分解,得

式中:V为特征向量组成的变换矩阵;λ1,λ2,λ3为特征值。
3 个特征值间接表征了区域的曲率特征,当λ1> > λ2时,该区域为直线结构;当 λ1≈λ2> > λ3时,该区域为平面结构;当 λ1≈λ2≈λ3时,该区域是椭球结构。设L,F,S分别为直线特征、平面特征、椭球特征参数,其计算公式为

针对3 个特征参数分别设置阈值,当所求特征参数大于相应阈值时,将其归类为对应特征。阈值需要根据具体环境选择,对于综采工作面,直线、平面、椭球特征参数可分别设置为0.65,0.33,0.71。整个点云按照3 个特征参数进行分类,结果以KDTree结构存储。
2.3 位姿估计
设当前时刻k+1 获得的点云为Pk+1,点云内的点为pk+1,i,前一时刻k对应的点云为Pk,点云内的点为pk,i,使用最近邻算法搜索Pk+1与Pk中对应的特征点,进行数据关联。前一时刻的姿态是已知的,通过前后2 帧之间的变换矩阵T,可得到当前时刻的姿态,从而将姿态估计问题转换为变换矩阵求解问题。变换矩阵可表示为

式中:R为旋转矩阵;t为平移矩阵。
计算2 帧中3 类特征点之间的距离。对于直线特征点,采用点到线的距离,在Pk中使用最近邻算法搜 索 与 点pk+1,i最 近 的2 个 点,设 为pk,i1,pk,i2,将 这2 个点的连线作为目标直线;对于平面特征点,采用点到面的距离,在Pk中使用最近邻算法搜索与点pk+1,i最近的3 个点,设为pk,i3,pk,i4,pk,i5,将这3 个点所在平面作为目标平面;对于椭球特征点,采用点pk+1,i到最近点pk,i6的距离。距离计算公式为
式中:dL为点到直线的距离;dF为点到平面的距离;dS为点到点的距离。
构建目标函数[18-19]:

式中:R*,t*分别为旋转矩阵、平移矩阵目标值;ωa,ωb,ωc为3 种距离的对应权重;A,B,C分别为直线特征点、平面特征点、椭球特征点个数。
为了避免偏差过大,即出现所谓的离群点,采用Huber 鲁棒核函数处理残差[20],得
式中:dδ为对距离进行残差处理后的值;d为距离,d∈{dL,dF,dS};δ为阈值,本文取0.3 m。
因为R是正交矩阵,无法直接对R求导,求得最优解。将T变换到其对应的切空间,在局部的李代数[21]结构下对R求导,再采用Levenberg-Marquardt算法求解目标函数。
求得当前时刻的姿态后,要判断该帧是否作为关键帧保留,并进行后续优化建图。若当前帧姿态相对于前一帧姿态的平移超过0.5 m,或3 个轴中任意一轴相对于前一帧对应轴的旋转角大于1°,则可判断为关键帧。
2.4 优化建图
得到关键帧后,要与历史关键帧进行联合优化,以进一步减小姿态估计误差。如果将所有的关键帧一起进行优化,随着巡检机器人运行距离增加,优化变量将变得非常多。因此,本文采用滑动窗口法[22]选取邻近的10 个历史关键帧,与当前关键帧一起进行联合优化。构建姿态图[23],其节点为关键帧的姿态及该帧点云姿态,边为前后帧之间的姿态约束。所有姿态图的节点存储在KDTree 内,便于后续遍历操作。
为保证实时性,采用增量式优化算法,使用GTSAM[11]优化库实现联合优化。联合优化部分为独立进程,优化频率为10 Hz。同时,在历史关键帧中进行匹配,如果历史关键帧与当前关键帧的对应特征点较多,即为回环,将该历史关键帧及其前后各5 帧加入目标函数进行联合优化,即共计21 帧同时进行优化。回环部分为独立进程,优化频率为5 Hz。将获得的所有关键帧点云叠加到一起,即为全局实时三维地图。
3 井下工业性试验
在兖矿能源集团股份有限公司某工作面进行试验,该工作面采高为4.5 m,长度为260 m。将激光雷达安装在轨道式巡检机器人上,现场建图数据及指令通过WiFi 传输,如图3 所示。

图 3 轨道式巡检机器人Fig. 3 Orbital inspection robot
3.1 SLAM 建图效果
远程遥控巡检机器人从刮板输送机的机头运行到机尾,进行实时建图,结果如图4 所示。图4(a)中,红色为综采工作面三维激光点云,青色线为巡检机器人实时轨迹,从图4(b)可清晰看出采煤机轮廓。
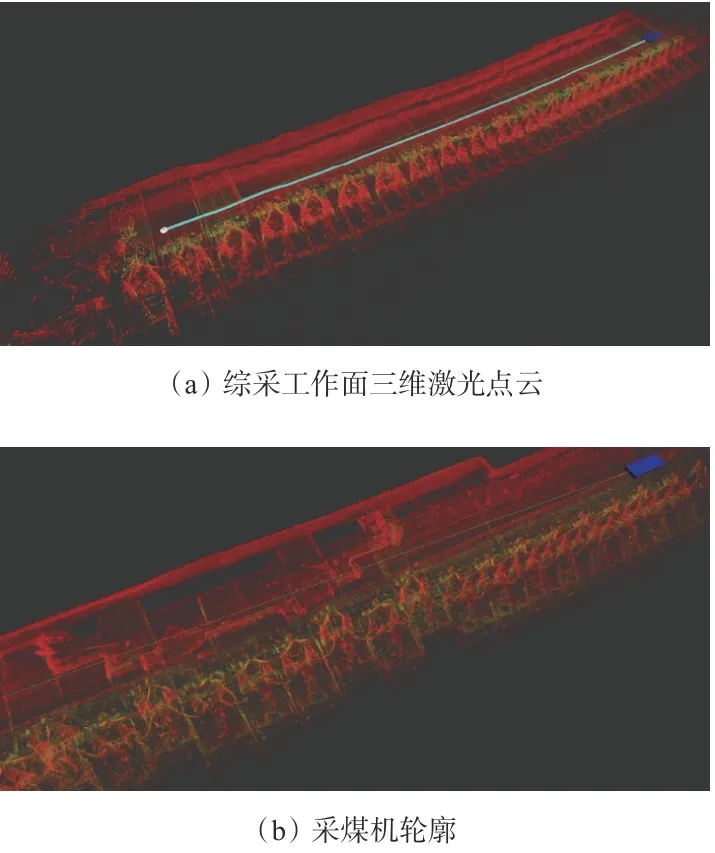
图 4 综采工作面实时三维重建效果Fig. 4 Real time 3D reconstruction effect of fully mechanized working face
3.2 误差分析
在支架上选8 个标记点,用全站仪测出这些点相对于地图原点的坐标,作为实测值。由于实时SLAM 所生成的点云稠密程度不够,采用在线录制的3 个数据包生成稠密点云,在点云中识别这些标记点,并计算绝对误差均值:
式中:n为标记点个数;为 标记点坐标测量值;Xj为标记点坐标实测值。
激光点云标记点坐标测量误差分析结果见表1。可看出3 组数据中最大绝对误差为0.19 m,满足综采工作面监控及刮板输送机找直精度需求。

表 1 激光点云标记点坐标测量误差分析结果Table 1 The error analysis result of marked points coordinate of laser point cloud m
4 结论
(1) 提出了基于激光SLAM 的综采工作面实时三维建图方法,给出了激光点云去畸变、点云特征提取、位姿估计、优化建图等关键步骤。通过井下工业性试验进行定性及定量分析,结果表明,该方法能实时、完整、高精度地构建全工作面范围的三维地图,最大绝对误差均值为0.19 m,满足综采工作面监控及刮板输送机找直精度需求。
(2) 该方法也存在一些不足,如没有考虑振动对三维建图设备的影响,因为井下日常生产造成的振动较大,而激光雷达带有旋转部件,随着使用时间增加,激光雷达精度会降低。此外,对于实时产生的激光点云,没有生成三角网等便于渲染的数据格式,未来需要对实时三维点云数据进行网格化处理,进一步改善其显示效果。
猜你喜欢
汽车工程师(2021年12期)2022-01-17 02:29:56
电子制作(2019年10期)2019-06-17 11:45:06
成都信息工程大学学报(2018年4期)2019-01-23 06:57:18
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
大连理工大学学报(2017年4期)2017-08-07 07:03:20
自动化学报(2017年4期)2017-06-15 20:28:55
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
重庆交通大学学报(自然科学版)(2016年1期)2016-05-25 00:37:00
西北工业大学学报(2015年3期)2015-12-14 13:08:46
