可见光通信的自动导航系统设计*
2022-12-07 03:29王加安杨鸿基刘疏影
电讯技术 2022年11期
王加安,杨鸿基,刘疏影
(常州工学院 光电工程学院,江苏 常州213032)
0 引 言
近年来,基于照明的可见光通信技术在室内定位技术应用领域取得了重要成果,如何提高可见光通信的定位精度已成为众多专家学者主要的研究方向[1-4]。
为了提高可见光定位的精度,国内外学者已经进行了相关研究。许毅钦等人[5]采用人工神经网络空间距离预测算法设计了室内基于可见光通信的定位系统,通过测量每个LED的信号强度来确定接收器在三维空间的坐标。李斗鹏[6]建立了基于PD传感器的室内可见光定位系统中LED信号的空间传输模型,主要针对LED安装平面与PD接收平面平行的场景,即LED的辐射角φ与光电接收器的入射角ψ相等的情形。这种方式的室内定位系统需要高帧率的摄像头,成本高并且需要处理的数据量较大,LED中的R、G、B三色配比,会影响正常的停车场照明装置。于颖等人[7]设计的地下车库路径导航系统中,需要将车库的物理外观抽象为平面模型,运用蚁群算法对导航路径进行计算,得到的路径规划信息通过MSP430单片机产生不同频率的方波信号,这样一来,接收机处的前置放大电路作为光信号恢复的关键部分,直接影响到接收机的灵敏度,也会影响信号的传输质量。
综上所述,在基于可见光通信的定位系统研究中,LED信号的驱动以及其他各种环境因素的干扰对于定位精度的影响较大[8-9]。针对这些问题,本文对基于可见光通信的定位系统进行了改进,对干扰因素提出了解决方案,提升了整个系统的工作效率,并大幅减小了环境对光源的影响,实现了精准定位。
1 室内可见光通信基本信道模型
在无线光通信的研究中信道主要分成直射路径的视距链路(Line of Sight,LOS)与非直射路径的视距链路(Non-line of Sight,NLOS)两类,室内可见光通信信道也主要分成这两类[10]。其中,LOS 信道如图1(a)所示,接收到的能量占主要部分,但其易受到障碍物的遮挡从而阻断信号的传输;NLOS 信道如图1(b)所示,通信系统不易受物体的阴影效应的影响,信号经过墙面或物体表面的漫反射到达接收模块,降低收发两端的指向要求,缺点是存在多径效应,干扰通信质量,同时对信号的传输速率有限制。
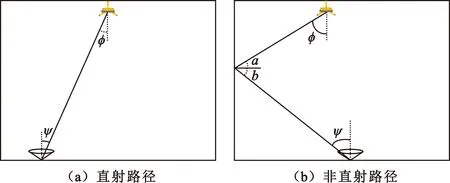
图1 视距链路图
综合考虑本系统的使用场景为停车场自动导航,信道以直射链路为主,主要对直射链路的信道增益及接收光功率进行分析。由于LOS信道受多径效应的影响比较小,信道链路可看成是线性衰减和延迟的。假设传输距离为d,接收端光电检测器的感光面积为Ar,由于LED属于朗伯辐射模型,当d>>Ar时,光电检测器接收到的光功率可看成是一个常数。在一个光链路中,直射增益可以表示为
(1)
(2)
式中:n表示折射指数。假设发射光功率为Pt,则经过LOS信道传输,接收到的光功率可以表示为
Pr-los=Hlos(0)·Pt。
(3)
2 系统总体设计
基于可见光通信的自动导航系统主要包含4个模块,分别是导航位置监测模块、可见光信号调制解调模块、位置语音播放模块以及定位导航模块。导航位置监测模块获得各点的位置信息,并将位置信息发送至可见光信号调制模块,将电信号转化为光信号后经由LED发出;可见光信号解调模块采集拍摄图像,通过数据分析对所采集到的图片信息进行信号转化、数据处理与计算,将计算得到的位置坐标显示到显示屏上,确定被测点的位置坐标,定位导航模块根据最优规划路径进行自动导航。本文采用脉冲宽度调制(Pulse Width Modulation,PWM)调制方法,通过电源驱动LED,发送音频信号,语音播报坐标信息,从而实现自动导航的功能。系统的整体结构如图2所示。

图2 系统整体框图
2.1 导航位置监测模块
2.1.1 基于光信号强度的检测方法
基于光信号强度检测的可见光定位方法是对检测到的光信号强度进行分析,从而获取更加精确的定位坐标。该方法一般利用强度调制和直接检测手段,根据不同的载波类型,将光信号从发射端发出,从而降低固定区域内的信号干扰。这种检测方法以LED的辐射模型为基础,根据光照信号强度的不同实现距离的计算。
2.1.2 基于最小二乘法的定位坐标计算
运用光信号高频噪声检测技术进行干扰噪声处理,减少了区域内信号互相干扰。从LED的光照辐射强度分布特征可知,光信号的辐射强度可用接收器与LED光源之间距离的函数关系来表示。在检测到的定位时序中,接收器根据检测到的信号强度分别进行分析,得到不同类型的光源信号;对接收到的每个光源信号进行分析,进一步计算得到接收器的位置坐标。光源信号强度在线检测法的最重要环节就是根据每个接收器和光源之间的光线距离强度来准确获取每个接收器的光源位置,利用三角定位法进一步提高定位的精准度,降低算法的复杂性,本文通过使拟合数据和真实数据之间误差的平方和最小即最小二乘法实现。假定接收器接收到的信号源总数是M,接收端待测坐标为(x,y),Li表示待测坐标与第i个信号源之间的距离,因此有
(4)
则误差函数表达式如下:
fc=(HX-Y)T(HX-Y) 。
(5)
式中:
对误差函数求导,并使其等于0,有
2HTHX-2HTHY=0,
(6)
X=(HTH)-1HTY。
(7)
如果HTY为非奇异的,可以直接获取接收器坐标,实现定位。
2.2 可见光信号调制解调模块
2.2.1 可见光通信调制方式
可见光通信编码一般有脉冲宽度调制、开关键控调制(On-Off Keying,OOK)和脉冲调制编码(Pulse Position Modulation,PPM)三种方式,其中PWM编码是用同一种频率的方波来发送信号,用方波的占空比来区别高低电平。为了减少发射功率,本文采用高电平固定,通过改变低电平的方式来实现PWM编码,编码格式如图3所示。使用高电平脉冲宽度2 μs、低电平8 μs表示逻辑“1”;高电平脉冲宽度2 μs、低电平脉冲宽度3 μs表示逻辑“0”;高电平脉冲宽度2 μs、低电平脉冲宽度15~65 μs表示启动代码。需要注意的是,在编码过程中,高电平脉冲宽度应尽可能小,从而不影响接收器识别,以降低传输的总体功耗,便于在硬件电路上提高发射管的瞬时功耗,提高信噪比,延长通信距离。
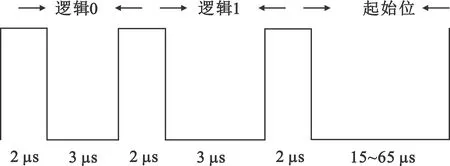
图3 PWM调制编码
2.2.2 LED驱动电路
本文设计的自动导航验证系统大小为1 m×1 m×1 m,光源选择的是聚光性好、发射功率大的3 W LED灯珠,系统采用欧司朗的SinkPAD芯片控制LED高亮,完成信号的发射,实现长距离、高信噪比的通信。LED驱动电路如图4(a)所示。
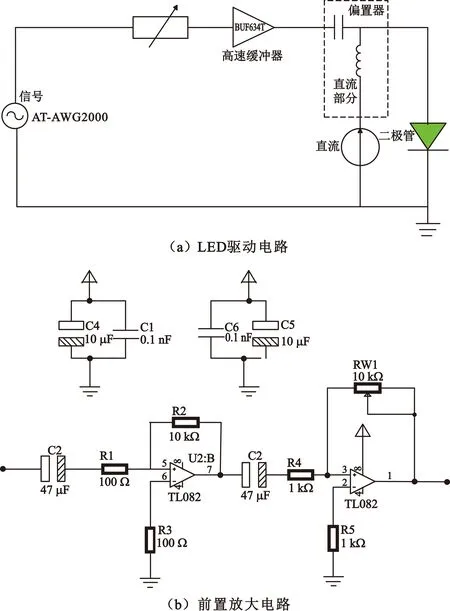
图4 发射端电路图
为了避免在对LED进行全开全关调制时系统输出出现非线性失真的情况,采用Bias-Tee ZFBT-4R2GW-FTB偏置器提供偏置电流,同时系统中加入了可提高LED驱动能力的BUF634T芯片,实现调节LED调制的作用。
2.2.3 前置放大电路
一般情况下,要传输的信号是直接输出或采集的,且信号幅度相对较小,需要进行高倍率处理。为了减少干扰信号,在信号输入端增加了大功率交流放大电路,如图4(b)所示。
2.2.4 接收电路设计
首先本系统采用运算放大芯片OPA657构建如图5(a)所示的一级放大电路。要想实现伏级的电压输出,如果仅通过一级放大电路,那么反馈电阻达到几万欧以上,如此大的反馈电阻会引起两个问题:一是白光LED的光信号是在一个直流偏置上叠加的,调制深度较小,外界的杂光干扰如日光等也增加了直流成分,因此转换后的电压信号直流成分多,信号成分微弱,且容易饱和,信号全部丢失;二是接收端带宽将急速下降,失去信号高频成分,提高了系统误码率。为了解决这一问题,本实验系统以两片OPA657芯片为核心组成二级运算放大电路,无源高通滤波器处于两级放大之间和第二级输出之后,滤除直流成分,第二级运放只放大信号的高频分量,具体电路结构如图5(b)所示。
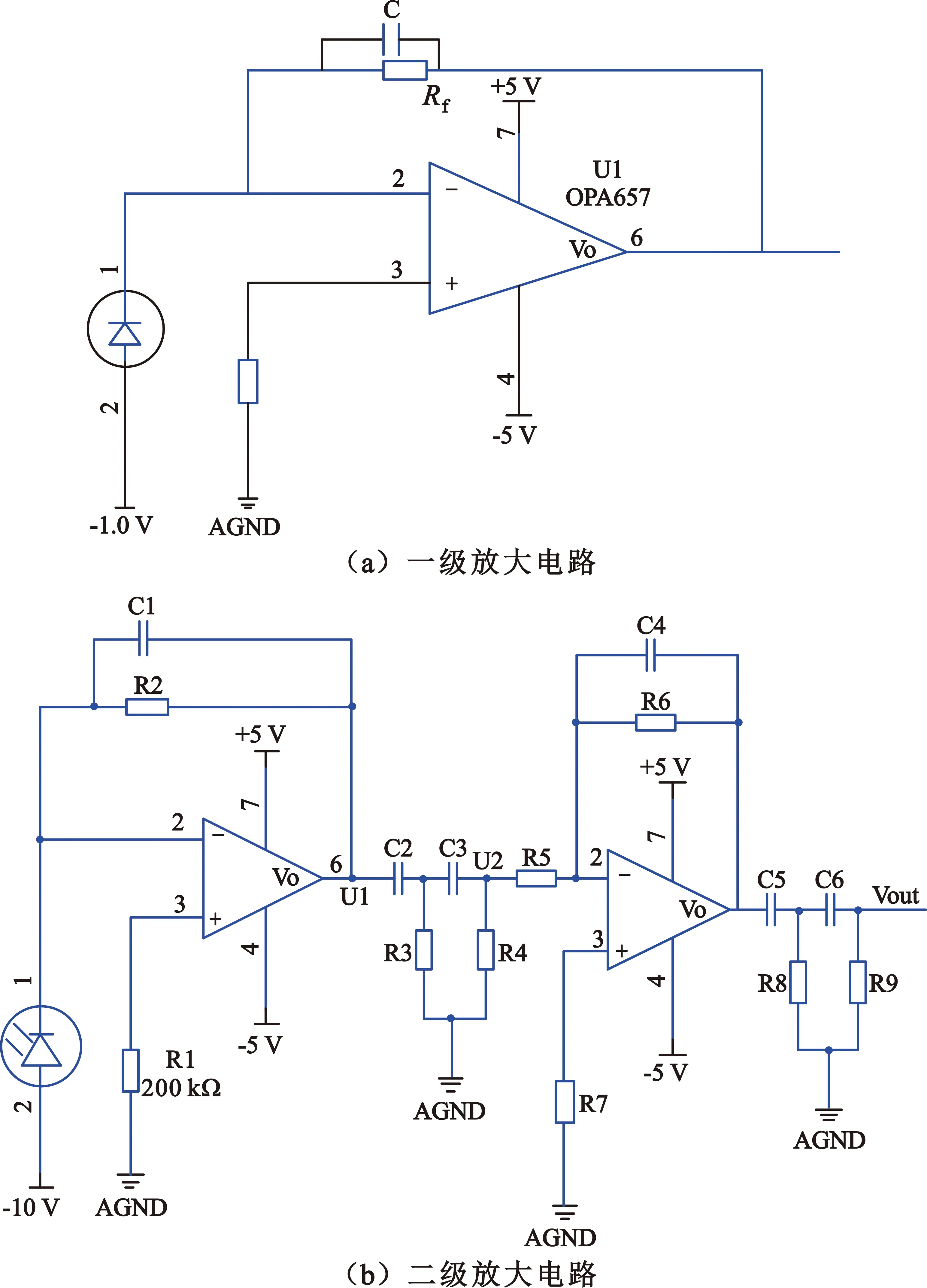
图5 放大电路
在二级放大电路中,由电容C2、C3及R3、R4组成的高通滤波网络其特性用输出电压与输入电压比值的绝对值表示:
(8)
(9)
实验中取C2=C3=1 μF,R3=R4=1 kΩ,则根据上式,f3 dB=452.27 Hz,滤除了直流和低频成分。
2.2.5 解码子程序设计
与信号的编码过程相对应,接收到的数据可以通过识别和捕获两个数据下降线路沿的时间来确定:如果这个时间为 7 μs,则被确认为数据“0”;如果持续时间是12 μs,则被确认为数据“1”;如果开始的时间是15~65 μs,则其起始位被判断为主要数据。开启定时器,测量一次即收到一位数据,识别起始位后,将逐位接收和存储下一个接收到的数据。如果在接收到起始位之后,检测到时间不在数据0或1的时间范围内,则放弃该帧接收到的数据,并且将重新存储下一帧数据的起始位。
2.3 位置语音播放模块
语音信号功率放大器的输出模块原理框图如图6所示,电路主要由音频运算放大器TAD2822组成。语音信号的功率放大输入模块电路主要包括带通滤波器和功率放大电路两部分,其中带通滤波器用于滤除D/A输出信号中的混叠频率分量,降低干扰。
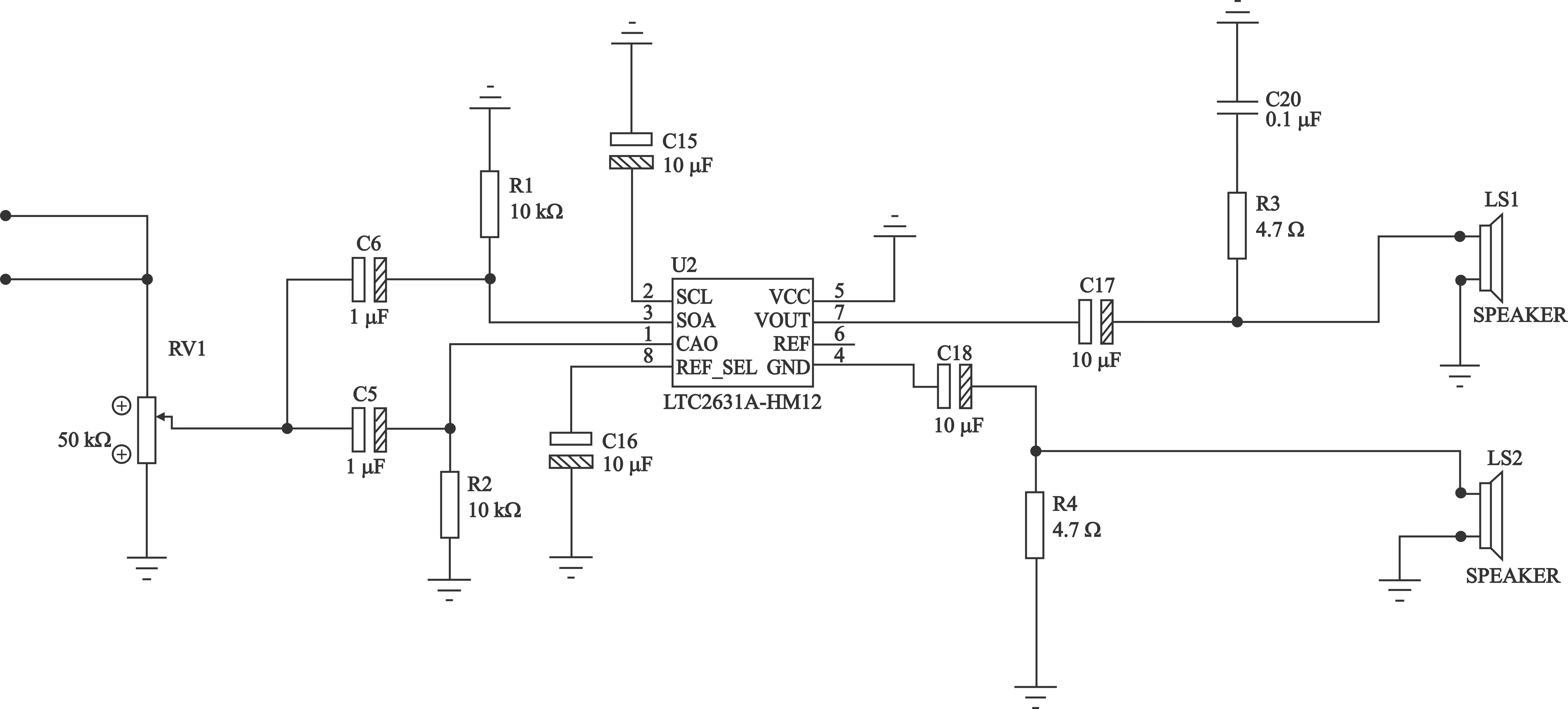
图6 语音信号功放电路图
2.4 定位导航模块
定位导航模块接收端的摄像头智能捕捉停车场LED发出的图像信息,滤除背景杂质光后,获得具体的位置信息,综合计算车辆当前所处实际位置,并在软件终端显示,实现车辆定位。在用户选择目标车位后,采用贝叶斯相位中心偏置天线(Bayesian Information Criterions Displaced Phase Center Antenna,BDPCA)聚类算法[11-12],提供当前位置到目标车位的最佳路径,实现停车场的自动导航。
2.4.1 BDPCA聚类算法
DPCA算法[13]由Alexrodriguez和Alessandrolaio在2014年首次提出,算法的核心就在于对聚类中心点的描述,算法的实现基于以下假设:类簇的中心点在周围的密度远远超过了相邻高密度点的密度。因此,DPCA算法主要有两个核心部分,即局部密度和高密度位置之间的距离。
在DPCA算法中,根据决策图进行人工筛选,凭借主观判断数据的聚类中心以及簇类别,然而主观的人工判断容易出现误判,给聚类结果带来很大的影响。本文提出将贝叶斯信息准则(Bayesian Information Criterions,BIC)与DPCA算法融合的BDPCA算法,不但考虑了各类参考因素在种群发生的概率,而且对误判所带来的定位误差,算法都具有很强的辨别能力。
在BDPCA算法中需要注意两点:一是要分类的人群参考数量和人群的类别,比如两种情况下的参考整体(正常和异常)或异型的参考整体(良好、满意、正常、不满意、非允许等);二是已知各种参考总体的概率和分布,即可得到已知每个参考总体的预验概率和各种概率密度的函数p,显然,0≤p(Di)≤1,i=l,2,…,L,∑p(Di)=1。
2.4.2 最佳路径导航
首先通过摄像头传感器对运动车辆的位置进行判断,系统获取当前停车场的空车位信息,利用BPDCA算法,选择时间最少、距离最短的最佳车辆行驶路径。通过组合最佳导航路径上各节点处发出的 “0”“1”信号判断该位置车辆的行驶方向。当安装在车辆上的运动传感器检测到当前节点上方有其他运动的车辆时,该节点将会发出频率信号,安装在上方车辆上的光电探测器将会接收此频率信号,将此信号转换成驾驶员可以识别的信息显示。当该车辆通过了所在节点,那么此节点将变成后续车辆自动导航的指示信息。同样,当车辆需要离开当前车位时,传感器将检测到的车辆变化信息发送到系统,系统将为车辆做好出库路线的规划。
3 实验系统测试与分析
为了验证本文设计的基于可见光通信自动导航系统的性能,建立了大小为1 m×1 m×1 m的实验系统进行定位和导航测试,实物照片如图7所示。
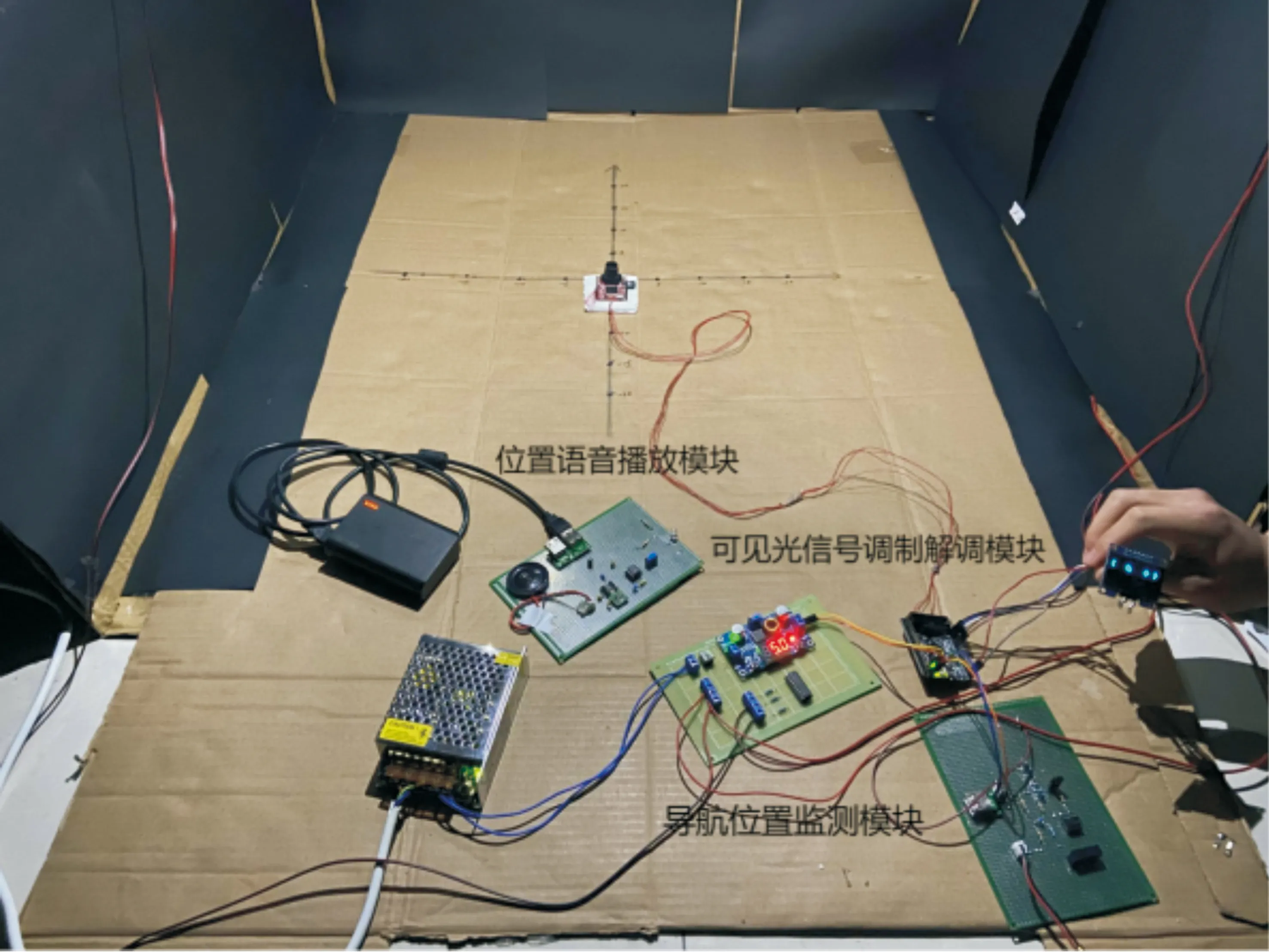
图7 系统实物图
3.1 定位系统测试
根据系统实物图将4个象限分成了A、B、C、D 4个区域,在每个区域中各随机选取10组定位数据进行分析,各区域的定位数据如表1所示。
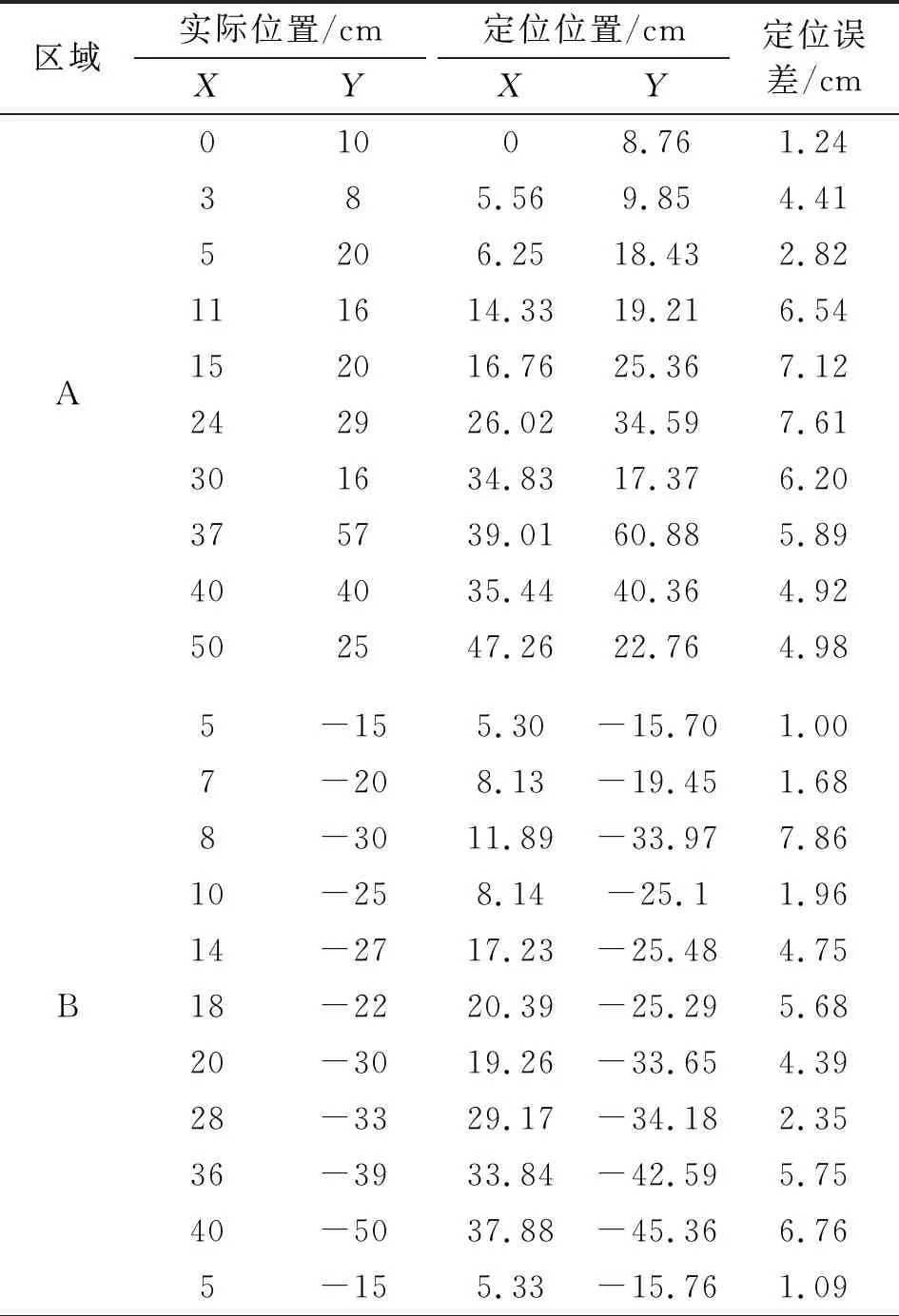
表1 定位测试数据表
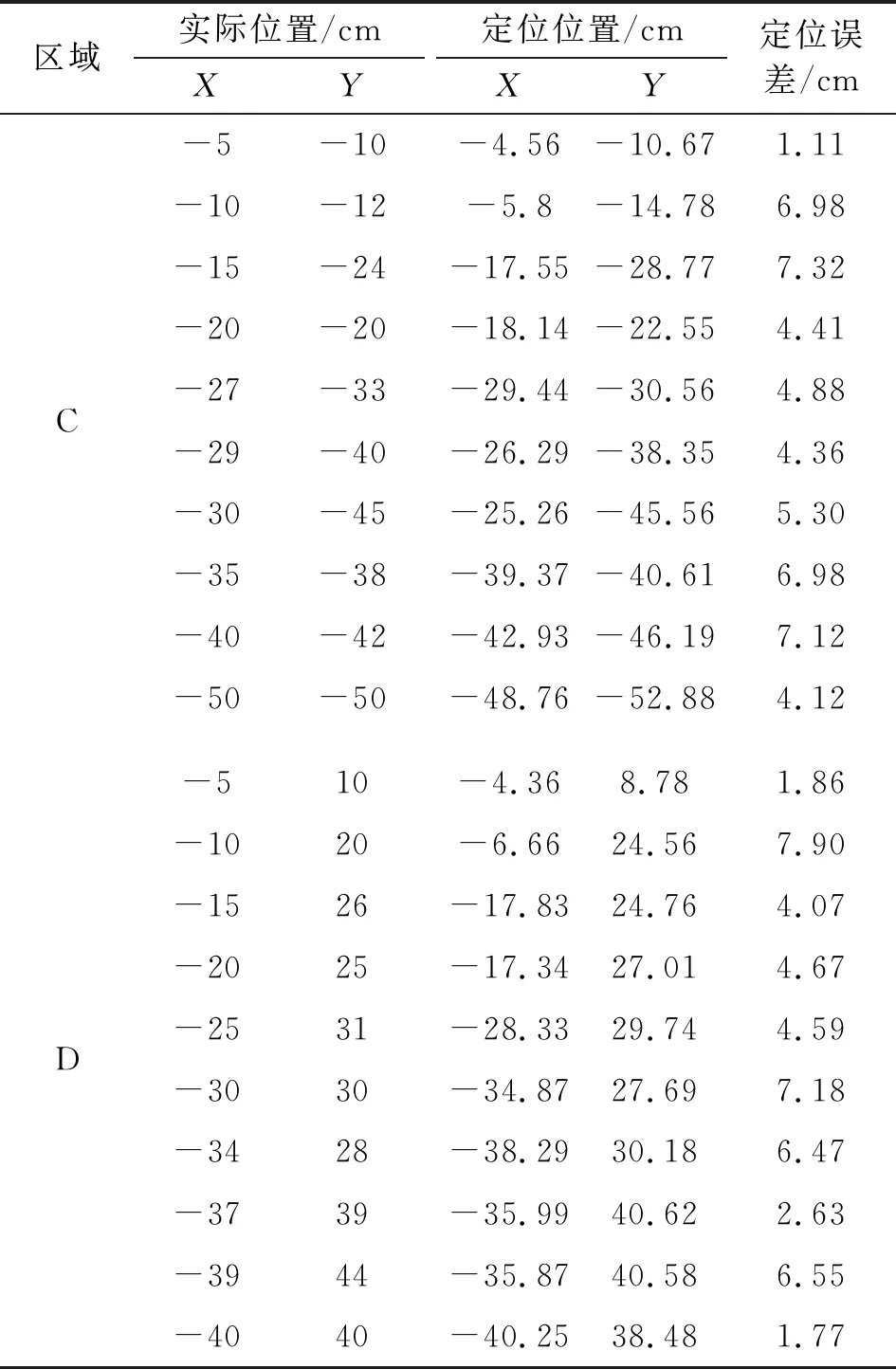
表1(续)
分析表1数据可知,经40次定位实验,系统的平均定位误差为4.85 cm,最大定位误差为7.90 cm,最小定位误差为1 cm。本系统与文献[5-7]定位系统定位误差的比较如图8所示。
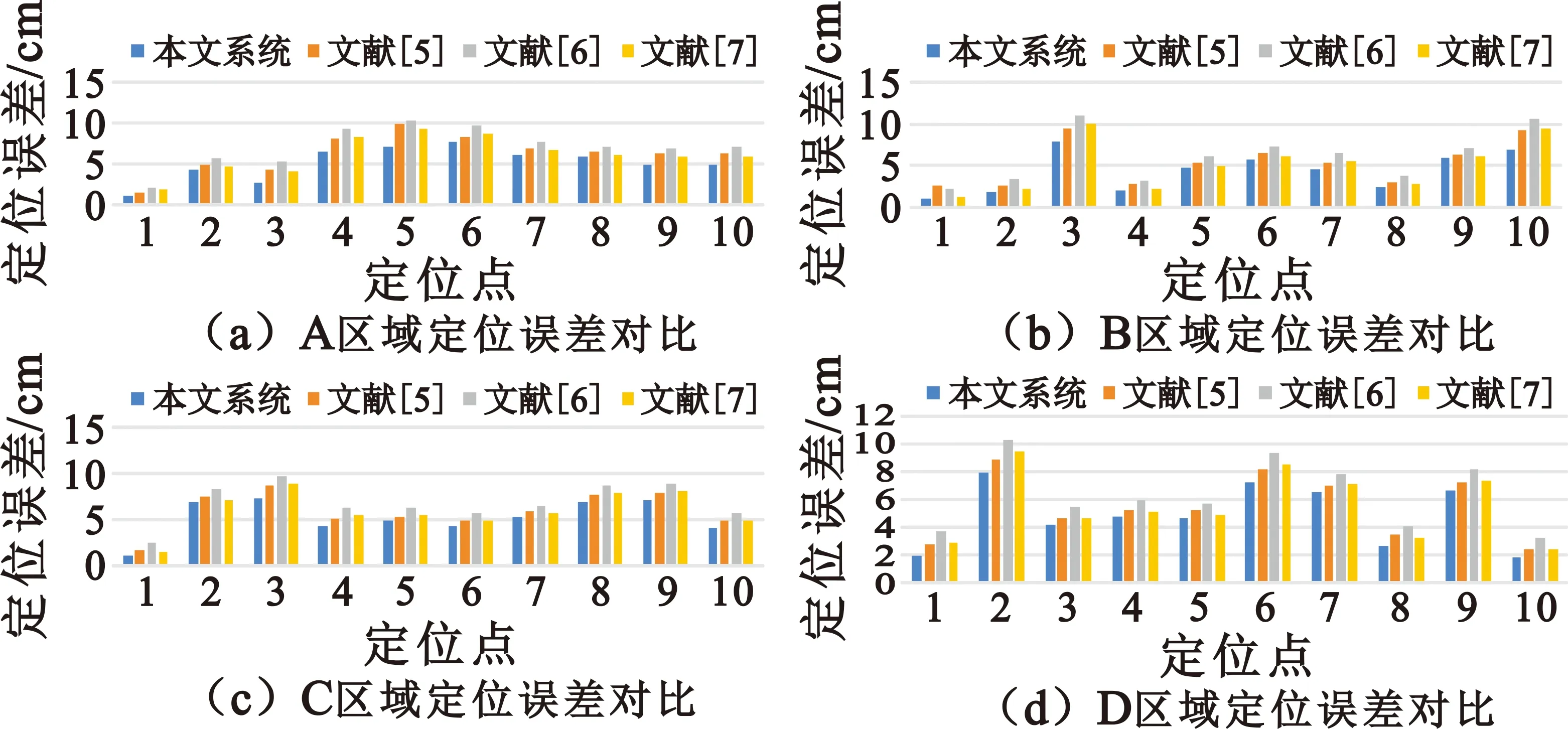
图8 与文献[5-7]定位误差对比图
图8的结果表明,本系统的定位误差较小,定位精度较高,可满足自动导航的需求。
3.2 自动导航路径测试
为验证本系统自动导航的性能,以部分空闲停车位作为实验对象,如图9所示,对导航系统的路径进行测试,并与文献[14]进行对比,测试结果如表2所示,导航路径规划如图10所示。
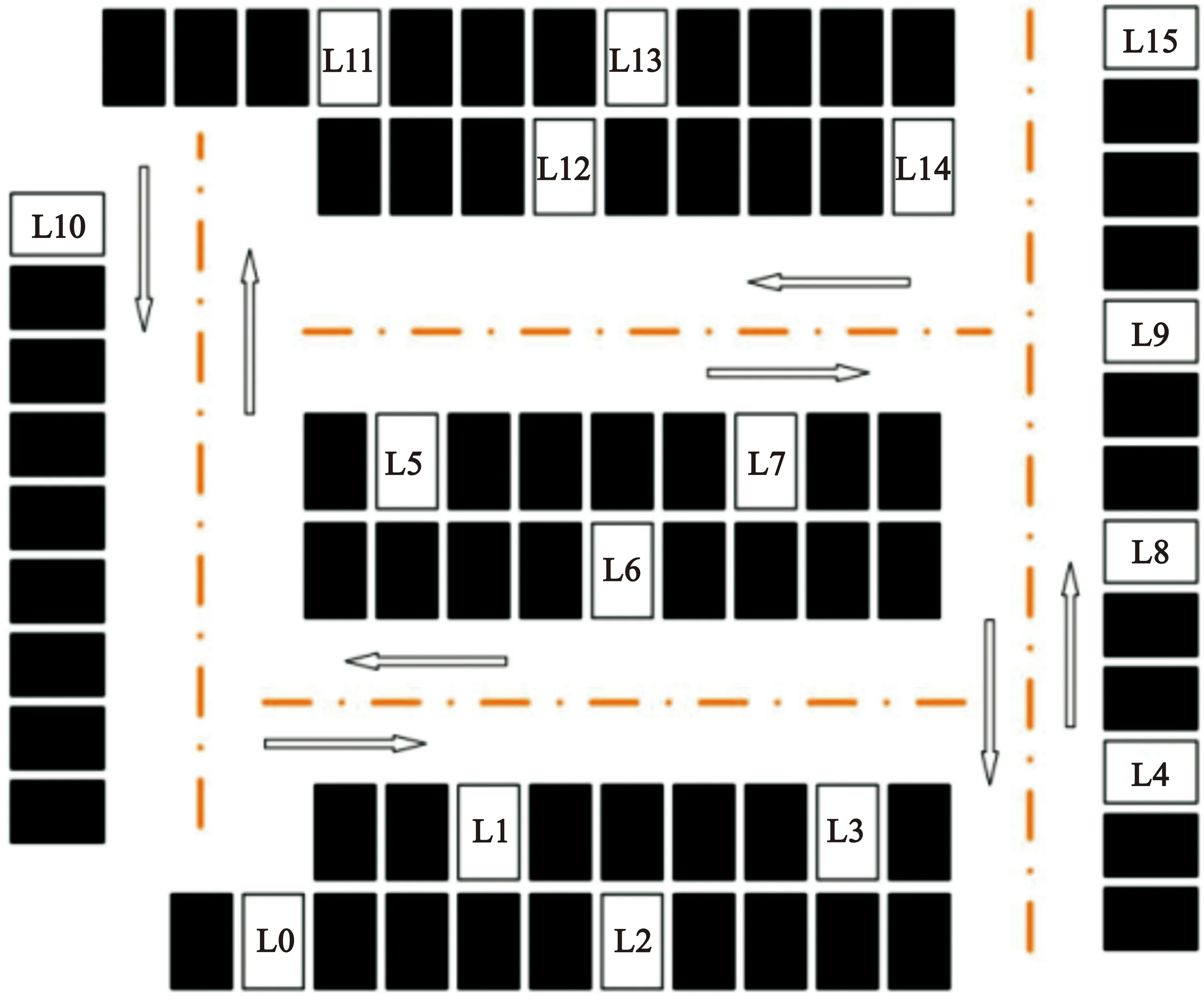
图9 停车场车位示意图
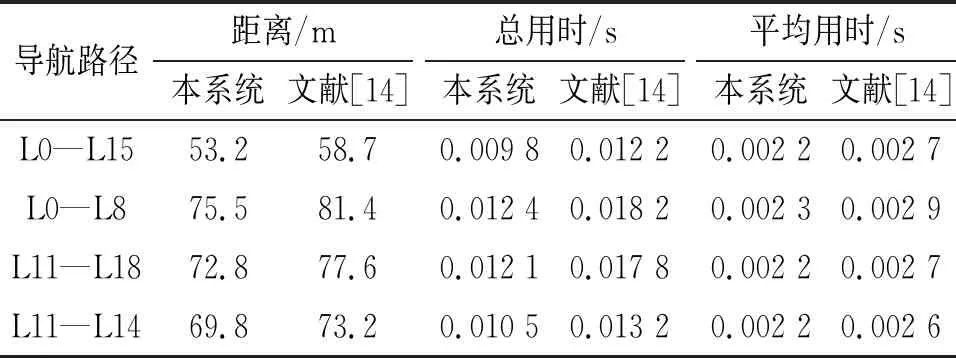
表2 导航测试结果
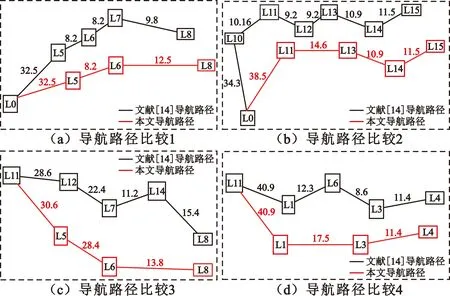
图10 导航路径规划图
分析表2和图10的结果可知,与文献[14]相比,本系统的路径规划距离更近,系统的导航精度更好,经过路径所需要的时间更少,因而提升了自动导航系统的效率。
4 结 论
本文提出了一种利用照明LED的可见光通信自动导航系统,通过使用BDPCA聚类算法高效地计算出系统最佳导航路径,利用光强检测的方法对定位坐标实施精准定位,快速有效地监测停车场内空闲车位并进行最优的路径规划。实验结果表明,本系统的最大定位误差为7.90 cm,平均定位误差为4.85 cm,降低了26%,提升了定位精度;最佳导航路径距离更短,所用时间平均降低了20%。本文的研究可以为可见光的定位导航提供一定的参考。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
火控雷达技术(2021年2期)2021-07-21
中学生数理化·中考版(2019年10期)2019-11-25
电子制作(2019年24期)2019-02-23
铁道通信信号(2018年8期)2018-11-10
电子制作(2018年17期)2018-09-28
支点(2016年11期)2016-12-22
铁道通信信号(2016年3期)2016-06-01
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
现代防御技术(2014年6期)2014-02-28