NLOS环境下5G毫米波定位方法
2022-12-06 09:52:10张千坤陈任翔钟志刚周国栋中讯邮电咨询设计院有限公司北京00048中讯邮电咨询设计院有限公司郑州分公司河南郑州450007
邮电设计技术 2022年10期
张千坤,陈任翔,钟志刚,周国栋(.中讯邮电咨询设计院有限公司,北京 00048;.中讯邮电咨询设计院有限公司郑州分公司,河南郑州 450007)
1 概述
随着智能设备与无线网络的普及,人们对于场景感知、环境智能等应用需要在不断增加,同时对用户位置信息精度的要求也在不断提高。目前在室内定位方面,无线网[1-3]、蓝牙[4]、超宽带(UWB)[5]等的定位技术开始普及,但是对于运营商来说,这些技术需要专门建立一个定位网络,成本比较高。针对室内定位的特点,目前室内定位的方法主要围绕提高定位精度、降低定位成本、提高系统定位鲁棒性(适应复杂多变的室内环境)等方面展开,如何利用运营商自有的5G 网络进行高精度定位一直是需要攻克的难题。目前在5G 定位[6-7]方面使用比较多的是UTDOA(Uplink Time Difference Of Arrival)定位技术,这种定位技术需要基站之间同步,实现起来比较困难,而且需要终端同时接收到3个射频拉远单元(PRRU)才能实现定位,在NLOS 环境下无法进行定位,这种定位条件在室内环境下很难达到。5G 毫米波[8]波束窄、方向性好,有极高的空间分辨力,信号传输周期小,时间精度高,基于此,本文研究了在NLOS 环境下的5G 毫米波室内定位方法,首选进行混合波束赋形下的信道估计,其次采用OMP 算法对AOA、TOA 以及AOD 进行估计,最后在室内环境下建立NLOS 环境模型,并对终端进行定位。
2 大规模MIMO信道估计
2.1 毫米波信道模型
毫米波大规模MIMO 为了减少硬件成本,降低功耗,采用数模混合波束成形架构[9],如图1所示。

图1 混合波束赋形架构
假设基站端和用户端分别有NBS和NMS根天线,同时有根RF 链路,数据流Ns需要满足Ns≤≤NMS,上行链路基站端接收的信号可以表示为:

式中:
(·)H——共轭转置
W、F——混合波束赋形生成器,W=WRFWBB以及F=FRFFBB
WRF和FRF——模拟波束形成器
WBB和FBB——数字波束形成器
H——上行信道矩F=FRFFBB阵
s——用户发射的基带信号
n——复高斯白噪声AWGN,
由于毫米波在非直射路径(NLOS)环境下路损严重,接收机只能接收到有限个显著散射体的多径信号,假设有L个路径信道矩阵可以写为:

式中:
αl——信道的复增益
θl和φl——到达角和离开角
aBS(θl)和aMS(φl)——导向矢量,可以表示为:
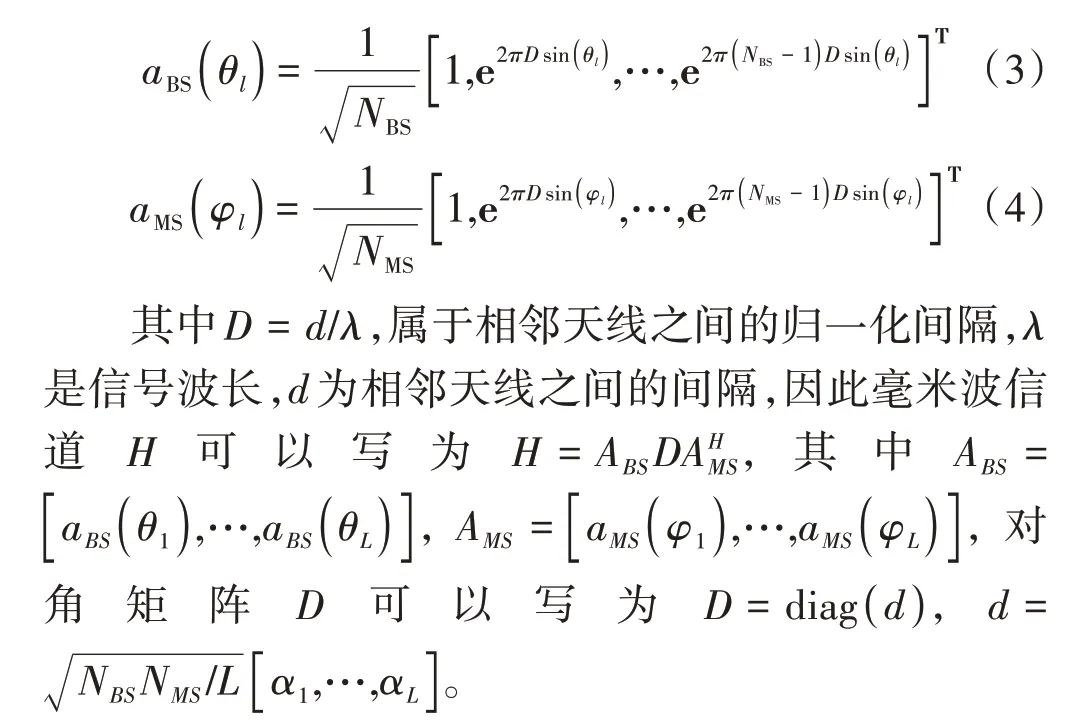
2.2 毫米波信道估计
利用OMP[10]对AOA、AOD 和TOA 进行估计,首先构造字典矩阵,利用字典矩阵对信号参数进行估计,因此字典矩阵中应该包括AOA、AOD、TOA 3 个参数。假设天线阵列天线数为M,子载波数为N,AOA、AOD、TOA 3 个参数的搜索范围和搜索步长确定,AOA 的搜索范围和搜索步长确定的搜索角度值组成向量searching_aoa,AOD 的搜索范围和搜索步长确定的搜索角度值组成向量searching_aod,TOA 的搜索范围和搜索步长确定的搜索角度值组成向量searching_toa,因此,由AOA 的第i_aoa[1≤i_aoa≤length(searhcing_aoa)]个搜索角度构造的原子为:

其中,Θaoa(i_aoa)的维度为M×length(searching_aoa),f为信号频点,d为天线之间的间距,c为光速。
由 AOA 的第i_aod[1≤i_aod≤length(searhcing_aod)]个搜索角度构造的原子为:

其中,Θaod(i_aod)的维度为M×length(searching_aod),f为信号频点,d为天线之间的间距,c为光速。
由AOA 的第i_toa[1≤i_toa≤length(searhcing_toa)]个搜索角度构造的原子为:

其中,Θtoa(i_toa)的维度为M×length(searching_toa),f为信号频点,d为天线之间的间距,c为光速。
因此,由第i_aoa 个搜索角度、i_aod 个搜索角度和第i_toa个搜索时延构造的字典矩阵为:

其中,Θ的维度为(MN)×[length(searching_toa)×length(searching_toa)]。假设接收阵列接收到的接收信号为y,初始化残差r0=y,索引集Λ0=∅,将字典矩阵中的每一个原子,即字典矩阵的每一列分别与残差进行内积运算,找到字典矩阵中与残差的投影系数最大的原子,并将该原子从字典矩阵中删掉。然后更新残差值。直到满足迭代终止条件t>K,此时,K表示待估计的信源个数。因此待估计的信号的AOA、AOD 和TOA 3 个参数就等于依次找出的字典矩阵中与残差的投影系数最大的原子对应的AOA、AOD和TOA。
3 毫米波NLOS环境室内定位
3.1 模拟LOS环境虚拟基站
NLOS 环境如图2所示,由于基站与用户之间受干扰源遮挡,不存在直射路径,信号经过散射体的反射、折射将信号传送到用户。

图2 NLOS环境
为了方便计算,本文将AOA、AOD、TOA 的数学公式表示为:
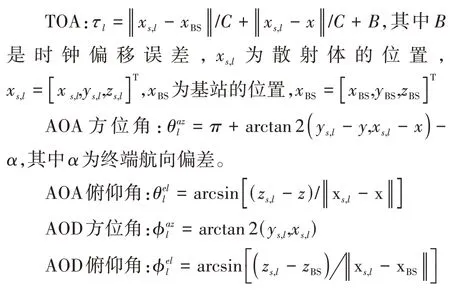
根据空间几何关系,利用AOD、时钟偏移量B、以及基站的位置xBS,飞行时间τl可以确定一个点sl,表示为:
sl=xBS+ρl,其中ρl=τl-B,表示的是信号从基站到达用户的真正时间。散射体xs,l即在基站xBS与sl2点之间的线段上。
根据AOAθl以及sl的位置可以确定另外一个点,表示为:

用户的位置x即在点sl和之间的线段上。则点sl可以表示为和用户处于LOS环境的虚拟基站。
3.2 多虚拟基站联合定位
根据参数[φl,θl,α,B],可以确定用户位置x所处的线段,即点sl和之间的线段l,假设有L条路径,L条路径的交点即是用户x的位置。
为了避免噪声的干扰,本文在同一个位置进行多次采样求平均值,对每个采样点n=1,2,…,Ns,得到sl和之间的线段l后,可以计算虚拟基站与用户之间的AOA,表示为γ,则可利用虚拟基站与用户通过联合多个虚拟基站的AOA 信息对目标进行定位,这里假设有R个虚拟基站,利用最小二乘算法[11-12]得到目标的位置为:

其中x(n)表示的是第n个采样点得到的UE 的位置表示第i个虚拟基站到位置p的角度,γi为位置p估计的角度。
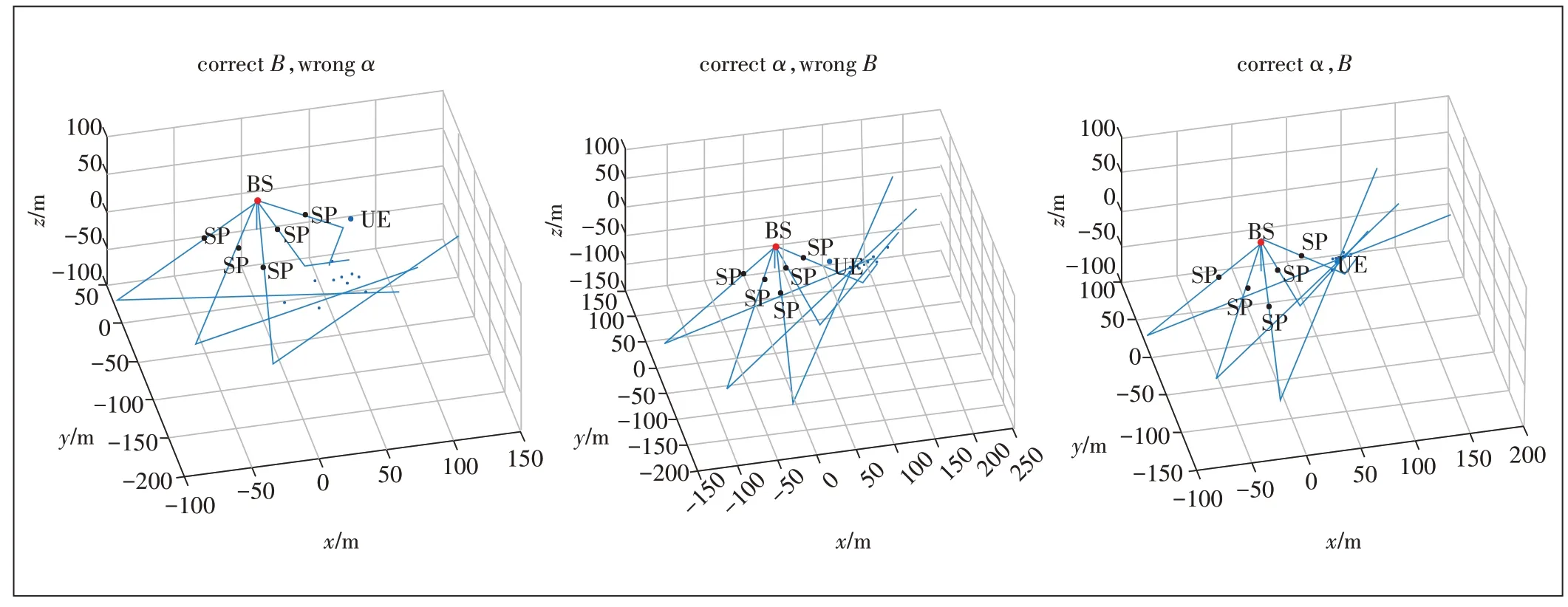
图3 不同[α,B]对应的UE的位置
将(α,B)的误差表示为:

计算终端UE位置的期望和方差:
则最优的(α,B)可以表示为:

在得到最优(α*,B*)以后可以解算出准确的用户位置,再结合AOA即可以得到散射体SP的位置。
4 仿真分析
本文假定一种场景,有5个散射体,TOA 的标准差为10 cm(换算为距离),AOA 和AOD 的标准差为0.01弧度,(α,B)的值设为α=π/3,B=20 m,基站的位置已知,AOA、AOD、TOA 可以通过信道估计得到,采样点的数量设定为10,首先对(α,B)的最优值(α*,B*)进行估计,结果如图4所示,其中蓝色的点表示的为真实的(α,B),红色的点表示的是估计的(α*,B*)。
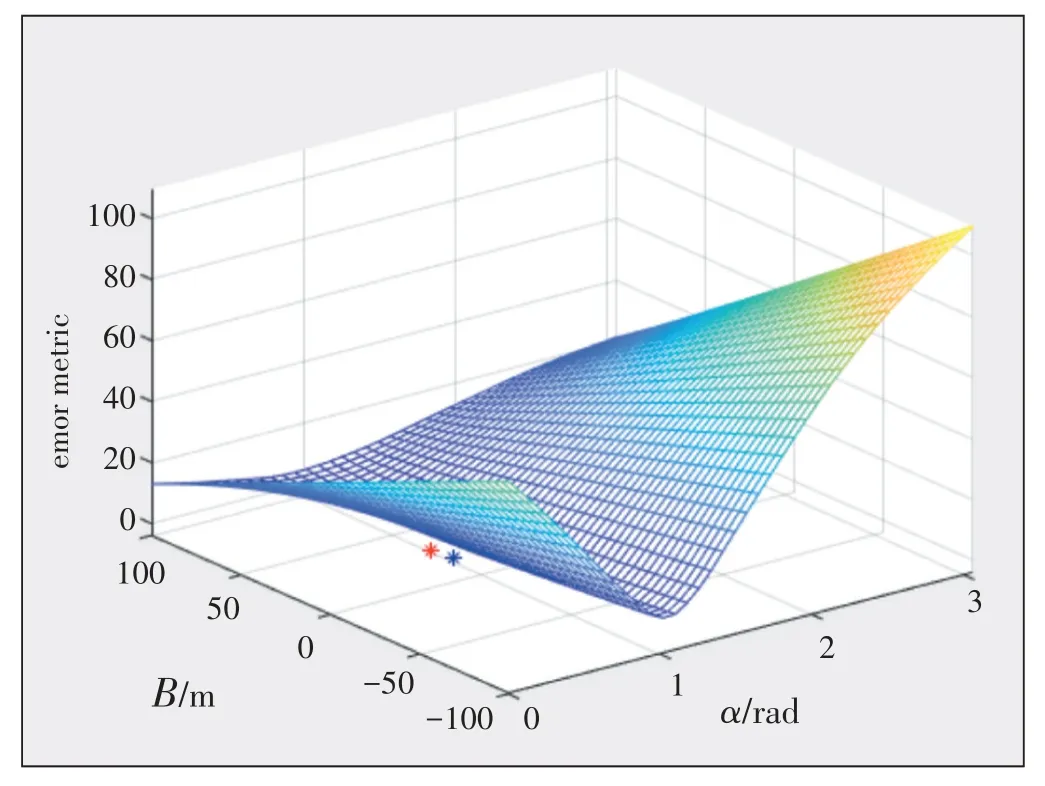
图4 仿真结果——真实的[α,B]以及估计的[α*,B*]
在得到(α*,B*)以后,即可对UE 的位置以及散射 体的位置SP进行估计,如图5所示。

图5 仿真结果——UE的位置以及SP的位置
其中红色的点为真实的位置,蓝色的点为估计出的位置,由于(α,B)是未知的,因此其准确性对UE 的位置以及SP 的位置有很大的影响,本文对(α,B)进行粗略的估计,主要解决的是在NLOS 环境下无法定位的问题。
5 结论
本文提出一种算法复杂度低的5G 毫米波NLOS环境下的室内定位方法,在用户位置、时钟误差、终端航向偏差未知的情况下,通过信道估计得到的AOA、AOD、TOA 信息,构造虚拟基站,规避严重NLOS 场景下障碍物的遮挡现象,并根据空间位置关系推导出UE的位置以及散射体SP 的位置,仿真结果表明,该算法可以估计出用户的位置以及散射体SP的位置,解决在NLOS环境下无法定位的问题。
猜你喜欢
家教世界(2023年28期)2023-11-14 10:13:50
家教世界(2023年25期)2023-10-09 02:11:56
电讯技术(2022年1期)2022-02-12 05:16:12
无损检测(2019年11期)2019-11-20 07:07:50
通信技术(2019年3期)2019-05-31 03:19:08
电子测试(2018年6期)2018-05-09 07:31:54
石油地球物理勘探(2017年2期)2017-11-23 06:01:26
声学与电子工程(2017年1期)2017-06-22 11:30:09
创新作文(小学版)(2016年19期)2016-08-22 05:54:08
城市勘测(2016年2期)2016-08-16 05:58:24