
远离航道海域低频海洋环境噪声垂直指向性
2022-12-05 07:49:10单元春林建恒衣雪娟江鹏飞孙军平
声学技术 2022年5期
单元春,林建恒,衣雪娟,江鹏飞,孙军平,李 娜
(1.中国科学院声学研究所北海研究站,山东 青岛 266114;2.中国科学院大学,北京 100049)
0 引言
海洋环境噪声是海洋声信道中的背景声场,包含大量的环境信息与噪声源信息,它不仅是海洋中目标探测的干扰声场,又是海洋波导环境和相关噪声源的重要信息源。而海洋环境噪声垂直指向性既可以表征噪声源的方向特性,又可以反映出海洋环境噪声的传播特性,还可以作为反演海洋环境特性的声场特征[2]。
早期,Kuperman等[3]提出了被广泛采用的K/I模型,利用简正波理论计算了分层海洋中海洋环境噪声空间特性。之后Harrison[4]提出一种利用射线理论计算海洋环境噪声垂直指向性的方法,并且对比了3D算法与N×2D算法计算的垂直指向性。Yang等[5]利用互谱密度矩阵仿真计算了海洋环境噪声垂直指向性。杨坤德[6]等通过仿真计算,讨论了深海5 000 m完全声道的风关海洋环境噪声垂直指向性。衣雪娟等[7-8]通过射线理论仿真计算了斜坡海底情况下,海洋环境噪声的垂直指向性。
以上研究大多基于风关噪声等频率较高的噪声源,Knudsen等[9]与Wenz[10]的研究发现,深海低频(10~500 Hz)海洋环境噪声主要来自于航船与地震等噪声源的贡献,在10~100 Hz频段内,航船噪声级较其他类型噪声级更高,所以是该频段内的主要噪声源。
本文基于一次南海某海域的实测海洋环境噪声数据,并假设低频环境噪声主要来自于远处航道的大型航船贡献的航行噪声,利用3D射线算法,考虑复杂地形中声线的水平折射效应,计算了低频海洋环境噪声的垂直指向性,并与实测数据处理结果进行了比较。通过实验数据与计算结果分析了垂直接收阵阵元间距与能够形成稳定垂直指向性的海洋环境噪声频率之间的关系,给出了当阵元间距与波长之比大于1/2时,利用垂直阵测量分析海洋环境噪声垂直指向性的适用情况。
1 航道内航船引起海洋环境噪声三维模型
1.1 航船噪声空间分布模型
根据实验期间的舰船自动识别系统(Automatic Identification System,AIS)数据,绘制出如图1所示的航船轨迹,图中A点为水听器接收阵位置,蓝、红、绿线分别表示实验第1、2、3 d的航船轨迹。可以看出,实验期间航船较为密集的区域位于半径跨度140~270 km范围内的两个扇环之间。将航船轨迹图进行简化,得到图2所示的两个大扇环区域,其中R1扇环区位于距离接收阵140~210 km、水平方位角为170°~280°的区域;R2扇环区距离接收阵210~270 km、水平方位角为210°~280°。
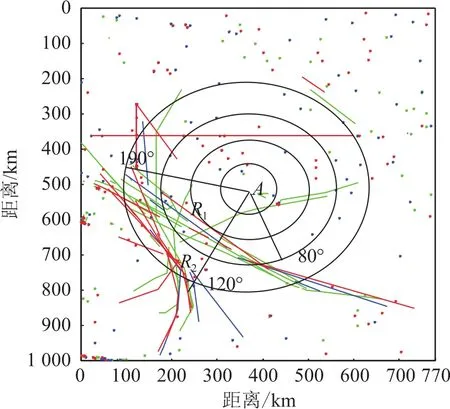
图1 实验期间实验海域航船轨迹Fig.1 Trajectory of ships during the experiment
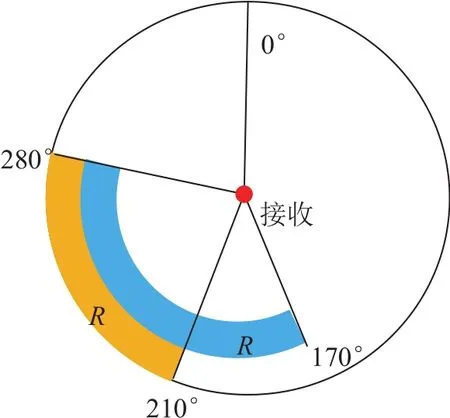
图2 简化航道区域模型Fig.2 Simplified model of ship lane area
假设航船在R1与R2两个扇环内均匀分布,且由于航道内的航船多为大型商船、邮轮等,这类船的平均吃水深度在10 m左右,所以设两个扇环内的噪声源均位于海平面以下10 m处。
1.2 海洋环境噪声垂直指向性
位于深度zs、水平距离rl、方位角θm处的点噪声源,在深度为zn的接收阵第n个阵元处产生的声压为P(zn,rl,zs,θm),则接收点处的海洋环境噪声场为各海面噪声源在接收点产生声场的叠加:

式中:Il,m表示单位面积内的声强,Sl,m表示单位面积,代表距离与方位角上的随机相位信息,Ψl与Ψm为0~2π之间均匀分布的随机数。

海洋环境噪声的垂直指向性可以通过噪声的互谱密度计算,令q为平面波阵响应向量:

式中:k表示平面波矢量,β为俯仰角,xn表示方向矢量,n为接收阵元序号,N为垂直接收阵阵元数。通过垂直阵测得的海洋环境噪声垂直指向性定义为

式(5)表征海洋环境噪声随俯仰角的变化关系,其中C为互谱密度矩阵。为便于对比,本文中将式(5)获得的垂直指向性仿真结果进行归一化处理。
2 低频航船海洋环境噪声垂直指向性
2.1 实验环境及数据处理
海洋环境噪声获取实验在中国南海南部某海域进行,采用如图3所示的由一根电缆连接的32阵元等间隔垂直水听器阵,可以保证32个阵元采集到的数据是同步的,相邻阵元间隔为20 m;垂直阵阵元的深度分布范围为265~885 m,布放处水深为2 370 m,由布放在海面附近与浮球相连接的电池仓为其提供长时间供电。海试时的声速剖面如图4所示,其中深度小于2 000 m的声速采用CTD实测获取,深度大于2 000 m的声速是根据经验公式计算所得。
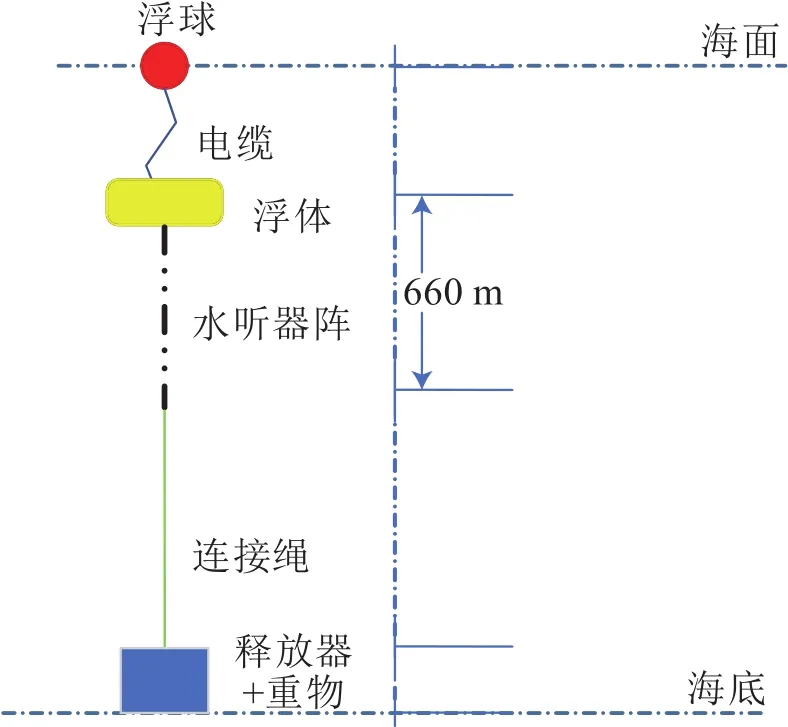
图3 海试期间水听器阵布放示意图Fig.3 Deployment of hydrophone array during the experiment

图4 实验期间的声速剖面Fig.4 Sound speed profile during the experiment
实测环境噪声的垂直指向性为

式中:Xzn(f)是第n个阵元接收到的噪声频域信号,上方的“横线”表示对多个时段的处理结果取平均,zn为水听器的深度,θ为声波到达方向与阵列法线方向的夹角:-90°≤θ≤90°,计算时角度间隔为1°,波数k=2πf/c(c为水中的参考声速),n为阵元序号。为方便对比,对式(6)得到的B(θ)进行归一化处理,则得到归一化后的实测环境噪声的垂直指向性。
2.2 不同频率实测与仿真垂直指向性
2.2.1 实测海洋环境噪声垂直指向性
图5~7分别为试验期间第15、42、65 h的不同频率海洋环境噪声垂直指向性图像,0°对应水平方向,角度为负时对应海面方向。可以看出,由于接收阵远离航道区域,所以低频噪声主要来自于水平方向,且主要集中于-30°~30°范围内,来自海面方向与海底方向的环境噪声贡献很小,可以认为,当距离接收阵较远处存在航道时,航道内的低频航船噪声以接近水平方向入射垂直接收阵,且海底反射与海面反射的声能量很小,可以忽略。

图5 在试验的第15 h测量的海洋环境噪声不同频率时的垂直指向性图Fig.5 Vertical directionality patterns of ocean ambient noise at different frequencies measured at the 15th h of the experiment
由图1~2可知,虽然在大部分时间段内,大型航船位于航道区域内,但是某些时段内,在距离接收阵较近处也有航船经过,在这些时间段内,垂直指向性图像的主瓣不会集中在-30°~30°范围内,而是出现如图8所示的情况。
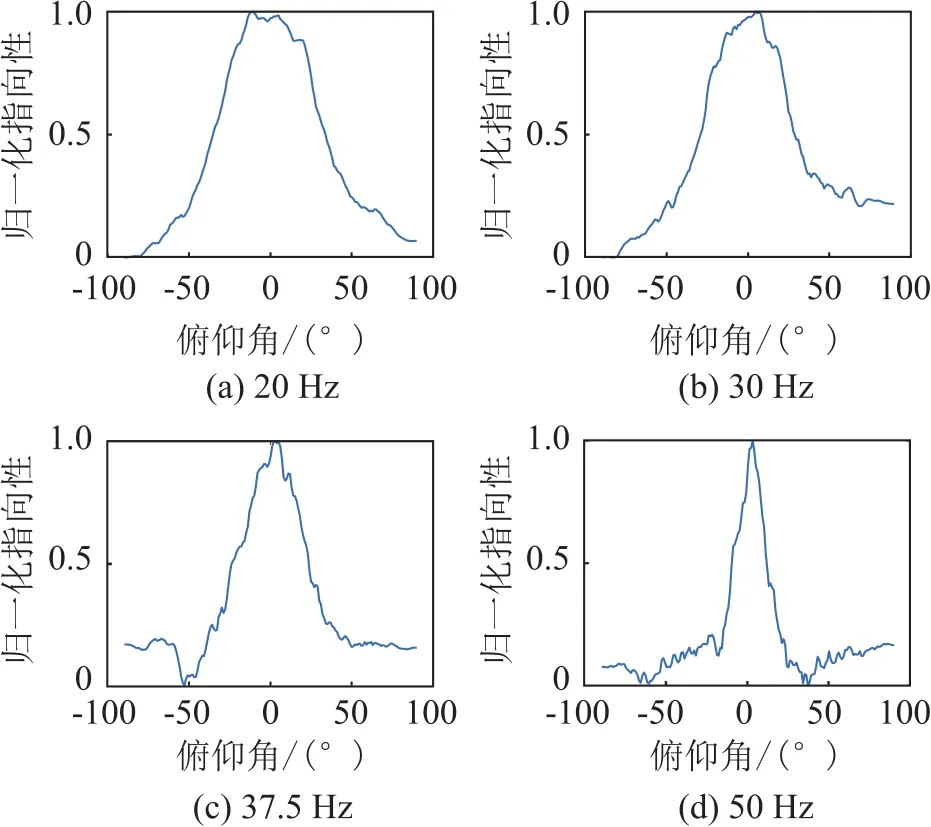
图6 在试验的第42 h测量的海洋环境噪声不同频率时的垂直指向性图Fig.6 Vertical directionality patterns of ocean ambient noise at different frequencies measured at the 42nd h of the experiment

图7 在试验的第65 h测量的海洋环境噪声不同频率时的垂直指向性图Fig.7 Vertical directionality patterns of ocean ambient noise at different frequencies measured at the 65th h of the experiment
观察图8中频率为50 Hz时的垂直指向性图像,发现在-90°~50°方向,垂直指向性图像出现了副极大,在50°~90°范围内也有较高的翘尾,但是20 Hz、30 Hz与37.5 Hz的图像在对应的角度并没有出现较高的副极大与翘尾,只是主瓣位于-50°~50°范围内,主瓣宽度相比图4~6而言较宽。出现这种情况的原因在于,当接收阵的相邻阵元间距d与单频噪声的波长λ之比不超过1/2,即d/λ≤1/2时,均匀线阵接收到的来自任意方向信号形成的垂直指向性图像在-90°~90°的角度范围内不会出现影响主瓣的副极大,而50 Hz环境噪声的波长为30 m,海上实验与仿真计算时,垂直均匀线阵的阵元间距为20 m,此时d/λ≤2/3,在这种情况下,只有当线阵接收到的信号来自-30°~30°时,垂直指向性图像在-90°~90°范围内才不会出现副极大,图9与图10分别给出d/λ≤1/2与d/λ≤2/3时,信号从不同方向入射均匀线阵时的垂直指向性图像。

图8 在试验的第61 h测量的海洋环境噪声不同频率时的垂直指向性图Fig.8 Vertical directionality patterns of ocean ambient noise at different frequencies measured at the 61st h of the experiment
均匀线阵的指向性公式为

式中:N为阵元数目,d为阵元间距,λ为波长,θ1为信号来波方向。
对比图9与图10可以看出,当信号的入射角度为0°时,二者的垂直指向性图像相同;当入射角度为20°时,d/λ=2/3,在-90°附近垂直指向性图像出现了极低的翘尾,但此时并没有出现与主瓣高度相当的副极大;而当入射角度为30°时,d/λ=2/3,在-80°附近出现了很高的副极大,对入射方向的真实信号产生了干扰。
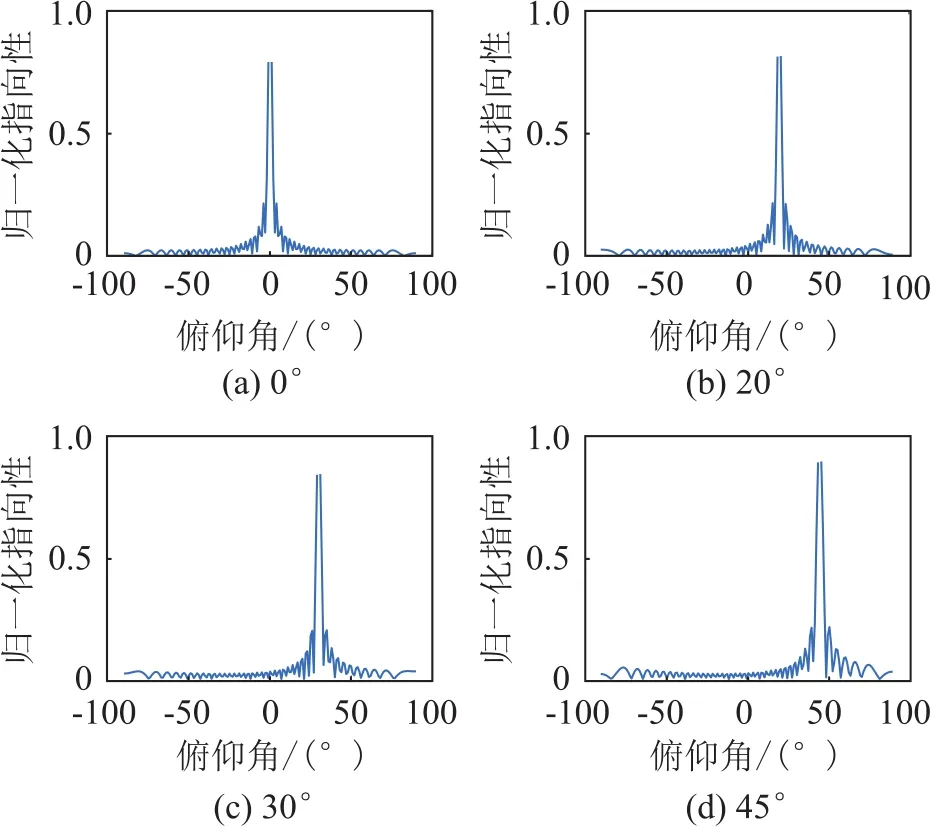
图9 d/λ=1/2时,不同方向入射信号的垂直指向性Fig.9 Vertical directivity of the incident signals in different directions when d/λ=1/2
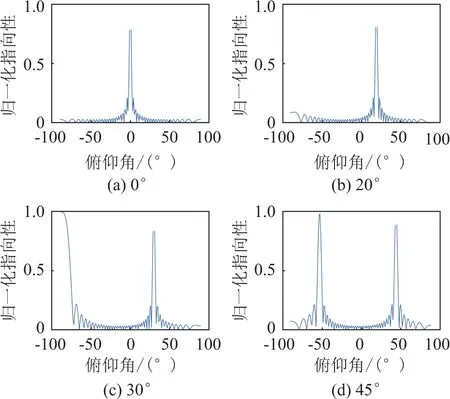
图10 d/λ=2/3时,不同方向入射信号的垂直指向性Fig.10 Vertical directivity of the incident signals in different directions when d/λ=2/3
结合图5~10可知,当d/λ≤1/2的条件无法满足时,利用均匀线阵的指向性判断信号来波方向时,需要根据信号频率来确定对应的角度适用范围。
2.2.2 仿真海洋环境噪声垂直指向性
计算时采用垂直接收阵的参数和布放方式与海试时相同,仿真地形、声速剖面和海试时岛礁地形参数、声速剖面一致。不考虑海水吸收,海水密度为1 g·cm-3。海底参数选择水平不变的单层海底底质模型,声速为1 650 m·s-1,密度为1.8 g·cm-3,衰减系数为0.517×(f/1 000)1.07。
图11为将航道简化为两个扇环形区域后,利用三维射线算法仿真计算得到的不同频率海洋环境噪声的垂直指向性,对比图5~7可以看出,低频环境噪声主要来自于水平方向,这与实验结果有一定的相似性,所以将航道简化为扇环,并且假设低频环境噪声源主要为航道内的航船环境噪声来进行仿真计算有一定的合理性,但是实验结果与仿真计算结果仍存在一些差异。如当频率为20 Hz、30 Hz以及37.5 Hz时,实测海洋环境噪声垂直指向性的主瓣宽度相对仿真结果而言更宽,说明以上3个频率的低频环境噪声不仅仅来自于位于远处航道的航船。结合如图12所示的Wenz曲线[10]来看,20~50 Hz的低频海洋环境噪声不仅来自于航船噪声,也有地震噪声与爆炸声等声源的影响,且频率越低,地震噪声与爆炸声的影响越大,所以频率为20 Hz、30 Hz以及37.5 Hz的海洋环境噪声不仅有来自远离接收阵航道处航船噪声的贡献,也有地震、爆炸声等其他声源的影响,后者到达接收阵时的入射角度比远处航船噪声到达接收阵之后的入射角度大,导致实测环境噪声垂直指向性主瓣比仿真计算得到的垂直指向性主瓣更宽。
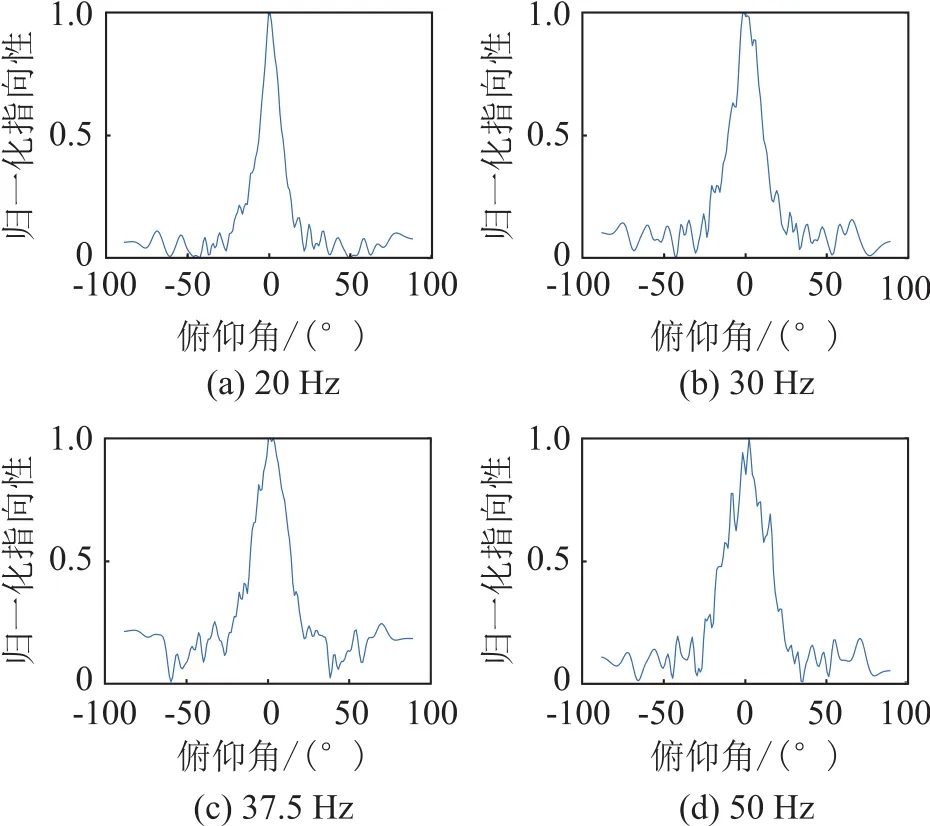
图11 利用三维射线算法计算得到的不同频率时的垂直指向性仿真结果Fig.11 Vertical directionality patterns of ocean ambient noise at different frequencies simulated by the 3D ray algorithm of sound propagation

图12 海洋环境噪声的Wenz曲线[10]Fig.12 Wenz curves of ocean ambient noise[10]
3 结论
本文基于一次岛礁复杂地形海域的海洋环境噪声实测数据,结合同步AIS航船分布数据,分析了远离航道区域频率为20~50 Hz的海洋环境噪声垂直指向性特征及其形成机理。通过三维射线声传播算法计算了当接收阵远离航道区域时,航道引起的低频海洋环境噪声的垂直指向性。结合线阵指向性与低频海洋环境噪声的贡献源,定性分析了该岛礁海域低频海洋环境噪声垂直指向性的形成原因,以及当d/λ大于1/2时,利用垂直阵获取海洋环境噪声垂直指向性的适用条件。
仿真计算时,未考虑停泊航船与小型航船的影响,将航船分布简化为扇环形航道区域虽有一定的合理性且计算结果也较符合实验数据,但是此划分方式依然较为粗糙,在后续的研究中将继续完善航道区域航船噪声的分布模型。
猜你喜欢
舰船科学技术(2023年11期)2023-07-22 08:05:12
今日农业(2021年12期)2021-11-28 15:49:26
人大建设(2018年11期)2019-01-31 02:40:50
电子制作(2018年23期)2018-12-26 01:01:04
测控技术(2018年11期)2018-12-07 05:49:22
测控技术(2018年1期)2018-11-25 09:43:42
海洋科学进展(2016年3期)2016-08-12 06:45:20
航运交易公报(2016年6期)2016-03-05 00:11:31
新课程研究(2016年21期)2016-02-28 19:28:30
中国卫生标准管理(2015年16期)2016-01-20 09:26:15
