
基于反步法的耦合分数阶反应扩散系统边界输出反馈控制
2022-12-03 14:31庄波崔宝同楼旭阳陈娟
自动化学报 2022年11期
庄波 崔宝同 楼旭阳 陈娟
耦合分数阶反应扩散系统中包含多个反常扩散的系统分量,各系统分量在扩散的同时发生反应并相互转化,这种耦合性在反应扩散系统中是普遍存在的[1].与经典的高斯扩散不同,反常扩散过程表现出幂率(Power law)和重尾(Heavy-tailed)分布的特征,其见于多种物理场景中,如连续时间随机游走[2]、通过多孔介质的扩散等[3],并广泛应用于物理、生物、工程等许多领域[4-6].耦合分数阶反应扩散系统作为一种典型的分布参数系统,在整个空间区域上进行测量和控制通常是很困难的.实际上,在很多复杂的应用场景中,如高温、高腐蚀,或涉及液体流动的应用,受到经济或技术条件的限制,通常在系统边界上进行测量和控制,其成本更低且容易实现.因此,使用边界测量值设计输出反馈的边界控制器具有重要的理论意义和应用价值.本文主要针对一类带有空间依赖耦合系数的分数阶反应扩散系统,利用反步法研究其边界输出反馈控制问题(如图1 所示).

图1 耦合系统的边界输出反馈控制Fig.1 Output feedback boundary control for coupled systems
反步法(Backstepping)是一种稳定动态系统的特殊方法,其主要思想是:寻找合适的核函数构造可逆的反步变换,将原系统映射到一个稳定的目标系统,再导出使原系统稳定的控制器和相应的控制增益.将反步法应用于偏微分方程(Partial differential equations,PDEs)边界控制问题,已经取得许多重要成果[7-10].早在2003 年,Liu[7]利用反步法研究了一类不稳定热方程的边界反馈镇定问题,其中控制增益核函数是一个连续函数,突破了此前基于离散化的方法.随后,Smyshlyaev等[8]深入研究了一类抛物型偏积分微分方程的边界控制问题,证明了核函数方程的适定性并给出了数值解和特定条件下的解析解.在文献[9]中,利用边界测量设计了指数收敛的观测器,实现了输出反馈控制,同时考虑了传感器与执行器并列和非并列的情况.关于PDEs 反步法的更多内容可参见文献[11-12].
近年来,耦合PDEs 反步边界控制成为新的研究热点[13-18].Baccoli等[13]利用反步法解决了常系数耦合的反应扩散系统镇定问题,针对扩散系数相同和相异两种情况分别设计了基于状态反馈的边界控制器,并得到了核函数矩阵的级数解.Orlov等[16]系统地研究了常系数耦合反应扩散系统的状态反馈控制、观测器设计和输出反馈控制等一系列问题.Liu等[15]研究了基于观测器的常系数耦合反应扩散系统边界输出反馈控制,并利用Poincaré不等式改进了文献[13]的结果.针对耦合反应扩散方程的研究进一步推广到具有空间依赖参数的情形[17]以及输出调节问题[18].
最近几年,分数阶反应扩散系统的边界控制问题引起了研究者的关注[19-28].Ge等[19]应用PDEs 反步法[8, 11]研究了具有Dirichlet 和Neumann 边界的分数阶反应扩散系统的边界控制问题,证明了闭环系统的Mittag-Leffler 稳定性[29-30].随后,针对一类半线性时间分数阶扩散系统研究了Luenberger 型观测器的设计[20],然后又推广到系统参数随空间变化的情形[22]和事件触发控制[23].Chen等[24]研究了带有混合或Robin 边界条件的分数阶反应扩散系统的边界控制问题,并推广到扩散系数随空间变化(各向异性)的情形[26],然后又研究了观测器设计[25]和输出反馈控制[27]等问题.Zhou等[28]深入研究了一类不稳定的时间分数阶反应扩散方程的边界反馈镇定问题,同时考虑了Dirichlet 边界和Neumann边界控制,采用Riesz 基方法和分数阶Lyapunov 方法[29]证明了闭环系统解的存在唯一性和Mittag-Leffler 稳定性.目前,针对耦合分数阶扩散系统边界控制的研究还很少.Ge等[21]针对带有空间依赖参数的耦合半线性反常亚扩散(Subdiffusion)系统,利用反步法设计了基于观测器的输出反馈控制器,并证明了闭环系统的Mittag-Leffler 稳定性.在假设设计参数与核函数矩阵同为对角矩阵的条件下,得到了核函数矩阵方程的解析解,并推广了文献[13,15-16]的结果.然而,一方面,上述研究结果中设计参数的选择范围仍存在改进的空间;另一方面,为得到核函数的解析解,需要假设核函数矩阵为对角阵或数量阵,或者满足特定的不等式,这在一定程度上增加了选择设计参数的难度.同时,当系统的耦合系数随空间变化时,很难求得核函数矩阵方程的解析解[8].这些问题在一定程度上限制了该方法的应用.
鉴于以上考虑,本文利用PDEs 反步边界控制方法,针对具有空间依赖耦合系数的分数阶反应扩散系统,设计基于边界测量的观测器和输出反馈控制器,实现边界测量、边界控制的输出反馈控制系统.利用Wirtinger 不等式[31]改进控制参数满足的条件,扩大其取值范围.针对包含空间依赖耦合系数的控制增益和观测增益核函数矩阵方程,在分析解的适定性的基础上给出数值解法,在无需假设核函数矩阵结构的条件下直接求解,从而简化设计参数的选取方法.最后,利用数值仿真验证理论结果.
1 系统模型与问题描述
考虑n个分数阶反应扩散系统组成的耦合系统

具有Dirichlet-Robin 型混合边界条件
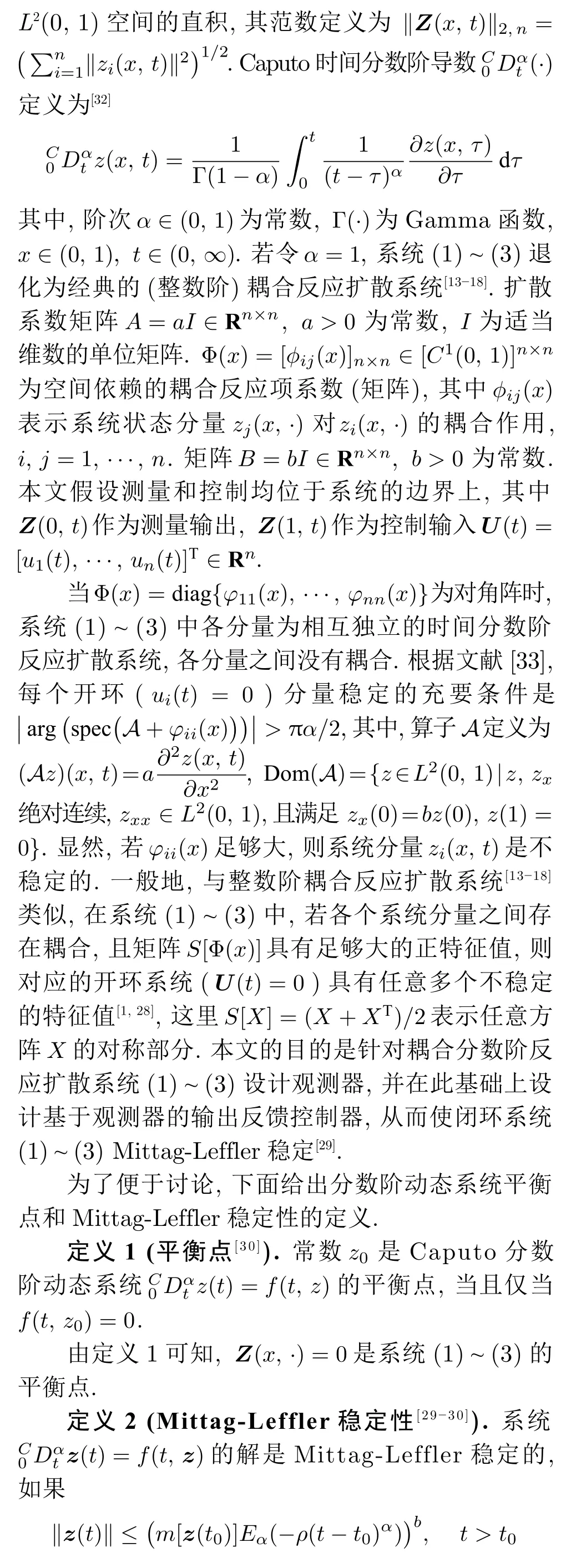

注 1.Mittag-Leffler 函数是指数函数的推广,实际上,E1(t)=exp(t). 根据定义2,当t→∞时,Eα(-ρ(t-t0)α)→0,故一个Mittag-Leffler 稳定的系统也是渐近稳定的,从而也是Lyapunov 稳定的.因此,Mittag-Leffler 稳定性也称为分数阶Lyapunov 稳定性.Mittag-Leffler 稳定性本质上是一种多项式稳定性[28].
2 基于状态反馈的反步控制器
为得到反馈控制的增益核函数,首先简要回顾利用反步法针对系统(1)~(3)设计状态反馈的边界控制器的方法和主要结果.
考虑以下可逆反步积分变换
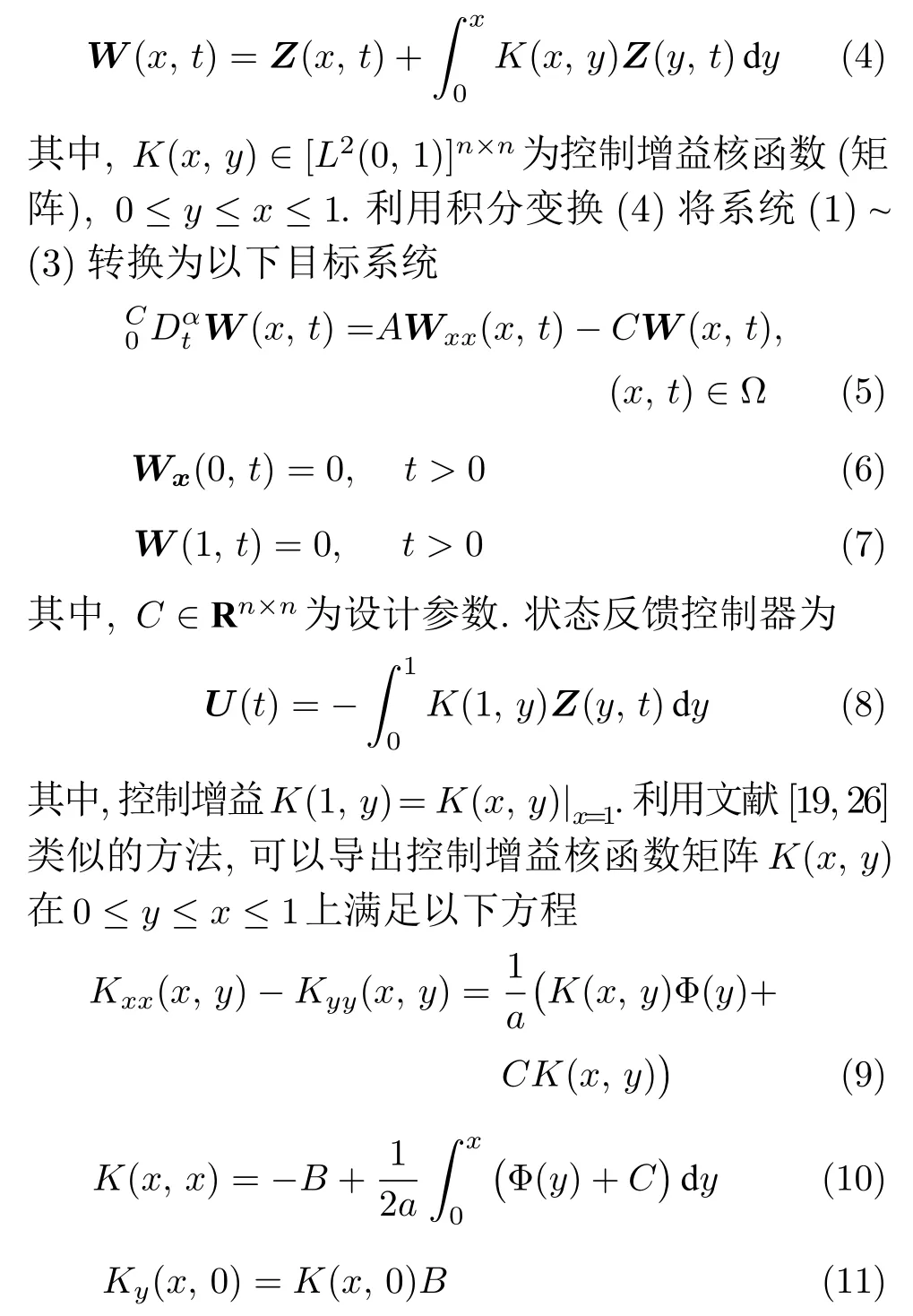
推导过程与第3.1 节类似,此处略.利用逐次逼近和数学归纳法[13,17]可以证明方程(9)~(11)是适定的.
注 2.若系统(1)~(3)耦合反应项系数Φ(x)=Φ为常数,且B=0,控制增益核函数K(x,y)=k(x,y)I,则令C=acI-Φ,其中c>0 为常数,可将控制增益核函数方程(9)~(11)化为n个相同的方程
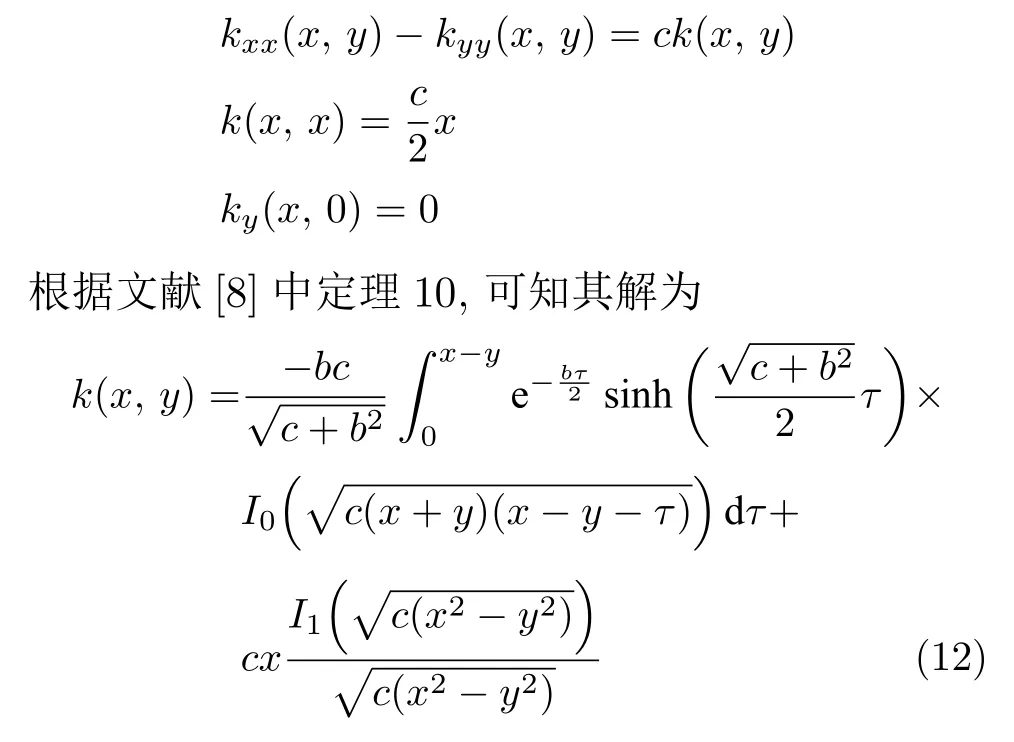
其中,In(·)为修正的n阶Bessel 函数.
另外,需要指出的是,若 Φ (x)非常数矩阵或0,要求得方程(9)~(11)的解析解是困难的.对此,本文将给出相应的数值解法.
以下为叙述方便,对任意n阶方阵X,记S[X]=(X+XT)/2 为X的对称部分,λ(X)为X的所有特征值,即X的谱,记λi(X)为 第i个特征值,i=1,···,n.对n阶实对称矩阵X,λmin(X)=min1≤i≤n λi(X)和λmax(X)=max1≤i≤n λi(X)分别表示矩阵X的最小和最大特征值.
对于式(1)~(3)和式(8)组成的状态反馈控制闭环系统,有以下结果:
定理1.对任意初值Z(x,0)∈[L2(0,1)]n,若矩阵C满足

则系统(1)~(3)在 [L2(0,1)]n空间上Mittag-Leffler稳定,即存在不依赖于Z(x,0)的常数M>0,使得
其中,控制器为式(8),控制增益核函数矩阵K(x,y)由方程(9)~(11)确定.
定理1的证明与定理4 类似,此处省略.
3 观测器的设计
为了针对系统(1)~(3)设计观测器,考虑以下估计系统

3.1 确定核函数和观测增益
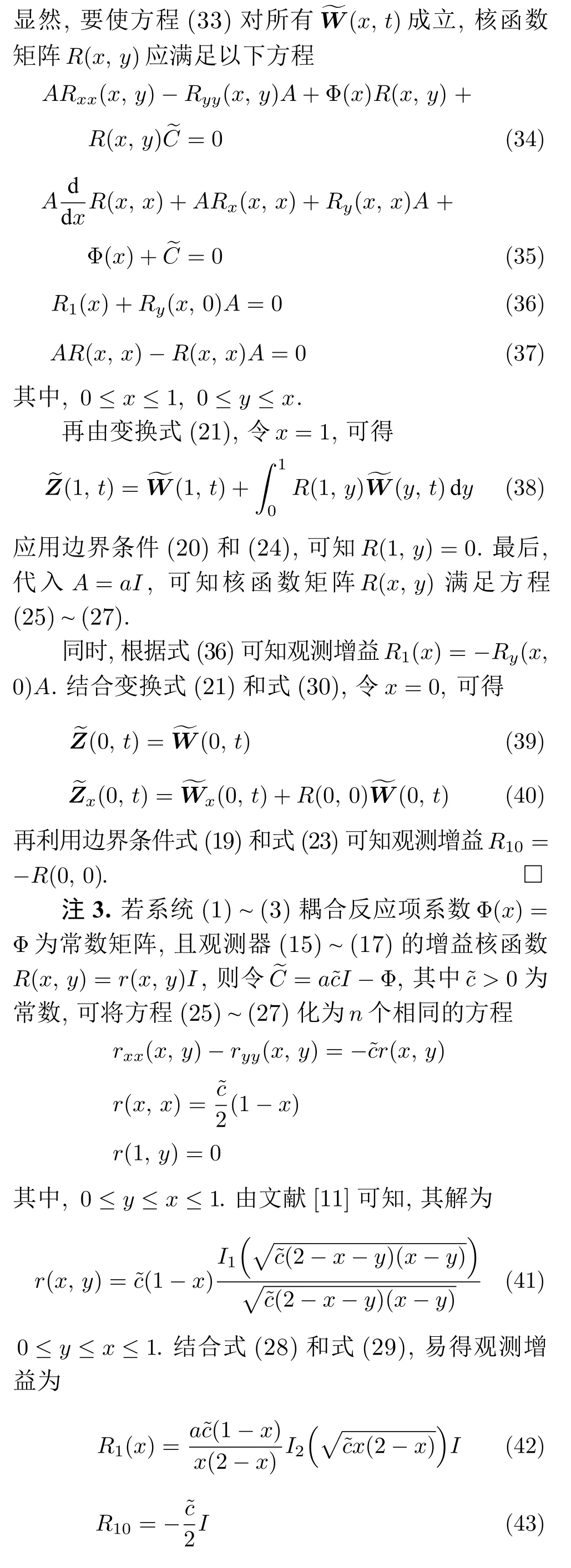
下面确定反步变换式(21)中的核函数矩阵R(x,y),进而确定观测增益R1(x)和R10.
命题 1.若核函数R(x,y)满足方程


其中,In(·)为修正的n阶Bessel 函数.
然而,若 Φ (x)非常数矩阵,则难以求得方程(25)~(27)的解析解.对此本文将给出其数值解.
关于核函数矩阵方程(25)~(27)的适定性,有以下结论.
定理2.核函数矩阵方程(25)~(27)在0≤y ≤x ≤1上有唯一解,且二阶连续可微.

其中,0≤η ≤ξ ≤2.利用文献[14] 中定理3,可知方程(47)~(49)的解是有界的.与文献[8]类似,采用逐次逼近法容易证明方程(47)~(49)的解存在且唯一,并且该解是二次连续可微的.再根据上述变换中方程的等价性,可知结论成立.
3.2 误差系统的稳定性
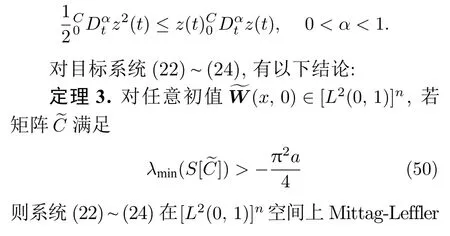
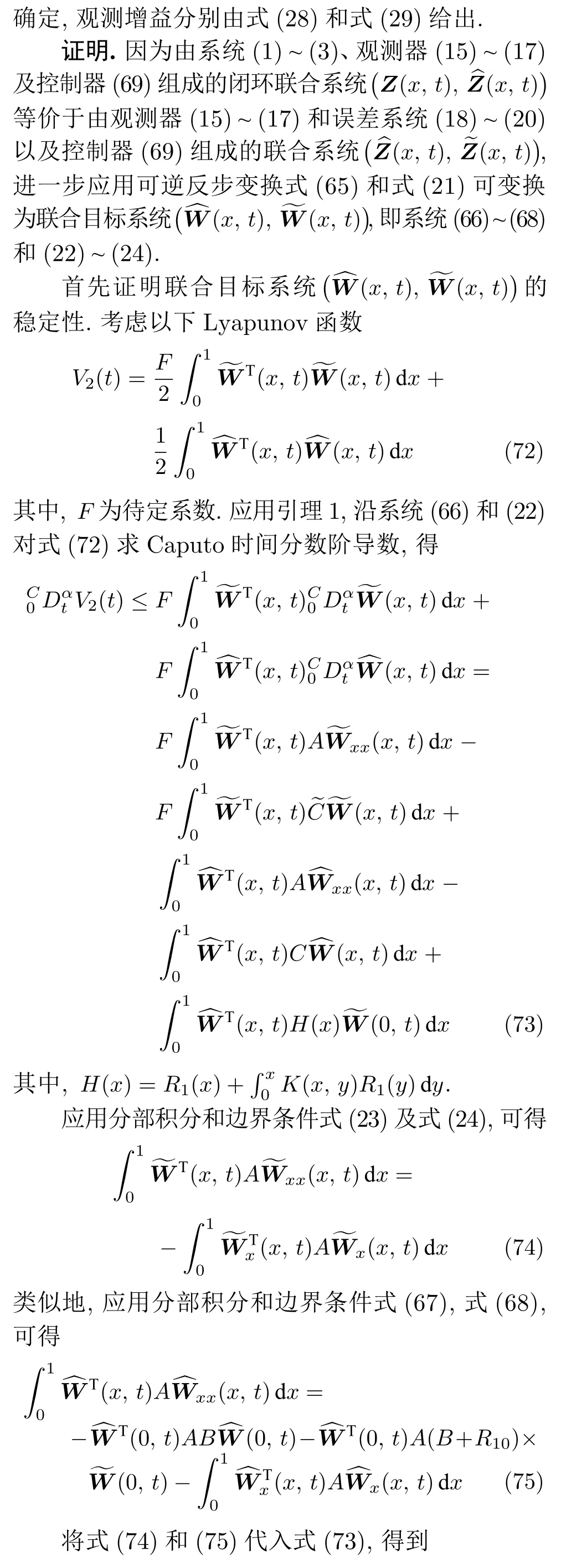
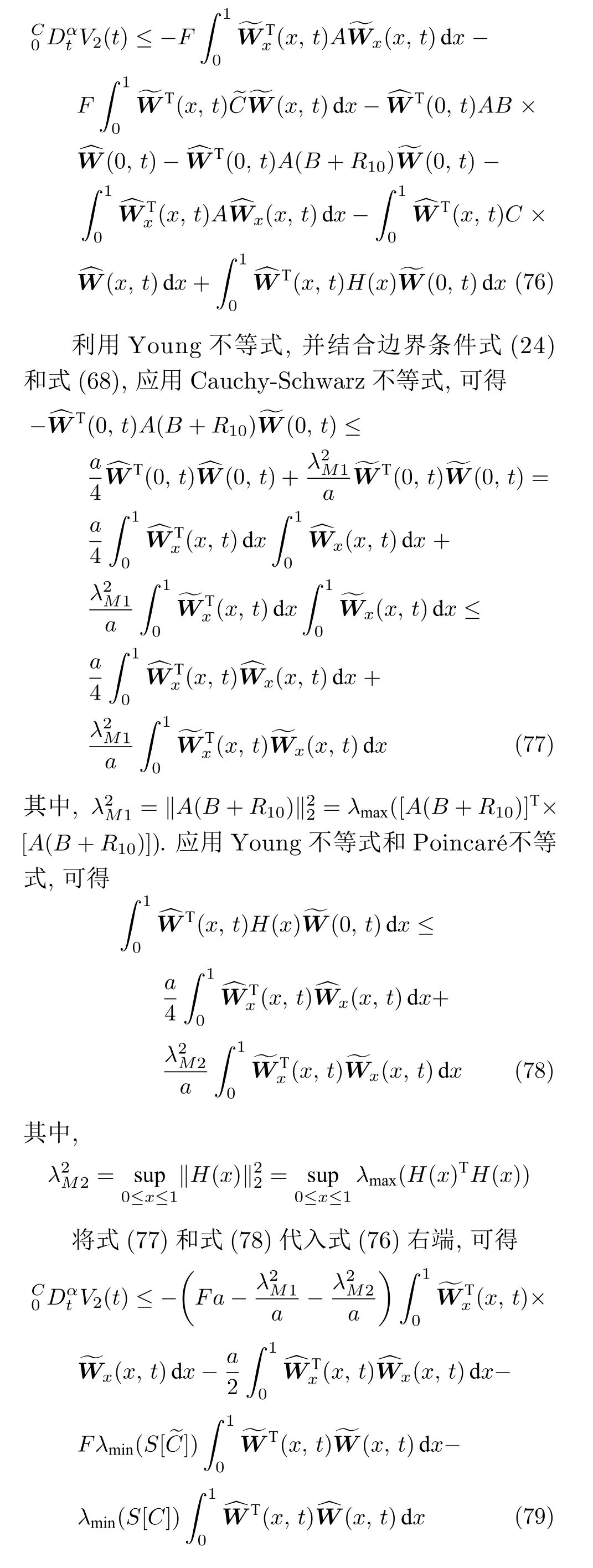
下面先考虑目标系统(22)~(24)的稳定性,再讨论误差系统(18)~(20)的稳定性.为证明目标系统的稳定性,先给出一个重要引理.
引理1[34].若z(t)∈R 是连续且可微函数,对任意时刻t≥t0≥0,有
注 4.定理3 可以看作对文献[15]中定理3的推广,由于证明过程中应用了Wirtinger 不等式[12,31]而非Poincaré不等式,所以得到的条件式(50)更加宽松,不等式右端从-a/4 降至-π2a/4,进一步扩大了设计参数的选择范围.
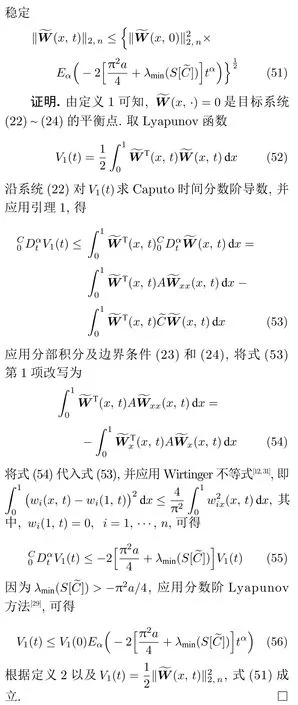
另外,根据文献[28]中引理2.1,定理3的结果式(51)可具有更紧的形式:
但这并不影响定理条件式(50).
下面说明变换式(21)是可逆的.假设其逆变换为

4 基于观测器的输出反馈控制器
为设计基于观测器的输出反馈控制器,考虑可逆的反步积分变换

从定理4 和定理5的结论可以看出,设计参数和C直接决定了观测增益核函数R(x,y)和控制增益核函数K(x,y),从而决定了观测器和输出反馈控制器的设计.另外,若要得到核函数的解析解,则需对参数施加其他约束[21].反之,若利用核函数的数值解,则可以更加灵活地选取设计参数.在实际应用中,可根据需要采取适当的策略.下面针对两种典型情况,给出两个算法实现基于观测器的输出反馈控制设计.该算法将用于第5 节的数值仿真.
数值求解核函数矩阵方程(25)~(27)和(9)~(11),分别得到观测增益(28)和(29)以及控制增益K(1,y).具体的数值解法将在第5 节给出.
显然,上述算法中矩阵和C的特征值分别为和ca,满足条件式(83)的矩阵和C同时满足定理4、定理1 和定理5的条件.
5 数值仿真
为了验证本文的理论结果,下面给出两个数值仿真例子.利用文献[36]提出的Caputo 分数阶扩散方程数值解法,针对耦合分数阶反应扩散系统(1)~(3)和观测器(15)~(17)及控制器(69)组成的闭环系统,采用有限差分方法在空间域和时间域上离散化.这里将空间域 [ 0,L] 和时间域 [ 0,T] 分别均匀划分为N和Q个区间,其中L=1,N=100,T=5,Q=500.
当 Φ (x)为 非常数矩阵时,难以求得核函数K(x,y)和R(x,y)的解析解,可采用数值方法求解对应的核函数方程(9)~(11)和(25)~(27).下面将文献[8]中提出的核函数方程数值解法推广到耦合系统,分别给出相应核函数方程的数值解法.首先对空间0≤y ≤x ≤1 离散化,令h=1/N,xi=(i-1)h,i=1,···,N+1,yj=(j-1)h,j=1,···,i.对控制增益核函数K(x,y),记Kij=K(xi,yj)∈Rn×n,Φi=Φ(xi),则有以下数值解:

为验证受控系统对测量噪声的鲁棒性,对边界测量输出Y(t)=Z(0,t)添加信噪比为 25 dB的白噪声信号,图5 给出了系统的控制输入以及系统状态L2范数和状态演化.从图5(b)~5(d)可以看出,在有测量噪声的情况下,受控系统和观测器误差系统状态均鲁棒地收敛到 0,说明本文提出的基于观测器的输出反馈控制方法对测量噪声具有较好的鲁棒性.
仿真 2.考虑由3 个 (n=3)分数阶反应扩散过程组成的耦合系统(1)~(3),其中α=0.7,a=1,b=1,空间依赖的耦合反应项系数 Φ (x)为
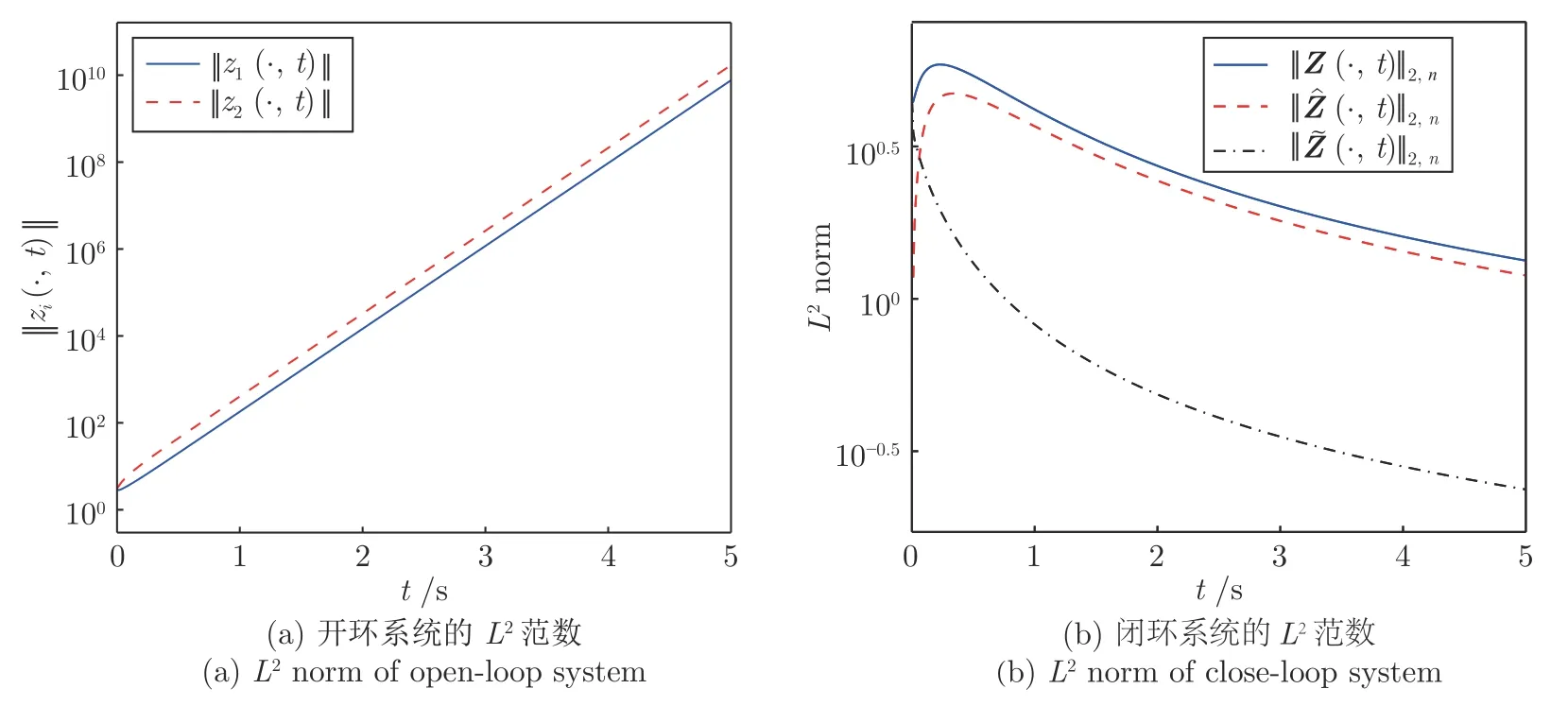
图2 开环和闭环系统的状态 L2 范数Fig.2 The state L2 norm of open-loop and close-loop systems
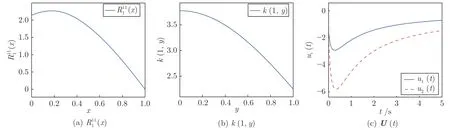
图3 观测增益,控制增益核函数和控制输入Fig.3 The observer gain and control gain kernel functions,and control input
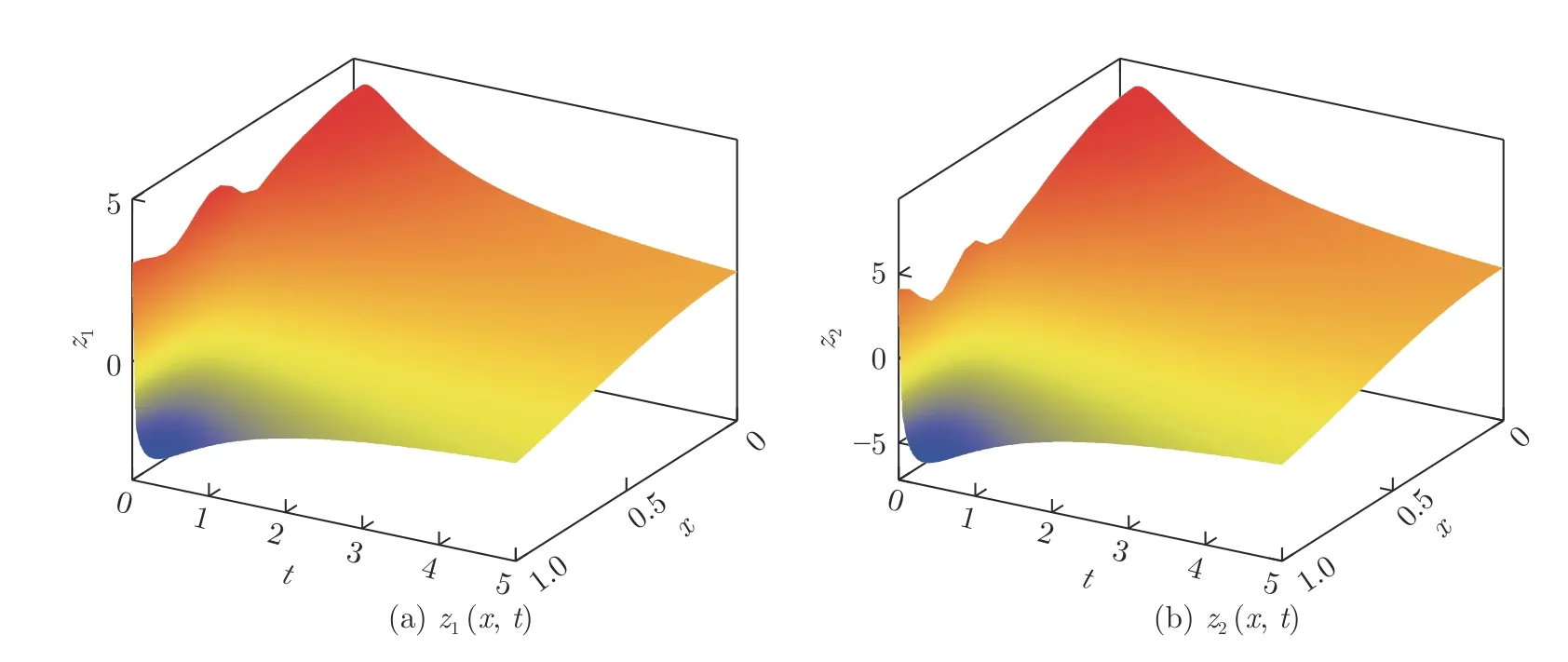
图4 闭环系统状态各状态分量的演变Fig.4 Evolution of state compoments of the close-loop system
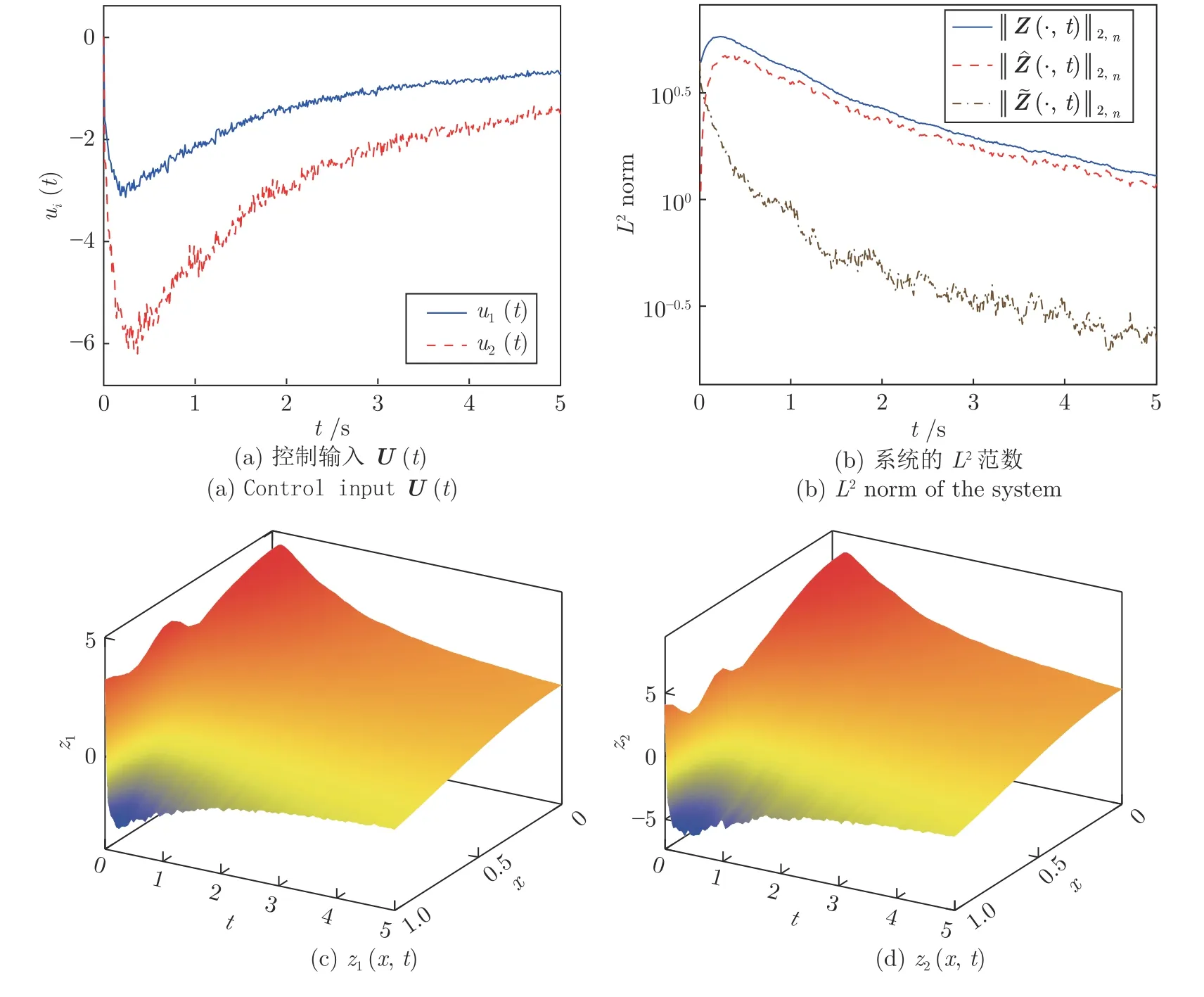
图5 存在测量噪声的情况Fig.5 The case with measurement noise

同时,数值求解控制增益核函数矩阵PDE (9)~(11)得K(1,y)=K(x,y)|x=1(图7(b)).利用式(69)得到基于观测器的边界控制输入U(t)(图7(c)).
图6(b)给出了闭环系统、观测器和误差系统的状态范数.可以看出误差系统的L2范数收敛到 0,说明了观测器(15)~(17)的有效性.图8(a)~8(c)给出了闭环系统各状态分量的时空演化过程.可见闭环系统的状态L2范数收敛到 0,这说明基于观测器的边界控制式(69)使耦合系统(1)~(3)Mittag-Leffler 稳定.

图6 开环和闭环系统的状态 L2 范数Fig.6 The state L2 norm of open-loop and close-loop systems

图7 观测增益,控制增益核函数和控制输入Fig.7 The observer gain and control gain kernel functions,and control input

图8 闭环系统的各状态分量Fig.8 Evolution of state compoments of the close-loop system
最后,图9 对比了不同控制参数下系统的状态范数,可以看出随着控制参数和c增大,受控系统的收敛速度变得更快.
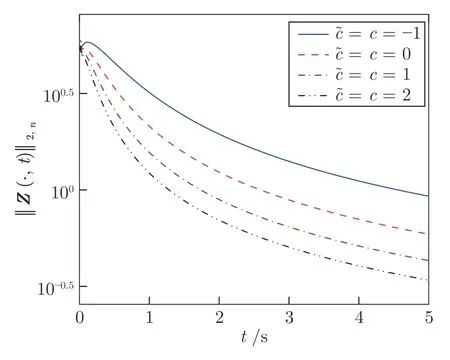
图9 不同控制参数下闭环系统的状态 L2 范数Fig.9 State -norm of close-loop systems under different control parameters
6 结束语
本文针对具有空间依赖耦合系数的时间分数阶反应扩散系统,利用PDEs 反步法提出了一种边界测量、边界控制的输出反馈控制器,选择适当的设计参数,可使闭环系统以一定的收敛速率Mittag-Leffler 稳定.首先,基于边界测量输出设计了系统观测器,选择适当的观测器参数,可根据观测增益核函数矩阵PDE 求得观测增益,并且可保证观测器的状态估计以一定的速率收敛到系统真实状态.然后,进一步利用PDEs 反步法提出了基于观测器的边界输出反馈控制器,选择合适的控制器参数,可根据控制增益核函数矩阵PDE 求得控制增益,且保证闭环系统以一定的速率Mittag-Leffler 稳定到平衡点.同时,进一步扩大了观测器和控制器设计参数的选择范围.
本文分析了观测增益和控制增益核函数矩阵方程解的存在唯一性,并且针对耦合系数为常数矩阵的情况,在假设核函数矩阵为数量阵的条件下,可以求得两个核函数的解析解.但当耦合系数矩阵随空间变化时,通常无法求得解析解.为此,本文给出了控制增益和观测增益核函数矩阵的数值解,无需预先假设核函数矩阵的结构,即可直接求得矩阵中n2个核函数,使得设计参数矩阵的选择更加简便和灵活.数值仿真验证了本文提出方法的有效性.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
中国交通信息化(2020年4期)2021-01-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
中国特种设备安全(2019年9期)2019-12-03
电子制作(2019年19期)2019-11-23
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
