
鱼菜共生环境中多参数监测系统设计与试验*
2022-12-02 06:03仇宇俊汪小旵李天沛葛朋彪
中国农机化学报 2022年12期
仇宇俊,汪小旵,李天沛,葛朋彪
(1. 南京农业大学人工智能学院,南京市,210031; 2. 南京农业大学工学院,南京市,210031;3. 苏州鼎兴斯沃水产养殖设备有限公司,江苏苏州,215011)
0 引言
鱼菜共生技术通过循环水的工艺设计将水产养殖以及蔬菜栽培二者相结合,通过养殖尾水灌溉农作物,利用植物的根系以及微生物将水中的氨氮分解成植物可以吸收的硝酸盐[1-2],促进植物的生长,同时起到净化水体的作用[3-4]。在水产养殖部分,溶解氧、pH值、电导率、氨氮都影响着鱼类的生长状况[5-6];养殖尾水经过循环灌溉农作物,又影响着种植区域植物根系附近的温度、湿度、pH值、电导率的变化[7]。水中的氨氮以离子氨(NH4+)与非离子氨(NH3)两种形式存在[8-9],离子氨是水生植物的主要营养来源之一,浓度过高会导致水体富营养化;非离子氨对鱼类具有毒性,渔业水质标准规定需要≤0.02 mg/L[10-12]。氨氮的毒性,以前常以总氨氮(TAN)的浓度表示,然而在pH值、水温不同时,即使总氨氮量一样,毒性也可能相差很大[13-14],而用非离子氨浓度表示毒性,就更为确切,但是非离子氨浓度无法直接测量,需要结合水温、pH值的信息进行推算[15]。因此,鱼菜共生系统的环境状况需要多种指标共同评估判断,实时获取鱼菜共生系统中关键的环境信息可以为水体循环以及环境安全预警提供数据支持。
物联网技术作为一种快速获取环境信息的技术,在农业环境监测中已经有了广泛的应用。在作物栽培的过程中,通过获取土壤墒情、空气温湿度等不同环境信息,结合专家知识进行多参数联合决策[16-19];在水产养殖的过程中,通过融合水质信息、气象信息、图像信息等关键信息,对养殖塘进行智能调控与集中管理[20-21]。鱼菜共生系统则是需要同时对两个部分的环境进行监测从而进行调控[22-23],但是现有的投入实际应用的氨氮传感器大多采用离子选择电极测量离子氨浓度[24],并未对氨氮的组成进行区分,仅依靠离子氨浓度无法判断水质情况,而且氨氮传感器需要定期维护校正,否则会产生一定的测量误差。
为满足对鱼菜共生环境参数的实时获取、远程调控、多元分析等需求,本文设计了以GPRS DTU(GPRS data transfer unit)模块[25-26]为核心的鱼菜共生环境监测系统,该系统获取鱼菜共生系统内的各项环境信息并且传输至云平台显示在PC端以及移动端,实现实时监测、远程调控、数据存储功能,并且通过多参数的变化趋势分析水质情况。同时针对现有的氨氮传感器长时间使用后存在测量误差问题,利用该系统获取的连续数据建立离子氨浓度的多元线性回归模型,实现一定时间范围内的离子氨浓度预测,为科学决策、提高生产效率提供数据支持。
1 系统整体结构设计
基于GPRS的鱼菜共生环境监测系统主要包含感知层、网络层和应用层三层结构,整体结构框架设计如图1所示。
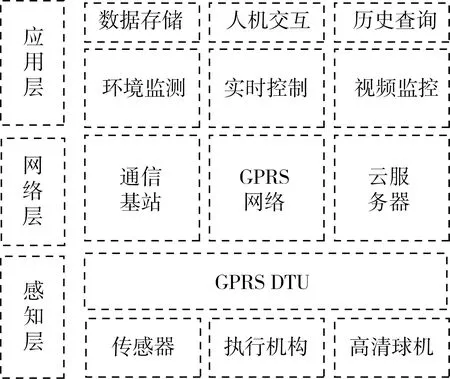
图1 系统的整体结构设计
感知层包括GPRS DTU模块、环境信息获取模块、环境调控模块。GPRS DTU模块主要负责网络的通讯与指令的中转。环境信息获取模块通过布置水质传感器、土壤传感器、高清球机来获取鱼菜共生系统内各个区域的环境信息。环境调控模块中的执行机构包括安装在水循环系统中的电磁阀以及养殖区域的增氧泵,用于控制养殖水的循环、植物的灌溉以及水体的增氧。
网络层为GPRS通信基站、运营商网络以及云平台服务器。云平台服务器下发采集指令,通过GPRS通信基站传输至感知层进行执行。感知层采集到的环境信息将通过GPRS DTU转发至附近的GPRS通信基站,最终存储于云平台服务器。
应用层即用户端。依托云平台设计并实现网页、微信小程序等人机交互界面,在PC端及移动端实现环境监测、实时调控、视频监控、数据存储等功能。
2 系统实现
2.1 硬件系统
2.1.1 网络通讯部分
负责指令中转与网络通讯的核心设备GPRS DTU型号为USR-IO424T。USR-IO424T是一种物联网无线数据终端,采用高性能的工业级的通信处理器和工业级无线模块,利用公用运营商网络GPRS网为用户提供无线长距离数据传输功能。同时提供RS485接口,可直接连接串口设备,实现数据透明传输功能,采用直流12 V供电,具备4路开关量输出,支持Socket连接远程服务器,通过RS485级联多个Modbus RTU设备。
设备通过支持GPRS服务的物联网卡实现与远程服务器之间的通信。设备通过串口连接PC端上位机离线配置云端服务器IP地址、TCP协议端口号以及RS485波特率。重新上电后注册到移动的网络,发送建立Socket的请求包给移动运营商,移动运营商把这个请求发送到因特网,云端的服务端软件接收到请求后建立连接,并发送应答信息,Socket连接建立后完成双向通信。
2.1.2 传感器部分
本系统通过多个传感器获取了鱼菜共生系统所处的空气温湿度、水产养殖区域的水质信息、蔬菜栽培区域的环境信息共11项环境参数。
在水产养殖部分,通过传感器实时监测水温、溶解氧、离子氨浓度、pH值、电导率5项水质指标。溶解氧传感器采用荧光法测量[27],无需电解液,传感器探头不会极化且不会消耗养殖水中的氧,采用自动温度补偿,溶解氧测量范围为0~20 mg/L,分辨率为0.01 mg/L。氨氮传感器采用离子选择电极,可以检测出养殖水中的离子氨浓度,测量范围为0~18 000 mg/L,分辨率为0.01 mg/L。在蔬菜种植部分,通过传感器实时检测种植区域温度、湿度、电导率、pH值的变化,土壤传感器均采用性能稳定的插针式土壤传感器。
各传感器具体型号如表1所示,各自的寄存器地址、寄存器数量以及数值类型有所区别,在数据采集前需分别配置相应的设备地址与波特率。
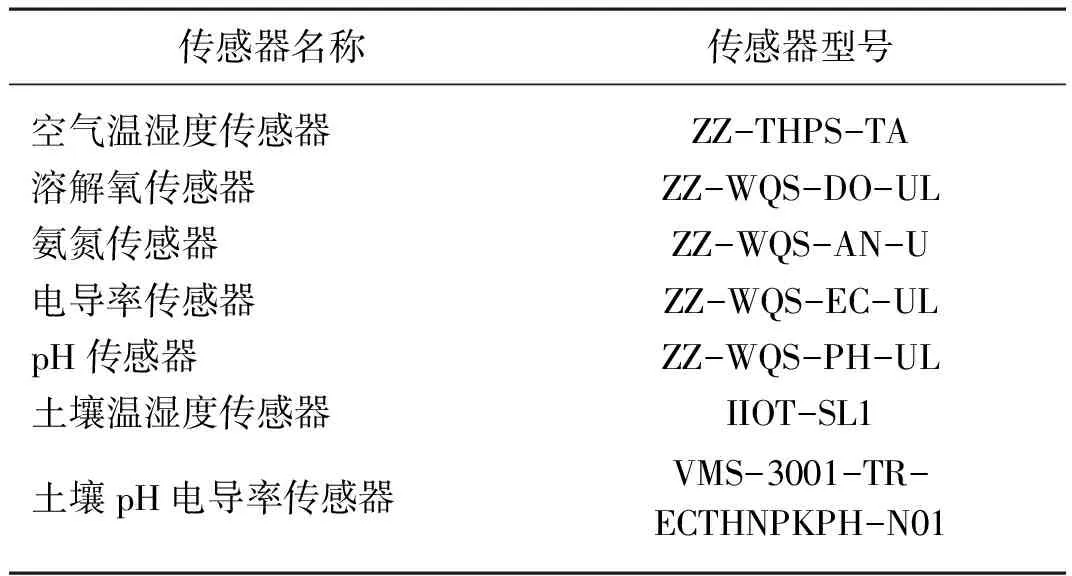
表1 传感器的型号与设置Tab. 1 Sensor model and settings
2.1.3 高清球机部分
选用型号为CS-XP1的萤石球机用于鱼菜共生系统内部视频信息的获取。该球机配有标准的RJ45接口以及4G底座,既可以通过网线接入网络交换机,也可以通过4G底座自行接入云端。内置64 G内存卡,视频数据可以上传到云服务器,也可以存储在本地,实现24 h的实时监控,方便管理。将球机接入云端后,用户可以通过PC端和移动端实时察看整个系统的运行状况。
2.1.4 执行机构部分
通过IO34-424T的4路开关量输出控制小型电磁继电器JZX-22F实现执行机构的开闭。一般情况下,保持执行机构所处的工作电路处于恒定的12 V或24 V工作电压下,电磁继电器处于常闭触点下,继电器二极管两端与额定24 V直流电源串接在IO34-424T的DO、DCOM口,通过远程控制IO34-424T的开关量输出信号使二极管导通,继电器吸附节点,从而使工作电路导通,执行机构两端工作在额定电压,执行机构启动。将执行设备例如电磁阀、增氧泵并接到工作电源两端,实现PC端或者移动端远程控制设备的开闭。
2.2 软件系统
2.2.1 传感器通信协议
所有的传感器采用Modbus RTU通信协议,默认波特率为9 600 bps,1个起始位,8个数据位,无校验,1个停止位,并接在12 V的直流电源上统一进行供电。
Modbus RTU通信协议数据传输流程如图2所示,云端通过无线网络下发指令,经过Modbus TCP/RTU协议转换,通过串口打包下发给各个传感器;传感器上报数据帧时,同样经过Modbus TCP/RTU协议转换,将数据帧上传到服务器。

图2 Modbus RTU通信协议数据传输流程
2.2.2 数据采集流程
图3为环境数据采集流程图。在传感器接入系统之前,通过RS485转USB的串口连接上位机软件预先对其进行参数设置与校准。与云端建立通讯之后,定时下发读取数据的指令帧,传感器接收到指令帧后将寄存器内的实时数值上发到云端服务器,通过将所得十六进制数据值转换成十进制的真实值后存储至云端服务器。环境数据后续可以实时显示并且对一定时间内的变化进行趋势分析。
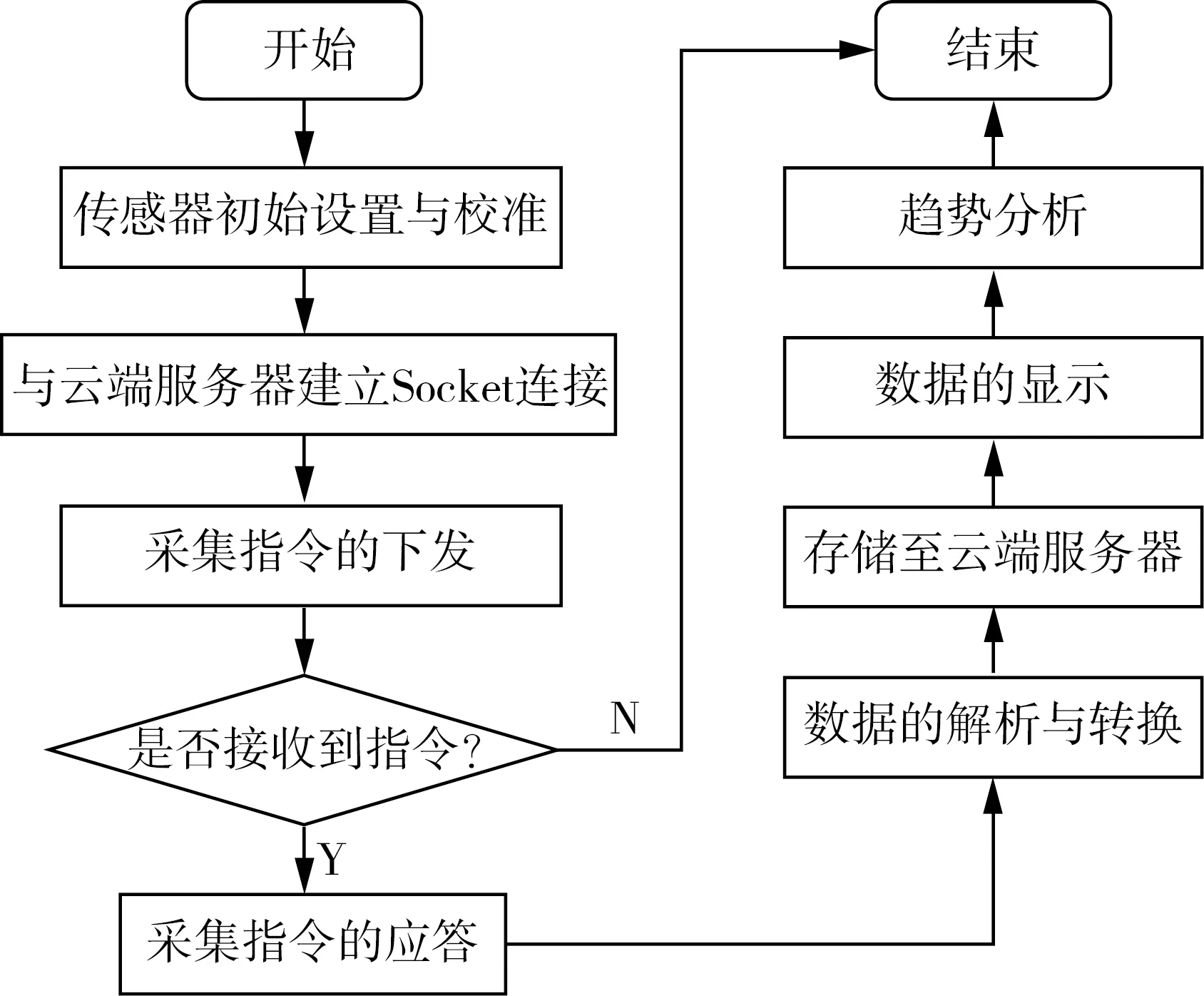
图3 数据采集流程
3 系统测试与分析
本系统于2021年5月19日正式应用于南京农业大学鱼菜共生平台,截止到目前仍平稳运行。通过对设备长时间运行过程中的数据采集成功率进行分析测试,验证其所获得信息的连续性、有效性。
3.1 数据采集成功率
数据采集的过程中,一次完整的通信是从云端服务器向下端传感器发送数据读取指令,经过中间的网络传输,GPRS DTU模块的指令转发,传感器收到指令后向上应答,最终到达系统服务器的过程。云端服务器每5 min 向下发送数据读取指令,在2021年7月1—28日期间,以7天为一个采集周期,通过云端定时下发采集指令,一个周期内应采集2 016组数据,实际采集数据量如表2所示,数据采集成功率平均约为99.53%。
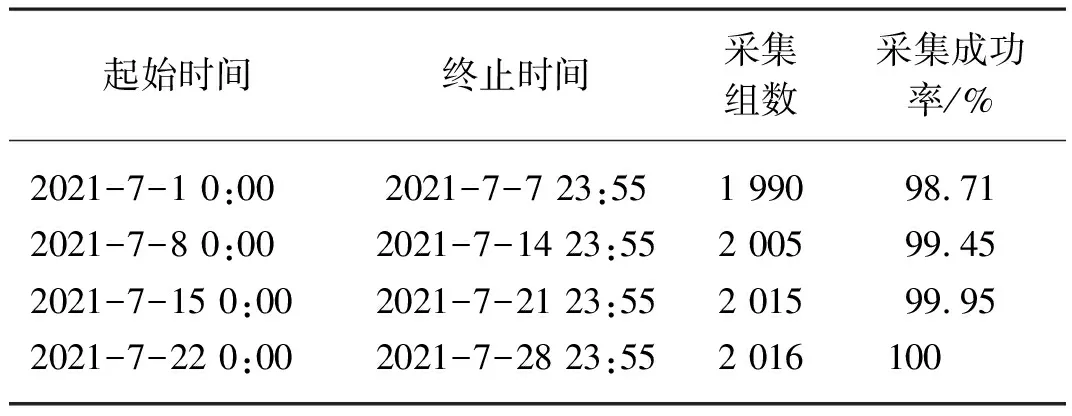
表2 数据采集成功率Tab. 2 Data acquisition success rate
3.2 环境监测结果
将采集的数据从云端的数据库导出,通过绘制的折线图探究一定时间内相关参数的变化趋势。水温、pH值、溶解氧、离子氨浓度变化分别如图4~图6所示,各项指标均在一定范围内动态变化。其中pH值的变化区间在7.42~7.77之间,溶解氧的变化范围在6.04~7.08 mg/L之间,根据《渔业水质标准》(GB 11607—1989)规定,渔业水质淡水pH值应在6.5~8.5,溶解氧在连续的24小时中应有16个小时以上大于5 mg/L,该两项指标数值区间均在合理范围内。

图4 水温

图5 pH值
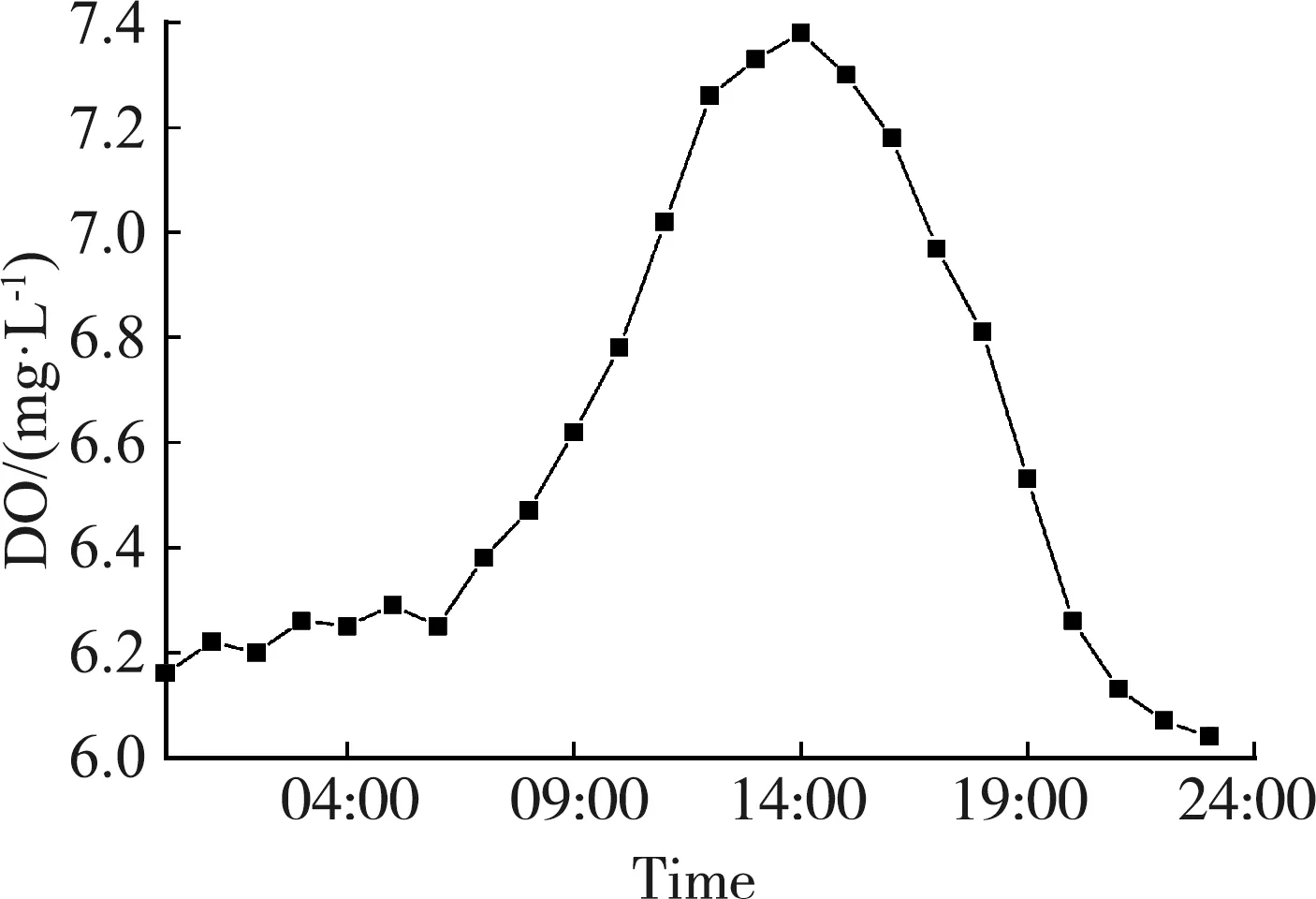
图6 溶解氧浓度
3.3 非离子氨浓度计算
非离子氨的浓度无法测量,需要根据非离子氨浓度百分比、离子氨浓度或氨氮浓度计算得出。非离子氨浓度百分比可以通过查表法或者采用公式直接计算非离子氨浓度[28-29]。
(1)
pKa=0.090 18+2 729.92/T
(2)
CTAN=CNH3+CNH4+
(3)
T=273+t
(4)
式中:CTAN——总氨氮浓度,mg/L;
CNH3——非离子氨浓度,mg/L;
CNH4+——离子氨浓度,mg/L;
pKa——酸离解常数;
T——开氏温度,K;
t——水温,℃。
通过同一时间的水温、pH值与离子氨浓度(图7)计算得出对应的非离子氨浓度,如图8所示。非离子氨的浓度在0.008~0.014 mg/L的范围内变化,满足《渔业水质标准》中规定的0.02 mg/L,处于安全范围内。将所得的离子氨浓度与非离子氨浓度相加得出总氨氮浓度如图9所示。在长期的监测过程中发现在不同的pH、水温条件下,非离子氨浓度的差别也会很大,pH越高,其浓度越高。由于养殖水体的pH、水温一般保持在一定范围内,非离子氨的浓度小于0.02 mg/L,对于总氨氮的浓度也可用离子氨浓度间接估算。

图7 离子氨浓度
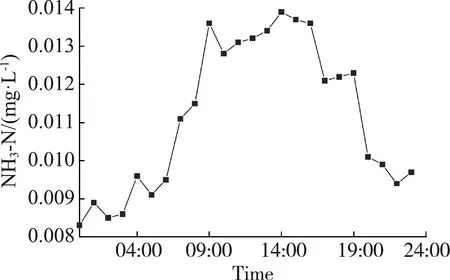
图8 非离子氨浓度
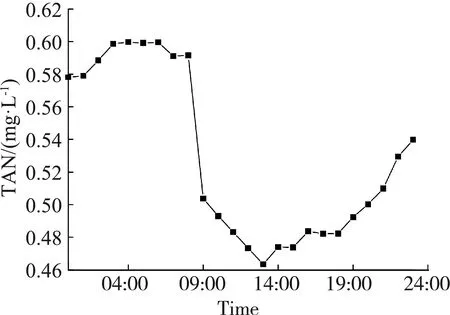
图9 总氨氮
3.4 云平台实现
本文依托有人云开发了图10、图11所示的移动端监控页面与PC端监控页面,实现了数据接收存储、数据显示、数据历史查询、远程控制、视频监控的功能。
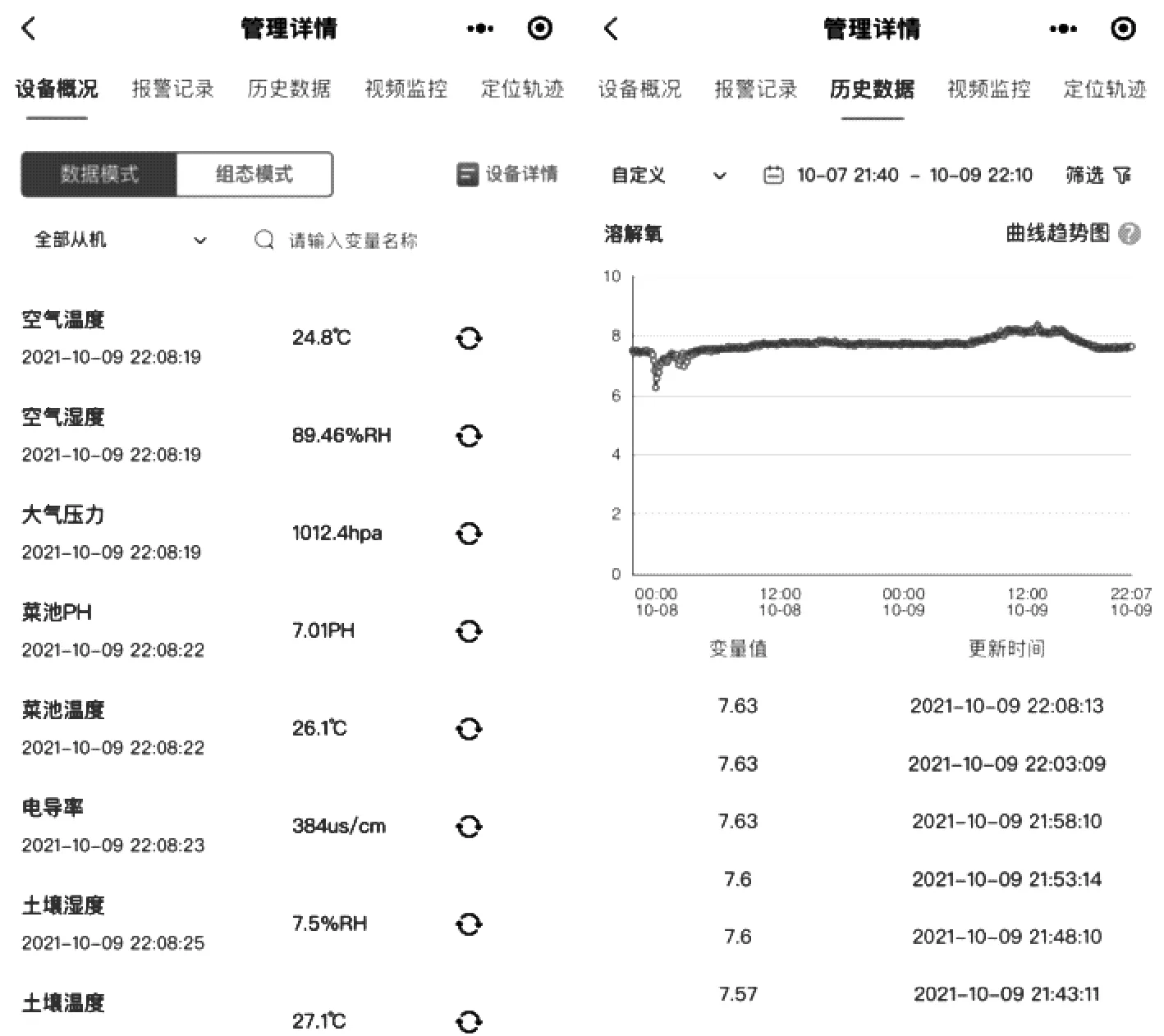
图10 移动端监控页面

图11 PC端监控页面
4 离子氨浓度多元拟合
在养殖水体中,离子氨和非离子氨两者之间会相互转化,其转化速率受溶解氧、pH值、温度等变量的影响[30],在一定程度上可以通过其他易获取的变量建立离子氨的多元线性预测模型,对一定时间内的离子氨浓度进行间接监测,从而进行预警调控,保证养殖水体安全。
在进行正式采集之前,首先通过1 mg/L与10 mg/L的NH4NO3标准溶液对传感器进行校准,标准溶液pH值为7,储存在5 ℃条件下,此时非离子氨浓度可以忽略不计。在6月24日—7月2日采集了2 592组环境数据,划分成1 h时间间隔的时间序列之后进行归一化处理,通过对各个变量之间进行相关性分析,验证拟合的可行性,选取最为相关的几个变量,将前7天的数据作为训练集通过多元线性回归[31]的方法对离子氨浓度进行拟合并且将后2天的数据作为测试集验证预测性能。
4.1 归一化处理
每个环境变量的量纲不同,在进行拟合之前将所有自变量环境参数进行归一化处理。归一化是一种简化计算的方式,通过式(5)将有量纲的表达式,经过变换,化为无量纲的表达式,成为纯量,归一化之后所有数值的范围在[0,1]之间。
(5)
式中:Xmax——环境参数的最大值;
Xmin——环境参数的最小值。
4.2 相关性分析
通过对所采集的数据集中的5个水质参数之间的相关性进行分析,计算不同变量与离子氨浓度之间的皮尔逊相关性,度量两个变量的线性相关,选择合适的自变量进行离子氨浓度的拟合。皮尔逊相关性计算公式如式(6)所示。
(6)
式中:n——样本数量;
Xi——环境参数1的真实值;
Yi——环境参数2的真实值;
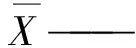

最终各个变量的相关性计算结果如表3所示,电导率、pH值与离子氨浓度具有较强的相关性,溶解氧浓度与离子氨浓度具有一定的相关性,水温与离子氨浓度的相关性较弱。
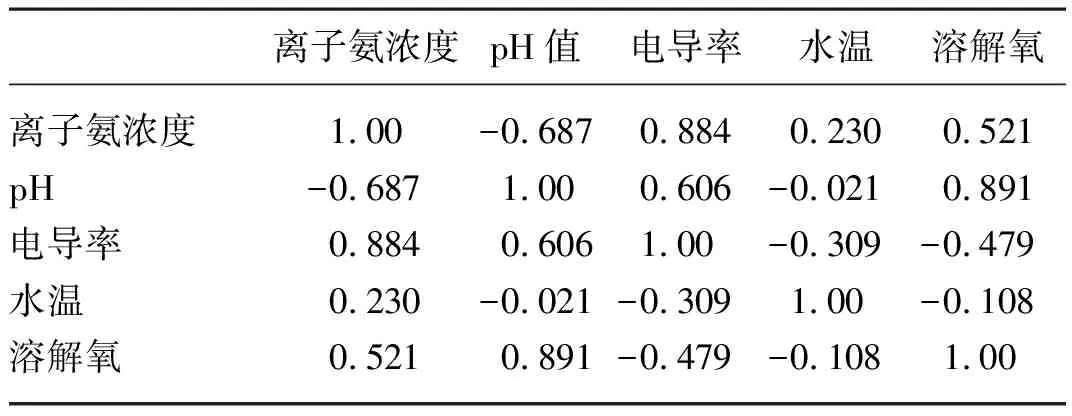
表3 变量相关性Tab. 3 Variable correlation
4.3 多元线性回归建模
通过式(7)计算不同自变量组合建立的多元线性回归模型的确定系数R2。R2是回归直线对观测值的拟合程度,R2最大值为1。R2的值越接近1,说明回归直线对观测值的拟合程度越好;反之,R2的值越小,说明回归直线对观测值的拟合程度越差。R2衡量的是回归方程整体的拟合度,是表达因变量与所有自变量之间的总体关系。
(7)
式中:fi——离子氨浓度预测值,mg/L;
yi——离子氨浓度测量值,mg/L;
由表4可知,单变量情况下选择pH值、电导率建立的模型确定系数R2分别为0.472、0.781;选择电导率、pH值共同建立的模型的确定系数有了一定的提升,确定系数R2为0.817;在考虑溶解氧、温度等变量进行多元线性回归后,得到的模型的确定系数提升不大。因此,考虑选取的自变量个数与拟合结果,电导率、pH值建立的多元线性回归模型最佳,最终得到线性回归模型系数如表5所示。
表4 不同模型下的确定系数Tab. 4 Determination coefficient under different models
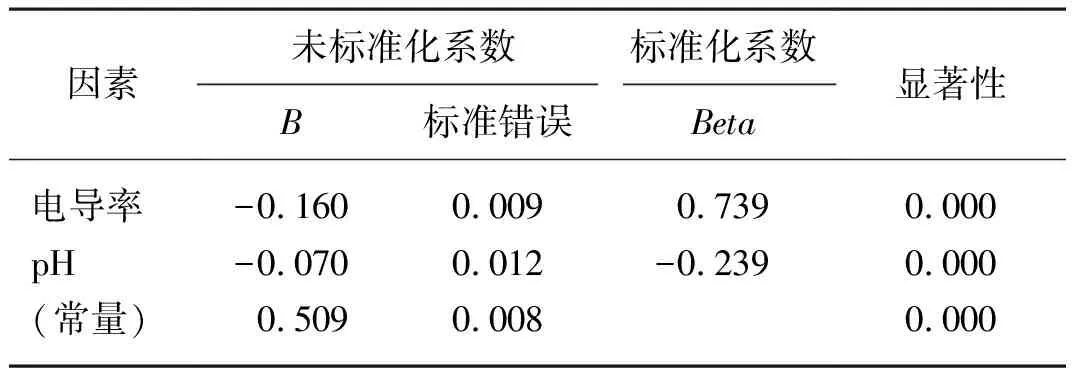
表5 回归模型系数Tab. 5 Regression model coefficient
设归一化之后的电导率为x1,pH值为x2,离子氨浓度为y。则多元线性回归模型方程可表示为
y=0.016x1-0.070x2+0.509
该模型的R2=0.817,通过测试集代入回归方程中计算离子氨浓度48 h内的预测值如图12所示,根据式(8)所得的平均绝对百分比误差MAPE为4.68%,表明预测效果良好,可以看出环境中的电导率、pH值与离子氨浓度的变化有较大的相关性。
(8)

图12 预测值与真实值的比较
5 结论
1) 本文基于GPRS无线网络研发了鱼菜共生多参数环境监测系统。系统实现了对鱼菜共生系统的环境信息获取以及对执行机构的远程控制,并且通过云平台实现数据接收存储、数据显示、数据历史查询、远程控制等功能。通过长期监测,对鱼菜共生系统内的环境数据采集成功率约为99.53%,可以实现对系统环境参数变化趋势的分析研究,为鱼菜共生系统的环境调控策略提供数据支持,通过多种数据的获取可以及时分析养殖水体的氨氮组成情况进而判断水质安全。
2) 对于目前水质监测中使用的氨氮传感器在长时间的使用之后产生一定的测量误差问题,分析各个变量之间的相关性,通过多元线性回归的方法,建立了离子氨浓度的预测模型,确定系数R2为0.817,预测值与真实值平均绝对百分比误差MAPE为4.68%,在短期内实现了较好的预测性能,为离子氨浓度的间接监测提供支持。
3) 本文设计的环境监测系统可以实现对鱼菜共生系统环境的实时、长期监测,为系统提出智能化、科学化的决策提供数据支撑,对实现环境的最优控制,促进鱼菜共生系统性能的提升具有重要意义。
猜你喜欢
当代水产(2022年8期)2022-09-20
今日农业(2021年17期)2021-10-14
科技视界(2021年21期)2021-08-24
今日农业(2021年9期)2021-07-28
海洋通报(2021年2期)2021-07-22
小学生作文(低年级适用)(2020年10期)2020-11-10
中国建筑装饰装修(2020年6期)2020-07-10
科学与信息化(2020年11期)2020-06-19
福建基础教育研究(2019年2期)2019-09-10
蔬菜(2019年6期)2019-06-19
