
基于Matlab的反舰导弹雷达导引头动态工作过程仿真∗
2022-12-01 03:40:44张军涛李尚生刘晨飞
舰船电子工程 2022年3期
张军涛 李尚生 刘晨飞 王 健
(1.海军航空大学 烟台 264001)(2.中国人民解放军92407部队 烟台 264001)
1 引言
在现代高技术战争中,以导弹为代表的精确制导武器占有着重要地位[1]。雷达导引头是导弹的关键装置,具有对指定区域内的目标搜索、检测、识别与跟踪的功能[2]。为评估反舰导弹的作战效能和优化其系统设计,需要对雷达导引头的动态工作过程进行分析[3]。雷达导引头的实物测试和靶场实验效率较低且费用较高,而采用仿真试验对雷达导引头的动态工作过程进行研究,具有成本低,可重复性的特点,是实现反舰导弹作战效能评估的主要途径[4~5]。
目前雷达导引头动态工作过程仿真研究集中于功能单元模块建模、搜索与跟踪建模、动态工作过程建模等方面。首先,根据雷达导引头的工作原理,对雷达导引头的功能模块建模是雷达导引头动态工作过程仿真的基础,文献[6]对天线、环境、接收机、信号处理、数据处理等功能模块进行了建模仿真。文献[7]介绍了雷达导引头的发射和接收信号模型、信号处理模型、杂波和干扰模型并进行了仿真研究。其次,雷达导引头对目标的探测、搜索与跟踪是导弹完成作战任务的重要环节,文献[8]对雷达导引头进行了多粒度的仿真,介绍了目标检测模块和测量模块,建立了跟踪数学模型并进行了仿真。最后,对动态工作过程的建模,就是让雷达各单元在统一的时序信号下进行联动,计算各时刻下雷达导引头各单元的工作状态,实现雷达导引头搜索、检测、识别、跟踪的动态工作过程仿真[9~10]。
基于此,本文确立了先功能模块建模再实现雷达导引头动态工作过程仿真,以典型主动雷达导引头为对象,分析其工作原理并建立相应的数学模型,实现对雷达导引头工作过程动态仿真。
2 雷达导引头动态工作过程建模
2.1 雷达功能单元的建模
本文以单平面、单脉冲主动雷达导引头为研究对象,其原理框图如图1。雷达导引头包含的功能模块有天线及伺服系统模块、发射机模块、接收机模块、信号处理机模块等[11~12]。
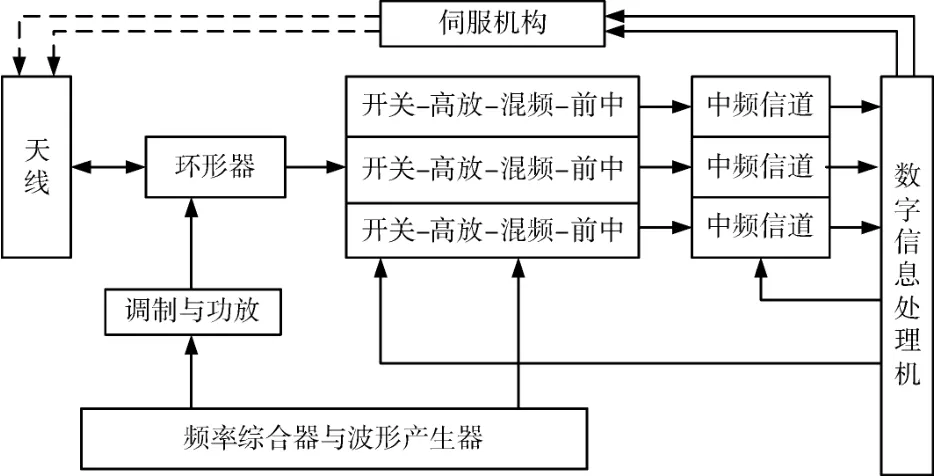
图1 脉冲压缩主动雷达导引头简化原理框图
2.1.1 天线及伺服系统
雷达导引头通过天线来发射或接收电磁波,仿真的天线方向图函数为辛格函数,方向图函数如下式所示:
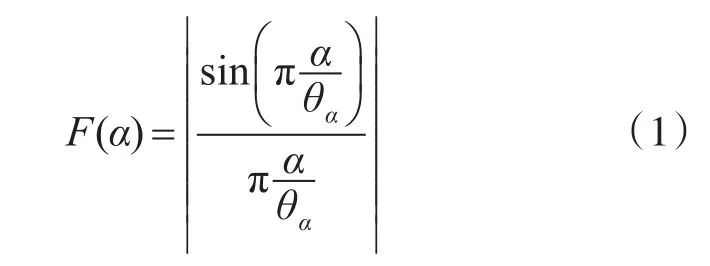
式中,α为目标与天线中心的方位偏差,θα为天线的方位波束宽度。
天线伺服机构通过驱动天线运动,控制天线的方位扫描的范围和扫描速度,则天线扫描速度为

式中,θscan为天线扫描范围,T为天线扫描周期。
2.1.2 发射机建模
雷达导引头通过向特定区域发射电磁波,接收目标处反射回来的电磁波并进行处理,从而实现搜索与跟踪功能。本文以线性调频信号作为发射脉冲信号,模型如下:
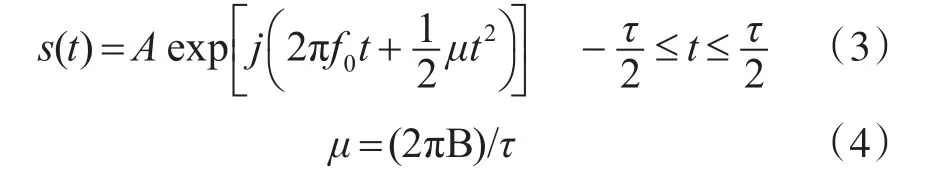
式中,A为信号的幅度,f0为信号的载频,μ为调频斜率,B为信号带宽,τ为脉宽。
对线性调频信号进行幅度和频率上的调制,得到雷达导引头的发射信号:

式中,Pt为发射机峰值功率,Lt为发射综合损耗,gvt(θ)为目标在雷达天线方向上的增益,ωc为载频,v(t)为相参脉冲串。
2.1.3 接收机建模
雷达接收机的主要功能是将天线接收到的回波信号进行放大并变成视频脉冲以及角误差信号,再分别将其送到距离、方位跟踪系统以及导弹的控制回路,实现雷达对目标的自动截获与跟踪。由雷达方程可知,雷达导引头接收的目标回波信号模型为

式中,Ls为雷达发射、接收的综合损耗;gvt(θ)、gvr(θ)分别为目标在雷达天线发射和接收方向上的增益;R为弹目距离;λ为雷达波长;σ为目标RCS;ωd为多普勒频率,ωd=2vωc/C,v为目标在雷达方向上的径向速度,C为光速;Rk为第k个脉冲与目标相遇时的弹目距离;Tr为脉冲重复周期;Tp为脉冲宽度。
2.1.4 信号处理机建模
信号处理就是将目标回波从噪声、杂波以及干扰背景中提取出来,并获得目标的距离、速度、角度等信息参数,形成制导指令引导导弹飞行,进而实现对目标的跟踪和打击任务。雷达导引头的信号处理机一般采用脉冲压缩、动目标显示、动目标检测与恒虚警检测等技术。
雷达导引头通过采用脉冲压缩技术,既可以实现探测距离和距离分辨率的提高,同时也能得到最大的信噪比。则经过脉冲压缩后的输出信号So(t)如下:
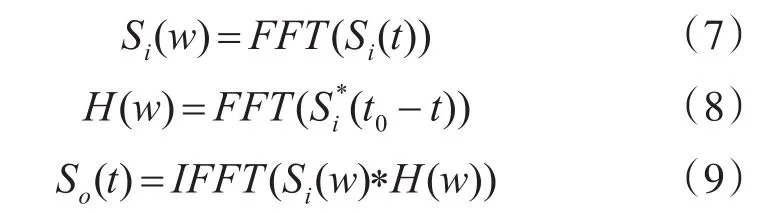
式中,Si(t)表示输入信号;Si(w)表示输入信号的频域响应;H(w)表示匹配滤波器的频域响应动目标显示和动目标检测技术的理论基础都是多普勒效应,实现抑制杂波信号,提取目标回波信号的技术,动目标检测技术可看做是动目标显示技术叠加多普勒滤波器组,其输入信号是经过脉冲压缩处理的回波信号。
恒虚警检测能够进一步抑制杂波从而提取目标回波,应用恒虚警技术在对回波信号进行检测时,检测门限值能够根据信号幅度变化来调整,雷达导引头一般采用单元平均选大的方式来计算门限值,从而保证虚警率稳定不变。
2.2 雷达导引头搜索和跟踪建模
2.2.1 方位搜索
末制导雷达根据方位和距离确定的扫描边界范围,从当前波束指向的位置搜索一个周期。如果没有搜索到目标,则改变搜索参数继续搜索。根据雷达导引头波束宽度、当前的电磁波指向、发射脉冲的起始位置和脉冲宽度来模拟产生电磁脉冲,则当前波束指向的波束上下界如图2。

图2 雷达导引头搜索波束示意图
式中,θscan为天线扫描范围,T为天线扫描周期。式中,θdown为当前波束指向的下界,θup为当前波束指向的上界,θcur为当前波束指向,θ3dB为雷达导引头半功率波束宽度。
2.2.2 距离搜索
雷达导引头在进行方位搜索的同时,控制距离门在当前波束指向由远及近进行距离搜索,“距离选通波门”控制接收机的开关,随着“距离选通波门”移动,当有目标在“距离选通波门”内时,接收机接收目标回波,其余时间接收机处于关闭状态,如图3所示。
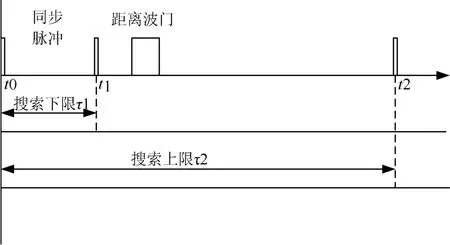
图3 距离搜索简要框图
式中,α为目标与天线中心的方位偏差,θα为天线的方位波束宽度。
天线伺服机构通过驱动天线运动,控制天线的方位扫描的范围和扫描速度,则天线扫描速度为

式中,θscan为天线扫描范围,T为天线扫描周期。
2.2.3 方位跟踪
雷达导引头完成对搜索区域的搜索后,按照捕捉准则,根据目标的参数,对捕获的目标进行跟踪。目标回波信号经过和差器输出一路和信号和一路差信号。和、差两路信号与本振信号混频后形成两个中频信号,和路中频信号经过中频接收机处理输出视频脉冲,反映目标的大小和距离;而差路中频信号经过中频接收机输出角误差电压信号,表示目标的方位误差,从而实现在方位和距离上对目标进行跟踪。
根据比幅单脉冲跟踪方法,建立仿真模型。根据天线方向图函数构造和、差波束和角误差电压。
式中,φ0为目标偏角。
2.2.4 距离跟踪
距离跟踪是通过对运动目标的距离连续不断的测量,使距离跟踪波门根据距离的变化来调整,从而在距离上锁定目标,通过分裂波门法来实现这一过程。末制导雷达距离跟踪系统简要框图如图4所示,控制级、时间调制器和波门、半波门形成级在误差电压的作用下,使选通波门中心向对准回波脉冲中心的方向移动,完成距离自动跟踪系统的闭环,当目标运动时,选通波门中心即可始终对准回波脉冲中心。
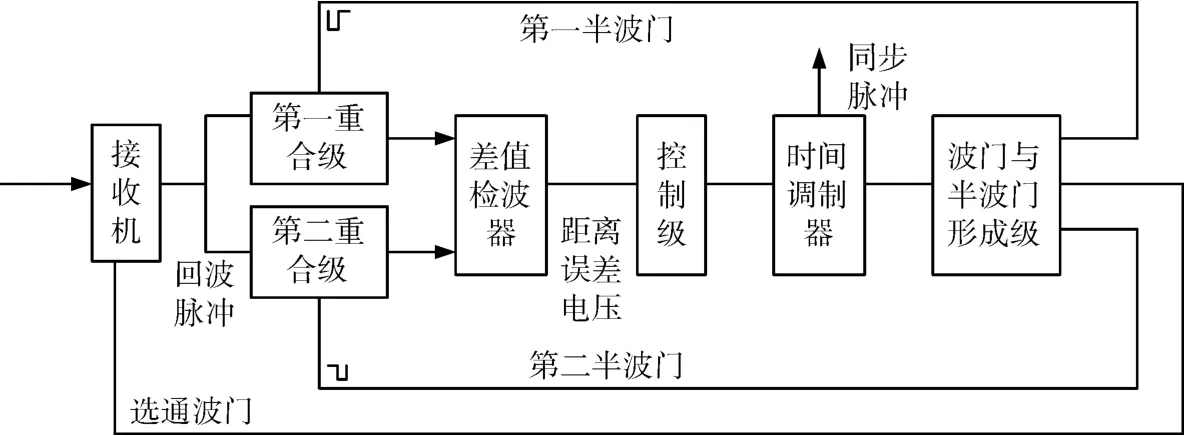
图4 距离跟踪系统简要框图
3 仿真模型
通过建立的雷达导引头功能模块模型和搜索跟踪模型,使雷达各单元在同一时刻进行联动来实现导引头的动态工作过程仿真。
首先进行目标的参数设定:设置目标数为3。
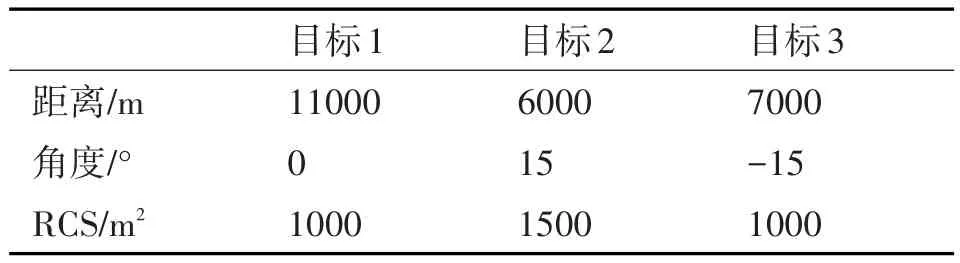
表1 目标参数
仿真假设目标的RCS不变,目标的距离、角度、天线方向图系数以及目标散射功率等随雷达运动与天线扫描位置的变化做相应的变化。雷达导引头的角度扫描范围为45°;距离搜索范围近界为3000m;距离搜索范围远界为20000m;最小跟踪距离为300m;搜索波门宽度为50m;跟踪波门宽度150m;天线扫描周期为4s;波门扫描速度为500 μs/s;天线的3dB波束宽度为9°;导弹飞行速度为300m/s。
在检测过程中,随着天线的转动,天线电轴与目标之间的夹角在不断变化,同时天线的方向图指向也在不断地变化。与此同时,距离波门在距离扫描范围内进行扫描。当目标进入检测窗口时,如果发现的新目标不是上一个目标,则增加一个发现目标数,若为同一个目标,则保持现状。通过计算目标进出波门距离得到目标的距离信息,通过距离、角度、回波功率的关联处理获得目标的角度信息。
当雷达按照预先设定的捕捉准则成功的捕捉到目标并准确的跟踪目标时,天线波束对准目标,此时天线电轴与目标之间的夹角为零,当跟踪距离到达5km时,改变波束显示范围;而此时距离波门则扩展为搜索时宽度的3倍开始距离跟踪,始终保持回波处于波门中心位置,且根据当前的距离波门调整步长,使波门速度与弹目相对速度相匹配,当跟踪到雷达最小跟踪距离时,方位跟踪系统以及距离跟踪系统停止工作。
图5为雷达方位-距离扫描动态仿真过程中的一个截图,在方位-距离扫描过程中,当有目标被发现时,即目标落入波束范围内和距离选通波门内时,雷达根据预先设置的目标检测参数判断目标信息,当发现的目标为新目标时则对目标进行标记,若发现的目标为已标记过的目标则保持原状态继续搜索。
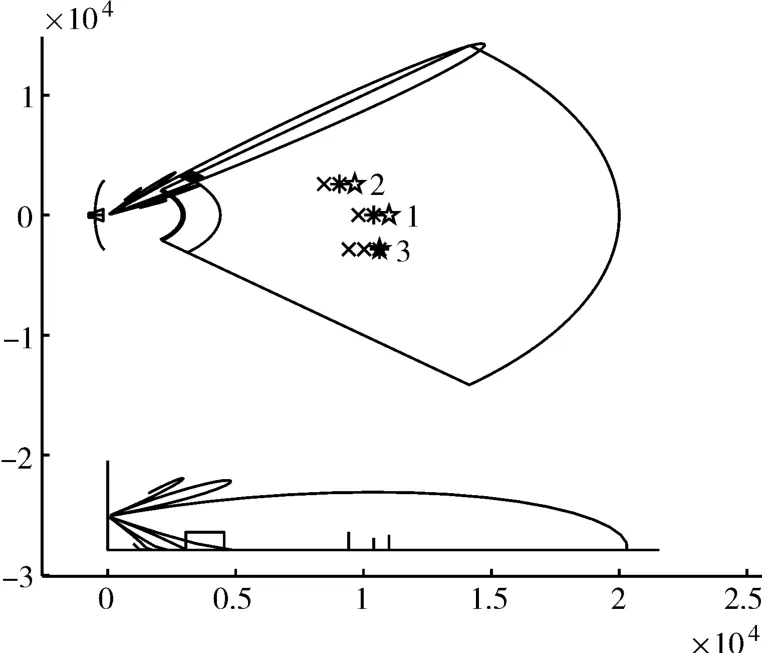
图5 雷达方位-距离搜索仿真图
图6为雷达方位-距离跟踪动态仿真过程中的一个截图,在目标跟踪时,雷达首先根据预先装订的截获准则(如远中近、大中小)截获目标,本次仿真设定截获大目标,仿真时雷达截获目标2。在跟踪时,天线波束始终对准跟踪的目标并且实时显示弹目距离,而距离波门始终保持目标处于波门中心位置。
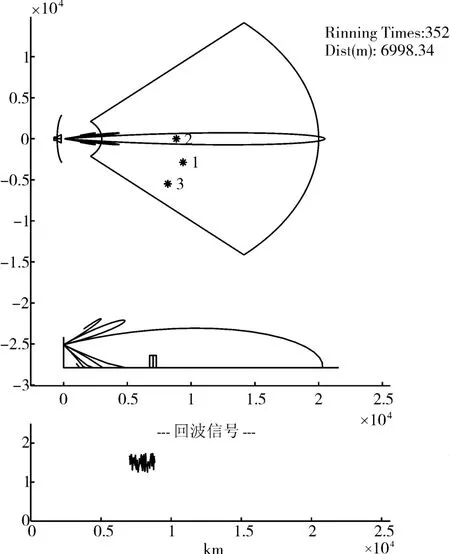
图6 雷达方位-距离跟踪仿真图
4 结语
本文对单脉冲、单平面体制主动雷达导引头进行建模仿真研究,首先分析雷达导引头的工作原理,对雷达导引头的功能模块建模。然后对雷达导引头的检测、识别、搜索、跟踪过程进行分析,设定检测原则,建立方位-距离搜索模型,方位-距离跟踪模型。最后使雷达各单元在同一时刻进行联动,实现导引头的动态工作过程仿真。需要指出的是,本文很多模型进行了简化,如目标的RCS在弹目相对运动过程中保持不变,对于目标RCS的变化还有待进一步研究;未能从信号级对雷达导引头的信号发射、接收、处理、检测、跟踪进行仿真。因此下一步完善目标散射点模型、运动模型、干扰和杂波模型以及信号的传输模型,实现对抗条件下的雷达导引头动态过程仿真。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:34
幼儿园(2021年12期)2021-11-06 05:10:20
科学与信息化(2021年5期)2021-03-19 01:09:24
无线电工程(2020年11期)2020-10-28 07:12:24
计算机应用与软件(2020年8期)2020-09-02 01:33:56
制导与引信(2016年3期)2016-03-20 16:01:58
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
火控雷达技术(2016年1期)2016-02-06 02:18:01
