公路高边坡稳定性监测中免棱镜全站仪的应用
2022-11-29 10:57关辉
交通世界 2022年29期
关辉
(邯郸市交通建设投资管理中心,河北 邯郸 056000)
1 工程概况
某高速公路A1标设计交桩控制点J26-J27段属于深挖路堑,而由深挖路堑形成的落差达到20m的高陡边坡很容易导致滑坡、崩塌、倾倒等常见病害的发生。为了保证作业人员的安全及施工的顺利进行,需要对设计交桩控制点J26-J27段高边坡稳定性进行监测。而高边坡的稳定性评价指标是指边坡结构某点或某区域位移是否发生突变,因此,需要对高边坡表面位移进行整体监测,以确认高边坡是否处于稳定状态。由于此段高边坡具有坡度陡、土体不稳定的情况,所以宜采用免棱镜全站仪进行边坡稳定性监测,经过一个月的实地监测及数据分析,最后得到此段高边坡的位移状态,为高边坡的防护施工提供科学的基础数据。
2 监测网的布设
J26-J27段高边坡布设的位移监测网主要包括控制点、施测点、监测点3个组成部分,分别在公路高边坡的坡脚、中部及坡顶等位置按编号测点1到测点12布设了12个位移监测点,从而能够更准确地测定高边坡的变形情况。具体布置方案见图1和图2。
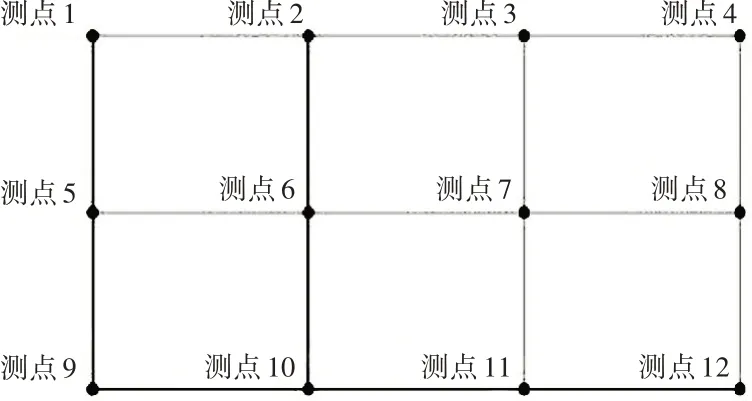
图1 高边坡监测点布设立面
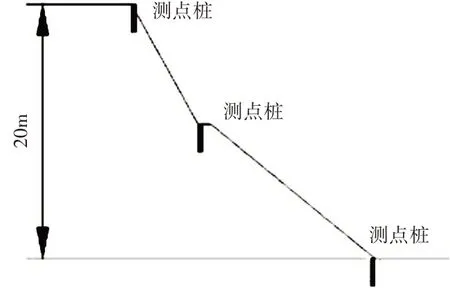
图2 高边坡监测点布设断面
监测点布设完成后,以设计交桩控制点J26、J27为基准点,并在高边坡沿线路基外土质稳定处依次设置4个控制点,建立起监测控制网。采取以交桩控制点J26~J27为基准点且设置控制点密度较高的原因在于,若在施工中部分控制点损毁,也可采用其他控制点进行补位实测,既不会对监测产生大的影响,也能保证监测结果的精度,同时也能用于公路项目的其他测量工作,保证现场施工的顺利进行。并且要不定时对控制网进行复测核验,检查控制点位是否发生移动及沉降,以确保高边坡位移监测结果准确。
3 仪器的检定及精度核验
3.1 仪器的检定维修
由于经常在野外使用及在运输途中的振动和缺乏保养措施,全站仪的结构发生变化、电子元器件的自然老化等,会导致仪器性能发生变化。为了全面掌握仪器的性能,提高仪器测量精度,仪器在使用过程中必须定期进行检定。由于免棱镜全站仪是精密电子仪器,所以在使用过程中如出现问题或故障不要随意拆卸和调整,应到具有仪器鉴定资质的机构进行检定和维修。我国计量检定相关规程规定,全站仪的检定周期不能超过1年。
3.2 仪器的精度核验
该次实测所采用的仪器是拓普康MS05全站仪,属于超精密三维自动化测量的新型测量机器人。拓普康MS05全站仪的EDM在免棱镜的情况下为3R级激光测量,它的测角精度达到0.5″,测距使用的是共轴相位比较测量系统,其精度可达到亚毫米级。在使用反射片时测量精度可达到±(0.5+1×10-6D)mm;在使用AP/CP棱镜情况下的测量精度可达到(0.8+1×10-6D)mm;在使用免棱镜的情况下的测量精度最高可达到(1+1×10-6D)mm。在经过多次测试后,拓普康MS05全站仪的各项指标都符合规范要求。
全站仪的测角、测距标称精度符合表1的规定;高边坡地表水平位移监测基准网和监测点精度符合表2的要求;高边坡地表垂直位移监测基准网和监测点精度符合表3的要求。
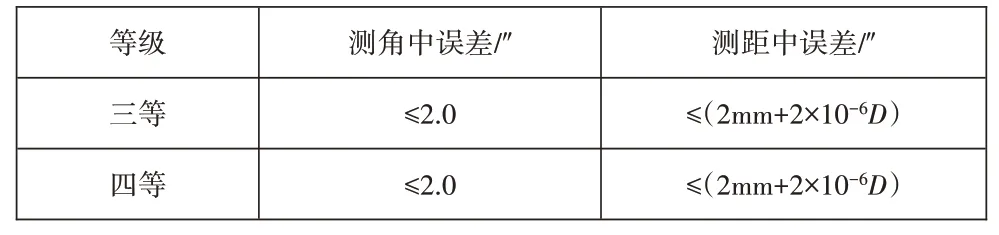
表1 全站仪测角、测距标称精度要求
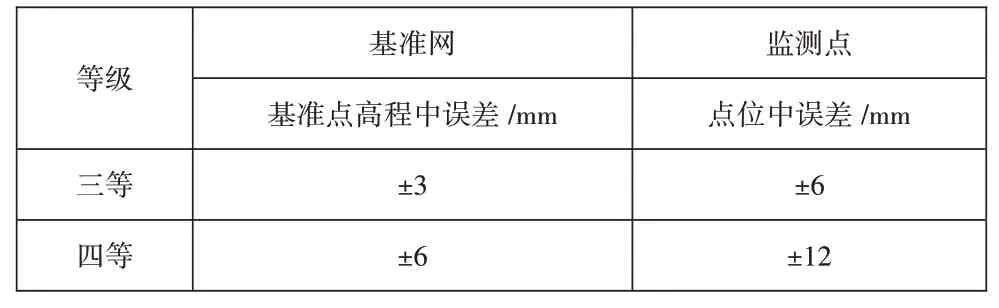
表2 高边坡地表水平位移监测基准网和监测点精度
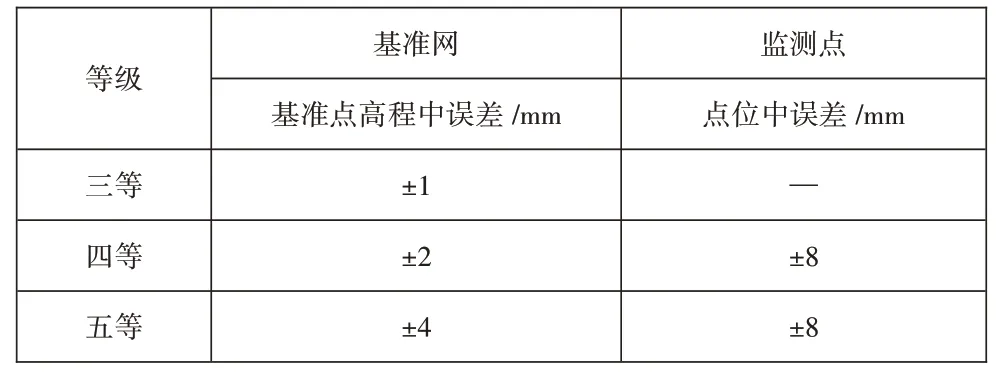
表3 高边坡地表垂直位移监测基准网和监测点精度
4 监测点的观测
4.1 观测前的准备工作
在进行高边坡位移监测前必须全面地了解并掌握高边坡防护工程的整体状况和整个工程项目施工要求。在进行实测前需要编制高边坡位移监测专项进度计划,以指导监测项目按计划实施。并且在实施过程中经常检查实际监测进度是否按计划要求进行,对出现的偏差分析原因,采取补救措施或调整,直到监测工作最终完成。
4.2 监测实施方案
水平及垂直位移的监测原理主要是通过观测角度、边长等求得监测点的平面坐标及高程,将若干次所测得的平面坐标及高程进行对比,得出监测点的水平及垂直位移量。目前常用的监测方法有基准线法、交会测量法、三角网测量法、紧密导线网法等。除了这些方法外,还有专用测量法、摄影测量法和RTK测量法等。
在对监测点进行观测之前,要检验各监测点及工作点的稳定性,检验的结果符合要求后可以进行观测。在观测的过程中,每个监测点进行两个回合,并且要保证每个测回进行三次的读数,如果三次观测所产生的误差小于2mm,则选择其算术平均值。
最后,采用监测全时段三维坐标来反映所有监测点的变化状态,根据所使用的测量方法、观测仪器及监测项目的特点,如果某一侧的多数监测点的三维坐标差均大于预警值,如表4所示,能够看出一定的变化规律,则预示着边坡存在不稳定的趋势,应针对这种情况采取针对性的措施。
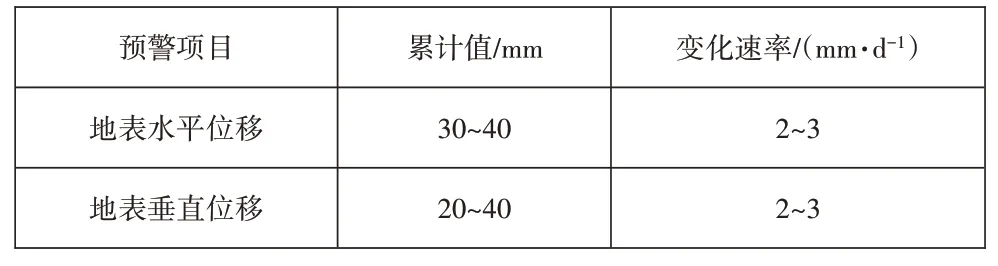
表4 边坡监测预警项目及预警值
4.3 注意事项
观测尽量选择在白天,且光线比较好的时段,在光线好的情况下更能清晰地找准监测点,测出来的数据比较准确;该监测项目的相关负责人,必须确保随时互相沟通及交换意见,以防出现异常情况;负责监测及现场的施工各方要保护好监测点,提前对监测点及控制点做好加固措施,并设置醒目的防损坏标志,防止出现人为破坏;在进行观测时必须保证监测点标号的一致性,以防出现记录混乱而导致错误;观测时的仪器操作要符合规范要求,避免不规范的操作对仪器造成损坏,同时要注意现场施工情况,保证监测过程中相关测量人员的安全。
5 监测数据的内业处理
根据监测数据的处理方式,将此次高边坡位移监测所得的数据进行处理,表5为第一次(即监测点基准值)和最后一次的监测结果。
根据表5第一次和最后一次对高边坡位移的监测数据得知,各监测点的三维坐标差值都在规定的预警值之内,且不存在明显规律性的移动情况,项目各分部分项工程可正常施工。但是只有一个月的监测周期,只能在这段周期内为施工提供一定的基础数据,还无法最终判断高边坡最终的位移情况,仍然需要进行多次和多种情况下的监测,如在海南常见的大暴雨、台风等极端天气出现过后的监测情况,才能对高边坡的位移情况获得更加合理的判断。
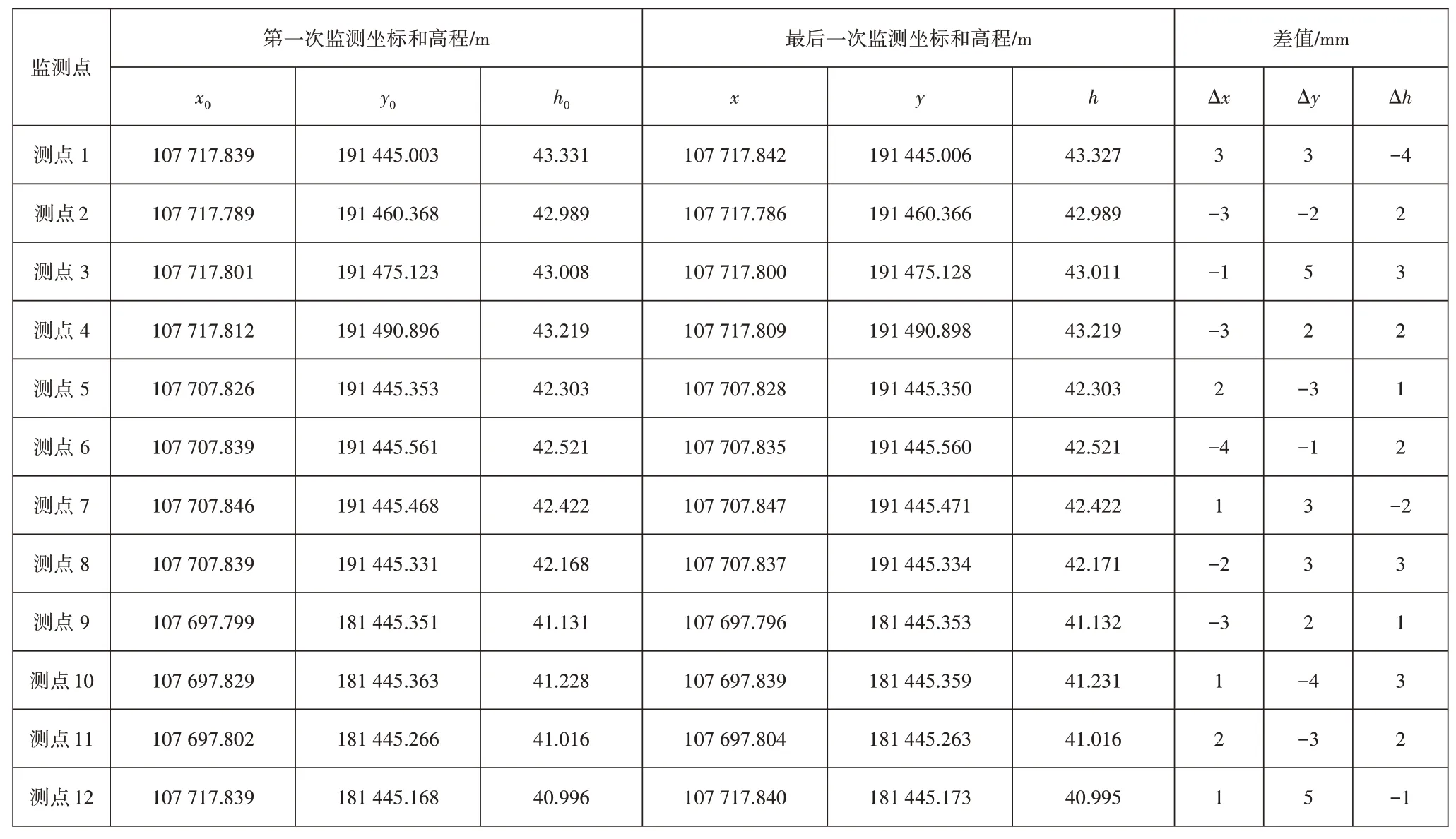
表5 高边坡位移监测第一次和最后一次的监测结果
6 结语
本文通过工程实例对免棱镜全站仪在公路工程高边坡位移监测中的应用进行分析及论证,验证了其可靠性。相较于有棱镜全站仪,其优点在于不需要在监测点上安置棱镜即可完成测量。在满足监测精度要求的前提下,既节约了人力成本,而且还大幅度提高了工作效率,具有可推广性与可使用性。
猜你喜欢
法律方法(2022年2期)2022-10-20
全球定位系统(2022年1期)2022-04-14
科技信息·学术版(2022年3期)2022-02-21
全球定位系统(2021年1期)2021-03-26
思维与智慧·下半月(2021年3期)2021-03-25
学苑创造·A版(2019年4期)2019-05-10
商情(2017年38期)2017-11-28
三联生活周刊(2017年37期)2017-09-11
居业(2017年5期)2017-07-24
现代职业教育·中职中专(2016年4期)2016-10-21