
多AUV 水下协作搜索研究现状与展望
2022-11-24 03:31朱大奇任科蒙
上海理工大学学报 2022年5期
朱大奇, 庞 文, 任科蒙
(1. 上海理工大学 机械工程学院,上海 200093;2. 上海海事大学 物流工程学院,上海 201306)
深海水下目标搜索既是水下机器人(unmanned underwater vehicle,UUV)的重要应用领域,也是现代智能信息处理的重要应用领域,是一多学科交叉的高新技术,基于自治水下机器人(autonomous underwater vehicle,AUV)的深海水下搜救术已成为航运与海洋工程领域的研究热点。相比于地面与空中智能搜索,由于水下环境的复杂多变,以及AUV 自身与水下感知传感器的约束,使得“多AUV 水下协作搜索控制研究”成为一个极具挑战性的研究领域。
由于AUV 自带动力,无缆自治,掩蔽性能好,搜索范围广,无论在民用海洋领域,还是在海防军事领域都有着十分广泛的应用前景,特别是深海水下搜索领域,AUV 几乎是其唯一的选择。早在1963 年就有美国“阿尔文”号与“科夫”号水下机器人协作搜寻、打捞出西班牙海沟失落氢弹的成功案例;2014 年初的马航MH370 失联客机印度洋海底大搜索中,美国人动用了“蓝鳍金枪鱼”号AUV 在4 500 m 的深海进行了大规模水下搜索,但在历时多月的搜索中未见国产AUV 身影。
随着AUV 搜索任务复杂性的不断增加, 在单一AUV 难以完成任务的情况下,多AUV 系统已成为水下机器人发展的重要研究方向[1-2]。相比于单一AUV 系统,多AUV 系统能够提供更多的解决方案,具有更高的工作效率,更高的智能水平,更好的容错性能。多AUV 协作搜索是多AUV 系统研究的重要内容,在民用深海搜救和国家海防安全建设上有着重要而不可替代的作用。多AUV 水下协作搜索控制是针对大规模、多地点的可疑深海水域,研究多AUV 群体高效的水下搜索方法。其相关研究不仅牵涉单AUV 水下作业的共性技术,如:水下环境感知技术、水下导航定位技术及水下轨迹跟踪控制技术等,而且更需研究多AUV 水下协作控制的关键核心问题:多AUV多目标水下搜索任务分配技术、AUV 全局点-点路径规划与安全避障技术、具体搜索水域的全覆盖水下搜索路径规划技术等。
1 自治水下机器人协作搜索控制研究现状
图1 为多AUV 多水域搜索场景。首先,需要在综合考虑水下搜索环境、海流大小方向、障碍物与禁止航区、待搜索目标的中心位置等各类因素前提下,将各个待搜索的水域合理分配给各个AUV,即水下搜索任务分配问题。接着需要解决获得任务目标的AUV 全局路径规划问题,即如何规划一条安全最优的路径,使AUV 能快速安全可行地到达待搜索的目标水域。最后,需要实现对目标水域的全覆盖高效搜索的路径规划,并实现对可疑目标物全面搜索。

图1 多AUV 多水域搜索场景Fig.1 Multi-AUV multi-water area search scenario
1.1 多AUV 多目标水下搜索任务分配
早期多机器人系统任务分配大多采用基于行为任务分配策略[3-7],前者主要模仿动物行为进行任务分配。例如:Mataric[5]提出了一种基于动物行为模型的算法,用于控制动物的各种不同的行为,包括分散、聚集等;Parkers[6]提出了一种分布式的,基于行为的软件控制系统;Miyata 等[7]提出了一种控制机器人组按时间的先后顺序,彼此独立执行不同任务的行为算法。以上方法均是通过模仿动物(包括人类)的行为方式,来分配不同的任务。基于行为的任务分配算法直接、简单,几乎没有滞后。但是,这些算法存在的问题是没有自我调节能力,机器人之间协作较少,优化能力弱,效率较低。
任务分配的另一个常见方法是市场机制算法[8-10]。在以市场机制为基础的系统中,多机器人系统视为一个经济体,每个机器人视为一个代理商。例如,Wahl[8]提出的多任务分配的拍卖算法,就是用最少的总消耗换来最大的总体及个人利益。这种算法使每个机器人不断计算和比较访问指定目标点的消耗,以此来平衡交易。尽管算法很好地解决了已知目标数的任务分配,但是对于目标数量未知的情况,市场经济算法不能保证任务分配的最优化。
智能优化任务分配方法是多机器人系统任务分配的一个重要策略,如粒子群算法PSO(particle swarm optimization)、遗传算法GA(genetic algorithm)、蚁群优化算法ACO(ant colony optimization)等[11-13]。它们的共同特点是将搜寻路径的总长度和搜索能耗作为优化计算的目标函数,并通过各类迭代计算寻找最优任务分配解。由于神经网络的竞争特性和自学习能力,近些年来自组织神经网络已被应用于机器人系统的路径规划与任务分配中。自组织神经网络SOM(self-organizing map)算法由Kohonen[14]于20 世纪80 年代提出,该算法主要用于对输入向量进行动态的区域分类,将这种算法应用于多任务分配后,目标点会被自动地归纳、划分,并分配给合适的机器人。2006 年,Zhu 等[15]首次将自组织神经网络应用于多移动机器人系统的任务分配与路径规划中,提出的算法在保证多机器人系统以最少的总消耗遍历所有目标的前提下,每个机器人都能沿着最短路径到达目标。其后, Zhu 等[16]在原有算法的基础上进一步改进,给定移动机器人运行时的最大转向角以及最大转向半径,在完成多任务作业的基础上,控制移动机器人沿着平滑的弧线到达目标点。
上述的研究成果都是针对地面移动机器人的任务分配和路径规划,由于水下环境复杂多变、水下机器人自身的非线性、强耦合与弱感知特性,导致有关水下机器人任务分配研究报道还不多。但随着海洋科技的快速发展,近些年水下机器人任务分配研究已得到广泛关注。2009 年,Chow[17]提出了一个改进后的K-均值算法,用来解决静态海流环境下的多AUV 系统的任务分配问题。这个算法结合了Dubins 模型、AUV 动态模型以及静态海流模型,其中改进后的Dubins 模型使水下机器人在常值海流环境下,沿弧线到达目标。算法的新颖之处在于将多AUV 系统的任务分配与路径规划结合到了一起。但是,该算法存在的问题是:K-均值在完成多任务作业时,对移动的目标物不敏感,算法没有将二维静态海流模型拓展到三维动态海流模型,降低了算法的适用性;另外,对于结合了时变海流和移动目标物的复杂情况,算法没有给出有效的解决方案。
针对K-均值算法的缺点,2013 年,Zhu 等[18-19]首次将自组织神经网络模型SOM 引入水下多AUV 系统,并将速度合成算法和SOM 算法相结合,研究多AUV 系统在三维时变海流环境中静态和动态目标的任务分配与路径规划问题。图2 为该自组织任务分配算法的原理。多AUV 目标搜索中的任务分配是在一个有限的工作区域内将随机分布的一组AUV 分配给所有需要搜索的区域。每个搜索区域都需要分配AUV 对该区域执行未知目标搜索任务。对于每个AUV 而言,其代价是由从起始位置航行到搜索区域所移动的距离来衡量,总代价定义为所有单个AUV 代价的总和。当所有搜索区域都分配有AUV 对其搜索,分配任务完成。

图2 SOM 神经网络任务分配基本原理Fig. 2 Task allocation principle of SOM neural network
SOM 神经网络可以实现输入数据的聚类,将其应用到多AUV 多目标任务自组织分配,主要有两个功能:一是竞争分配功能:将搜索区域的中心坐标作为SOM 输入神经元,执行任务的AUV坐标作为输出神经元的权值,在SOM 神经网络学习竞争过程中,按输入坐标与输出神经元权值的欧式距离最小选出获胜神经元,即把输入的目标分配给距离最小竞争获胜的输出神经元(对应具体获胜AUV);二是获胜AUV 的全局路径规划功能:对获胜神经元权值(对应获取任务的AUV 坐标)不断学习调整,输出神经元(已分配任务的AUV)分别趋向于输入神经元所在的区域,实际场景中就是使其与目标距离不断减小,直至到达目标搜索区域的中心。
该算法不仅能解决三维时变海流环境中多AUV 任务分配和路径规划问题,并对每个AUV的工作量进行了优化均衡,不会出现个别AUV 任务过重导致搜索任务失败的情况。而且,将多AUV任务分配与路径规划合为一体,通过SOM 的权值更新,实现每个AUV 的路径规划与航行。但早期算法都将AUV 看成理想的质点,完全没有考虑AUV 的实际航行条件,任务分配的竞争距离完全按照AUV 与目标坐标的直线距离计算,这与实际的水下目标搜索情况不一样。对此,文献[20]进一步研究了海流环境下AUV 自然曲线航行的SOM 竞争自组织任务分配算法,使该任务分配算法更接近实际应用。
表1 总结了深海水下多AUV 多任务分配算法的研究现状,由表1 可见,以上的多AUV 多任务分配算法都有各自的特性优势与不足,但对多AUV水下任务分配研究来说,仍然有两个重要问题没有解决[21-22]:

表1 深海水下多AUV 多任务分配算法研究现状Tab.1 Research status of deep-sea multi-AUV multi-task allocation algorithm
a. AUV 自身的异质特性。现有的分配算法均假设所有AUV 是同质的,即性能完全一样,这与实际情况有很大差别。实际的多AUV 系统是异质的,各个AUV 的航行速度、航行的安全距离都不一样,甚至还有不同类的水下机器人协同搜索,如AUV 与ROV(remote operated vehicle)的协作搜索。考虑到这些实际因素,应用欧式距离的竞争分配是不合适的,需要找到更合适和有效的分配条件,如航行时间、安全距离等。
b. 任务分配与路径规划的环境因素。现有的分配算法大多没有考虑实际水下环境的障碍物和海流大小对AUV 航行能力的影响,SOM 自组织任务分配与规划就无法解决安全避障问题。另外,在权值调整路径规划算法中,当任务目标点与AUV 距离较大时,根据SOM 原理需要AUV 提供几公里甚至几十公里的时速,这远远大于AUV的最大航行速度。因此,存在AUV 航行速度“跳变”问题,实际上是无法实现的。
1.2 AUV 点-点全局路径规划
在多AUV 多目标水下搜索研究中,一旦AUV获得具体海域的目标任务后,接着AUV 就需要直接航行到目标海域,并展开对具体可疑海域的全覆盖搜索。此处关键问题是搜索路径规划,包括AUV 初始点到目标海域的点对点全局路径规划和具体目标水域的全覆盖路径规划。
所谓水下机器人全局路径规划是指AUV 通过自身传感器对水下环境的感知,从起始点到目标点自行规划出一条安全优化的行驶路径。AUV 全局路径规划主要完成3 个目标任务:a. 使AUV 可以从起始点运动到目标点;b. 通过特定的算法使AUV 能避开障碍物;c. 在完成以上任务的前提下,尽可能规划出一条最优路径。传统的路径规划方法主要包括可视图法、栅格地图法、自由空间法、拓扑法、模板匹配法及人工势场方法等。随着现代人工智能技术的快速发展与突破,路径规划研究也在不断发展,一些新型AUV 路径规划方法得到深入研究,典型的方法有智能优化路径规划方法、神经网络路径规划方法、启发式搜索路径规划方法等。
1.2.1 模板匹配路径规划方法
模板匹配方法(template approach)是将机器人当前所处的状态与过去经历的状态相比较,找到最接近的状态,修改这一状态下的路径,就可以得到一条新的路径[23-24]。即首先利用路径规划所用到或已产生的信息建立一个模板库,库中任一模板包含每一次规划的环境信息和路径信息,这些模板可以通过特定的索引取得;将当前规划任务和环境信息与模板库中的模板进行匹配,以寻找出一个最优匹配模板,然后对该模板进行修正,并以此作为最后的结果。模板匹配技术在环境确定情况下,有较好的应用效果。如Vasudevan 等[25]和Milmaz 等[26]提出的基于案例的自治水下机器人AUV 路径规划方法;Liu 等[27]和Carvalho 等[28]提出的清洁机器人模板匹配路径规划方法等,都是环境确定已知状况下的路径规划。为了提高模板匹配路径规划技术对环境变化的适应性,部分学者提出将模板匹配与神经网络学习相结合的方法,如:Ram 等[29]将基于事例的在线匹配和增强式学习相结合的路径规划方法;Arleo 等[30]将环境模板与神经网络学习结合的路径规划方法;Yu 等[31]将三维环境匹配与小波分析结合的路径规划方法等。相关研究提高了模板匹配规划方法中机器人的自适应性能,使机器人能部分地适应环境的变化。
模板匹配路径规划方法原理简单,在匹配成功时效果很好。但这一方法致命缺陷是依赖机器人过去的经验,如果案例库中没有足够的路径模板,就可能找不到与当前状态相匹配的路径。该方法主要适用于静态环境的路径规划,一旦环境动态变化,一般难以找到匹配的路径模板。这些不足严重限制模板匹配路径规划技术的深入研究与推广应用。
1.2.2 人工势场方法
人工势场 (artificial potential field,APF)是一种基于虚拟力场的方法,APF 的基本思想是将智能体在工作环境中的运动,设计成一种抽象的人造“力场”中的运动,这个“力场”包括引力场和斥力场,如图3 和图4 所示。引力场是目标点对移动智能体产生的,通过对智能体与目标点位置相关引力函数的建模,其引力Fatt可影响AUV 的移动速度v,而Fatt的大小与目标之间的距离相关,距离越长则受到的引力越大;而斥力场是由障碍物对AUV 产生的,同样斥力函数的建模是与障碍物位置相关的,机器人受到的斥力Frep大小与目标距离的长短有关,距离越短则斥力越大,从而达到智能体躲避障碍物的效果。障碍物与目标物在空间中产生相应的势场,其梯度的相反数就是相应的斥力或引力,二者合力使得智能体远离障碍物,向目标点运动。

图3 引力场示意图Fig.3 Schematic diagram of gravitational field
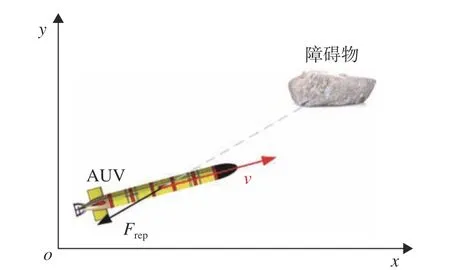
图4 斥力场示意图Fig.4 Schematic diagram of repulsion field
早期人工势场路径规划是一种静态环境的人工势场。为解决动态环境中机器人的路径规划问题, Conn 等[32](1998)在研究人工势场方法时,将时间看成规划模型的一维参量,而移动的障碍物在扩展的模型中被看成静态的,这样动态路径规划仍可运用静态路径规划方法来实现,这是一种相对动态人工势场方法。Ko 等[33](1996)将障碍物速度参量引入到斥力势函数的构造中,提出动态环境路径规划策略,但他们仅考虑环境中障碍物的运动速度,未考虑机器人的运动速度,是一个不完整的动态环境。为此, Ge 等[34-35](2002)进一步将机器人与目标物的相对位置与相对速度引入吸引势函数,将机器人与障碍物的相对位置与相对速度引入排斥势函数,提出动态环境下的机器人路径规划算法;王超等[36](2015)在此基础上,考虑到深海海流对AUV 路径规划的影响,针对常值海流模型,将海流速度合成方法和人工势场路径规划相结合,提出AUV 集成人工势场路径规划策略,以期解决水下海流产生的航行路径增加的问题。
人工势场路径规划原理简单,虚拟合力的计算便于底层的实时控制。但人工势场路径规划方法通常存在局部极小点,尽管也有不少针对局部极小的改进方法,不过到目前为止,还未找到完全满意的答案。另外,引力和斥力场设计还存在人为不确定因素,在障碍物较多时还存在计算量过大等问题。
1.2.3 智能路径规划方法
目前,现代人工智能技术已经广泛应用于移动机器人的路径规划中,并进一步扩展到水下机器人路径规划中,常见的人工智能路径规划技术运用了包括进化计算、群体智能、人工神经网络等方法。
较早应用于AUV 路径规划的是遗传算法和蚁群算法。遗传算法GA 是对自然选择和生物进化过程模拟得到的一种进化算法,该算法及其派生算法已被应用到变海流水下环境的路径规划与安全避障之中(2004, 2012)[37-38]。蚁群算法ACO 是通过模拟蚂蚁觅食的生物机制进行路径生成,它在AUV 全局路径规划中有较好应用(2007, 2008)[39-40];之后,基于群体演化的粒子群优化搜索算法PSO也被用于AUV 路径规划(2015, 2010)[41-42]。由于粒子群优化具有原理简单易实现、算法简洁、收敛速度快和鲁棒性强的特点,使其在满足AUV 路径规划实时性方面表现出色,但是也存在容易陷入局部最优,造成算法过早收敛的问题,甚至无法生成优化路径,或者在到达目标位置前过早停止。
由于模糊逻辑在不确定性信息处理方面的极好表现,而水下机器人传感器采集的环境信息又存在不确定性和不完整性,使得模糊逻辑在AUV 路径规划和安全避障研究中也取得了较好的效果(Bui[43], 2006)。高剑等[44](2012)针对AUV 避障行为,根据前视声纳探测到的障碍物距离和方位信息,采用模糊推理方法计算AUV 的转动方向和角度以避开障碍物。Ali 等[45](2015)利用二型模糊本体语义知识实现AUV 路径规划与安全避障。模糊逻辑算法是建立在人类经验的基础上,无需建立精确的数学模型,能够边规划边控制AUV 的运动,克服人工势场路径规划方法易陷入局部最优解的问题,实时性比较高。但是因为模糊控制规则是专家经验的总结,本身就存在近似,甚至错误;另外,当水下环境复杂多变时,仅凭专家经验很难构造出全面的模糊规则库,因此,其适应能力较差[46]。


图5 生物启发路径规划原理Fig.5 Bio-inspired path planning principle
生物启发神经网络路径规划同样适应于AUV[51-52],只是水下环境更加复杂,而且是三维立体地图和神经网络。同时,该方法被进一步应用到多AUV自组织任务分配路径规划之中,用以解决自组织SOM 路径规划初始航行距离与速度“跳变”和安全避障问题[53-54]。
生物启发神经网络路径规划算法具有在线自适应规划特性,但是,它同样存在环境需要已知,地图已构建的前提。由于水下环境的动态性、信息的不确定性和不完全性,在AUV 实际航行过程中,当先前未知的静态或动态障碍物出现时,使得生物启发神经网络算法不能满足动态时变的水下环境、实时情况下的AUV 路径规划要求[55-56]。此时,使用启发式增量搜索的LPA*算法[57]和D*Lite 算法[58]较为有效,它是利用先前的搜索信息来提高AUV 当前搜索的效率,不仅适应动态环境,而且具备较快的重新规划能力,一定程度上可以满足前述路径规划方法的不足。表2 给出了AUV 水下目标搜索全局路径规划方法的总结。

表2 AUV 水下目标搜索全局路径规划方法Tab.2 Global path planning method of AUV underwater target search
1.3 AUV 全覆盖水下目标搜索路径规划
当AUV 到达待搜索的具体海域后,就需要对可疑水域进行全覆盖水下搜索,其规划的主要指标就是覆盖率高、重复率小、搜索路径短。为此,需要研究多AUV 单目标海域的全覆盖自主搜索路径规划方法。
2002 年,Maxim 等[59]提出一种未知环境中多机器人合作全覆盖算法,该算法无需提前获取工作环境全局信息,机器人之间也不会发生碰撞。但是,该算法并未具体规划机器人的全覆盖路径,各个机器人均是采取随机覆盖策略遍历工作区域,故容易造成路径杂乱、重复率高等问题,而且也无法保证实现可疑区域的完全覆盖。
2009 年,Parlaktuna 等[60]提出一种基于在线传感器的多机器人全覆盖路径规划算法。采用广义Voronoi 图对工作区域进行建模并初始化出一条区域全覆盖路径,通过限量弧路由算法划分初始路径。该算法能够通过对全覆盖路径的合理划分来实现目标区域的全覆盖,但是其仅适用于机器人单向行走即可实现路径全覆盖的狭窄路径的情况,对于较宽敞的环境,则难以保证全覆盖[61]。
另外,还有许多专家学者通过对单机器人全覆盖路径规划算法进行改进或扩充,来解决多机器人间的合作全覆盖问题。例如,Janchiv 等[62]将多方法融合应用到多机器人的全覆盖路径规划中,利用单元分解法将任务区域分解为多个子区域,并根据各个子区域的情况选取合适的路径模板,使得多机器人在规划覆盖路径的过程中转弯次数最少,进而提高全覆盖效率,但是该算法并未考虑到多个机器人间的任务分配以及鲁棒性的问题。Rekletis 等[63]将Boustrophedon 区域分解算法引入到多机器人的合作全覆盖路径规划中,主要是通过该区域分解算法划分工作区域,并利用贪婪拍卖机制算法解决多机器人的任务分配和协作问题。该算法可实现区域的完全覆盖,但通常会出现机器人在覆盖最右侧的子区域后再返回覆盖左侧子区域的情况,即易产生大量的重复覆盖。Hazon 等[64]在基于STC 的单机器人全覆盖算法的基础上,提出多机器人合作全覆盖路径规划算 法MSTC(multi-robots spanning-tree coverage),有效地提高了机器人全区域遍历的鲁棒性,但并不能保证覆盖时间接近最优。对此,Zheng 等[65]和Zhao 等[66]对该算法进行改进,提出MFC(multi-robots forest coverage)算法,可以实现覆盖时间接近最优。Kapanoglu 等[67]提出一种基于遗传算法和模板匹配的多机器人合作全覆盖路径规划方法,主要是通过遗传算法的寻优能力来尽快寻找到与每个机器人最匹配的路径模板,从而使得区域覆盖时间最短、机器人能量消耗最少。但该算法更适合静态环境,在动态变化的环境中,较难找到合适的路径模板。Yang 等[49]利用生物启发神经网络算法解决了多个地面清扫机器人的合作全覆盖路径规划问题,其中每一个机器人都将其他机器人当作移动障碍物,该算法可以保证机器人之间无碰撞的合作完成目标区域的全覆盖工作,但是其并没有解决生物启发神经网络算法计算量大等问题[68]。
从目前多机器人全覆盖研究现状来看,主要针对地面移动机器人的协作覆盖,相关规划方法存在不能完全覆盖和重复覆盖度高等问题,水下多AUV 的协同规划覆盖方法处于起步研究阶段,如何实现快速全覆盖和低重复是需要重点研究的问题。
2 多AUV 多目标水下协作搜索的发展
多AUV 系统在水下搜救、探测打捞、深海资源调查、海底线管巡查维修、海事执法取证、科学研究和海军防务等诸多领域有着广泛的应用前景,虽然目前已有不少研究成果报道,但是,仍然存在大量问题需作系统深入的研究。
2.1 多AUV 水下协作搜索模式的发展
2.1.1 接近实际场景与实际AUV 的水下协作搜索
目前的研究大多将水下场景理想化,将AUV看成是完全自由控制的质点进行处理,这和实际的多AUV 水下协作搜索有较大的距离。和地面与空中环境相比,水下环境更加恶劣,不仅存在海流、海山、各类静止与移动的障碍物,还有水下光线微弱、无线通信失效及诸多干扰。另外,AUV 系统不仅存在模型不确定,而在多AUV 系统中,还存在异质AUV 问题。不同AUV 的性能、模型参数、航行速度与安全距离均不相同,这些都需要在协作搜索时重点考虑。
2.1.2 多AUV 编队搜索,包括异质异类海洋机器人的立体编队搜索
编队控制研究是无人系统协作控制的重要分支,其中多AUV 水下编队搜索已得到广泛关注[69-72]。并从同类同质AUV 编队控制,向同类异质AUV编队控制和异类异质海洋机器人方向拓展[72-73]。如图6 所示的无人艇(unmanned surface vehicle,USV)与AUV 组合的立体异类异质编队搜索。USV 既可进行水上搜索,又可进行GPS 准确定位,而AUV与水面USV 之间可以通过短基线定位系统进行信息交互,从而解决AUV 长时导航定位的难题。同时,可以利用USV 引导AUV 进行不同深度、大范围的搜索。

图6 USV 与AUV 编队搜索Fig. 6 USV and AUV formation search
2.1.3 动态不合作逃逸目标的多AUV 水下协作围捕搜索
目前的多AUV 水下搜索,极大多数研究水下静态目标的搜索,如空难中水下失事飞机、海难沉船的搜寻。但是,在国防军事领域的水下无人攻防博弈应用中,逃逸目标的跟踪拦截与围捕就是一个动态不合作目标搜索问题。它涉及多AUV围捕联盟生成(动态任务分配)、逃逸目标的智能特性、动态逃逸目标的规划跟踪、多AUV 对逃逸目标的最后围堵等诸多问题,多AUV 水下目标围捕是多AUV 系统研究的重要领域之一[74-76]。图7是一个多AUV 多逃逸目标水下围捕示意图。图中:R 表示水下机器人;E 表示逃逸目标。
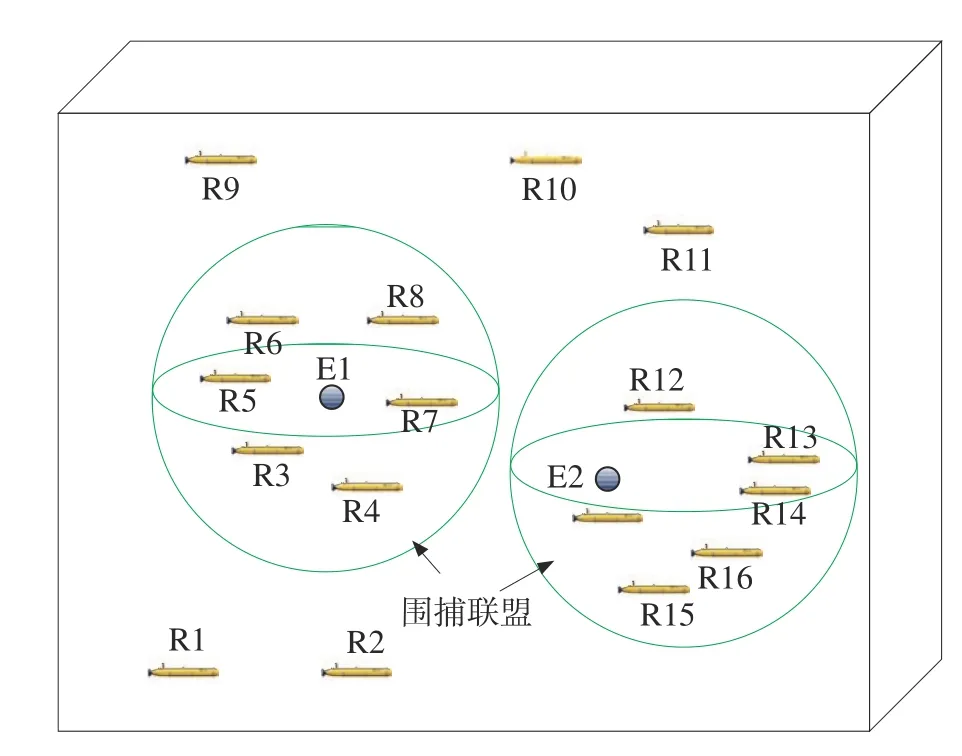
图7 围捕联盟示意图Fig.7 Schematic diagram of capture alliance
2.2 水下搜索关键技术的发展
2.2.1 新型水下搜索路径规划与导航定位方法研究
水下导航定位技术是多AUV 水下搜索的前提,常规的惯性导航与基线导航定位系统都存在各自的缺陷,而现代GPS 导航定位在水下则会完全失效。因此,需要深入研究新型水下导航定位技术,如现代的磁导航技术[76],水下SLAM 技术[77-78]等。新型的水下搜索路径规划研究是水下目标搜索的永恒主题,近些年来,一些新的智能规划方法得到关注。如BINN(glasius bio-inspired neural networks)路 径 规 划[79-82]、 MPC(model predictive control)模型预测路径规划算法[83]以及深度强化学习路径规划方法[84-86]等。
2.2.2 水下搜索路径跟踪控制技术
路径规划虽然是水下协作搜索的核心问题,但是要真正使AUV 按照规划的路径航行搜索,就需要认真研究AUV 水下路径跟踪控制技术[86-87]。由于水下环境的复杂和AUV 自身的非线性及模型的不确定性,AUV 水下路径跟踪控制同样具有挑战性,它涉及AUV 运动学与动力学跟踪控制,需要研究AUV 水下控制算法、AUV 动力学模型、海流的影响及推进器驱动饱和等系列问题[88-90]。
2.2.3 实时有效的水下目标识别技术
水下目标识别技术是多AUV 水下搜索追求的最后目标,由于海洋环境复杂,获取水下目标信息的手段十分有限,主要传感器有:微光TV、激光成像和各类声呐传感器。对深海目标搜索来说,主要是声呐传感器系统,它需要离线处理分析回放,才能得到实际目标图像,目前还无法实现在线目标识别,如美国蓝鲸金枪鱼号系列AUV系统,不仅实时性差,而且识别效果也有待提高。因此,特别需要研究新型水下感知技术[91-93]、多传感器信息融合识别技术[93-94]、智能深度图像处理识别技术等[95-97]。
猜你喜欢
建材发展导向(2022年23期)2022-12-22
建材发展导向(2022年12期)2022-08-19
领导决策信息(2018年50期)2018-02-22
商周刊(2017年5期)2017-08-22
中国卫生(2016年2期)2016-11-12
中国房地产业(2016年24期)2016-02-16
中国工程咨询(2016年4期)2016-02-14
中国卫生(2015年9期)2015-11-10
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
