自动蒸发站研发与应用探讨
2022-11-23 06:41:10雷梦佳彭英杰孔维正张侃侃
中国防汛抗旱 2022年11期
雷梦佳 易 刚 彭英杰 孔维正 张侃侃
(中国电建集团中南勘测设计研究院有限公司,长沙 410007)
0 引 言
水面蒸发指水面的水分从液态转化为气态逸出水面的过程。水面蒸发包括水分化汽(又称汽化)和水汽扩散两个过程[1]。水面蒸发是水循环过程中的一个重要环节,是水库、湖泊等水体水量损失的主要部分,也是研究陆面蒸发的基本参证资料。在防汛抗旱、工程建设、水资源管理及科学研究等方面,搜集蒸发基本资料都有用到水面蒸发观测。目前我国用于蒸发的测量有ϕ20 cm 的小型蒸发皿和E601型蒸发皿两种,观测方法以人工观测为主。在地面气象观测中,以往大多使用ϕ20 cm的小型蒸发皿,曾有专业人员用15 a的夏季水面蒸发量观测资料作对比,发现ϕ20的蒸发皿测得的蒸发量比E601型测量的偏大75.8%[2]。
目前基本水文站一般使用E601 型蒸发皿,采用测针(分辨力为0.1 mm,量程为70 mm或100 mm)每天8时定时进行人工观测并计算日蒸发量。这种耗费人力的方式不能对水面蒸发的日变化过程定量描述、不能实现蒸发量信息的自动存储和远程传输,更不能在蒸发皿受大风或异常干扰而出现异常数据时自我校正。人工观测的数据质量不仅与人员素质有关,也与工作人员的不同观测习惯有关,这影响到自动蒸发对比数据的误差大小。因此在信息化高速发展的今天,亟待有数据精准、运行可靠的全自动智能蒸发监测设备来替代人工。
1 蒸发量计算
《水面蒸发观测规范》(SL 630-2013)的日蒸发量计算如式(1)所示[3]:

式中:E为水面蒸发量;P为日降雨量;h1-h2为前日与当日的蒸发器液面高度之差;∑h溢为前日8 时至当日8 时溢流水量之和;∑h加( )补 为前日8时至当日8时加入水量之和;∑h取( )汲 为前日8时至当日8时取出水量之和;单位均为mm。
人工观测与自动监测在计算方法上有新的变化。人工计算是基于当日8 时至次日8 时的日总量值,在风和日丽没有干扰且观测人员经验丰富的情况下,用电测针测出的数据是完全可信的。但若有异物落入蒸发皿,水体受干扰时,人工观测得出的结果必然会有误差。这时自动观测可以按照细化到分钟级别的原始数据,发现这一异常跳变,记录并剔除这个不合理值,即自动蒸发中的数据智能识别。降雨时,该情况尤为值得考虑。理想状态下,人工观测的降雨量稍多于蒸发皿上涨的液位值(假设无溢流),则可计算出合理的日蒸发值,但因风速、风向、安装位置等因素影响,可能会导致两种情况:①液位涨值大于观测雨量值,则日蒸发量出现负值;②液位涨值大大低于观测雨量值,则计算出的日蒸发量会出现不合理性偏大。可以这样理解,公式(1)中,P原本应该用实际落入到蒸发皿中的降水量来计算,但现代科技手段不能精准测出这个真实值,只能用另设的一个人工雨量观测值来代替,所以出现了差异。
通过自动观测,每5 min 观测的蒸发皿液位以及雨量值都可以实时精准监测,但自动蒸发计算可能会出现下面的问题:假如某天只有2 h 有降雨,其余时段无降雨,且传感器数据可靠无异常(22 h 的蒸发值正常),若这2 h 的蒸发值计算出来是负值,这个负值参与计算会使日蒸发量值偏小。若采用翻斗雨量计与口径618 mm的E601型蒸发皿观测,降雨时根据其液位变化可计算出各时段内的蒸发皿所承受的降水量,利用数据相关性可准确判断出雨量计是否淤堵。降雨时用液位涨值与相应时段雨量计值的相关对比就可以说明自身数据的可信度高低,既可以看出液位与降雨量是否同步,又能体现出蒸发皿与雨量计各自承受降水量的细微差别。
从计算方法上看,自动蒸发观测与人工观测的最大区别是什么时候降雨、雨强多大,通过蒸发皿液位和雨量计的全时段自动观测可一目了然,分时段数据的对比能看出设备的好坏与精度,微分精准的分时段原始数据又保证了日蒸发量结果的准确度。
2 自动蒸发技术方法对比
自动蒸发观测若要替代人工观测,原则上必须数据要准、运行要可靠。目前的自动蒸发站设计,按传感器安装方式可分为蒸发皿外安装和蒸发皿内安装。蒸发皿外安装即传感器装在另外一个测井内,以连通器原理实现对蒸发皿内的液位测量。传感器测井大小会影响蒸发皿液位的实际值大小,蒸发皿液位下降时,测井内的水会回流。而对于蒸发皿内安装,传感器因占据部分水体面积而影响到水体蒸发,传感器所占蒸发皿水体面积之比越小,则误差越小、越接近蒸发皿真实蒸发值。假如能做到传感器象一根针那样插在水中就能实现液位测量,则测量结果更接近理想真值。
自动蒸发站中最重要的是雨量与液位的观测。液位观测方法可分为浮子式、补水计量式、称重式、声学与光学法、磁致伸缩式。
(1)浮子式工作原理是用连通管将E601 型蒸发皿水体与“静水井”相连,用高精度、高分辨率的浮子式水位计测量“静水井”的水位,也就测得了E601 型蒸发皿内的液位变化,如图1所示。由于“静水井”等设施的存在,浮子式液位观测方法的水体较E601 型蒸发皿大,两者观测到的数据存在偏差,同时码盘、编码器也存在误差,水位计的数据作为间接结果,需要按综合折算系数将自动蒸发仪观测数值转换为标准蒸发值。这是一款研发较早、仿照传统水情自动测报系统水位测井方式的设计、能成熟稳定使用的设备。
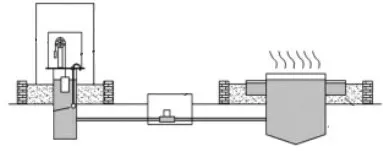
图1 浮子式测井结构示意图
(2)补水计量式目前运用较少,主要依据动态水量平衡原理[4]。在系统完成整个水面蒸发测定过程中,蒸发皿内的液位保持不变,恒压供水装置负责补水,受控制溢出的水量可通过自动计量设备测定。无降雨时,在单位时间内流入的水量减去溢出的水量,差值即为蒸发量。这种动态定量补水的方式,是否影响水面的汽化值得商榷。
(3)称重式测蒸发是近几年推出的新产品,仍然是连通器的原理。小测桶的液位随着与之连通的E601 型蒸发皿的液位变化而变化,通过测出小测桶内水体的重量,按密度、系数换算成相对的液位值。测重传感器测量精度高,但冬天与夏天的几十摄氏度温差、内地与西藏几千米的气压差、干净水与脏污水体的密度改变,是否会影响最终计算结果的精度需要进一步考虑。
(4)声学法是利用超声波收发装置测出超声波从发射头到反射面的传播时间,从而计算出距离,精度一般是厘米级别。光学法是用激光收发器测出激光从发射头到反射面的时间,再算出距离。点激光的测量精度很高,小量程的可做到微米级别。由于是点激光,则测量管所占E601型蒸发皿水体面积比上述几种方式大大缩小,结果更接近E601型蒸发皿标准蒸发值。
(5)磁致伸缩线性液位传感器主要由波导丝、测杆、电子仓和套在测杆上的非接触浮子(内装有永久磁铁)组成,原理结构如图2所示。当传感器工作时,电子仓内的电路产生“起始脉冲”,脉冲沿波导丝恒速传输,同时产生沿着波导丝跟随脉冲前进的旋转磁场,当该磁场与浮子的永久磁场相遇时,产生磁致伸缩效应,使波导丝发生扭动,这一扭动被电子仓内感知并转换成“终止脉冲”。通过计算时间差即可测出其位移量,进而得到液位值。由原理可知,磁致伸缩液位计既具备浮子式液位计精准反应液位变化的优点,又避免了如微动开关等接触式器件易损坏、影响寿命的问题。波导丝作为脉冲传输介质,本身特性是稳定的,不像空气或液体等介质会有一些变化。磁尺输出的是真正的绝对数值,不需要定期重新标定,测量过程无须重归回零位。
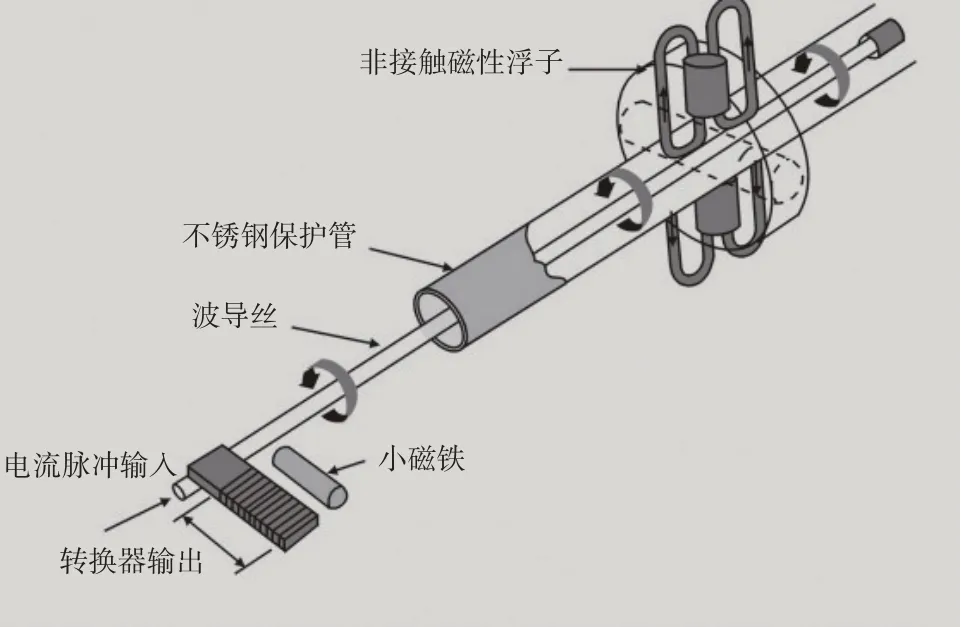
图2 磁致伸缩液位计结构图
磁致液位计具有较高的测量精度,能可靠识别0.1 mm的微量变化,其具体性能指标见表1。磁致液位计在蒸发监测使用场景中存在其测杆与浮球易发生黏滞的问题。设备在运行一段时间脏污之后,一点小小的污物导致的摩擦阻力会让浮球被卡阻,反应出的现象是液位数据数小时至十几小时不变,若变则变化一个幅度较大的值(不符合水面蒸发的缓变物理过程),黏滞使蒸发液位的变化不能准确实时地测量出来。
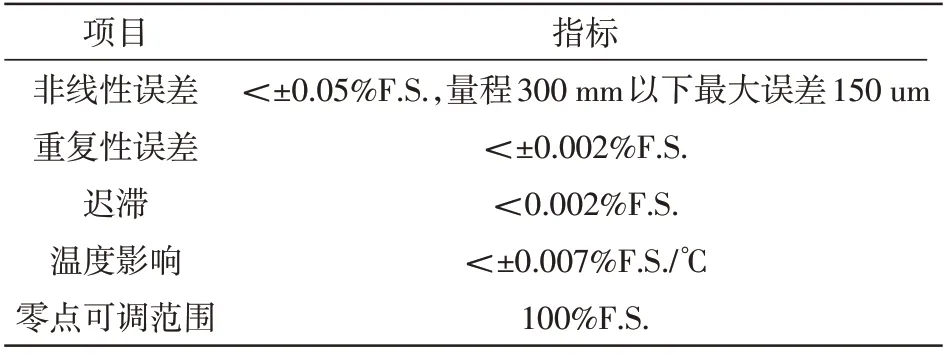
表1 磁致液位计性能指标
针对磁致液位计黏滞问题设计了专利壳体,使得测出的数据不但灵敏度很高,在防污防黏滞的同时还具有另一个优势:冬天在测管内加入适量防冻油,能顺利实现南方地区薄冰期自动蒸发站不停测。对于液位传感器的选择,应在保证精度和可靠性的前提下,首选占蒸发皿水体面积小的液位传感器,测量即可直接得出准确结果,避免间接换算而产生误差。该液位计壳体管径为35 mm,仅占E601型蒸发皿水体面积的0.3%,能有效减小蒸发测量系统误差。液位计可直接装于E601型蒸发皿内侧壁,不用挖土另建测井,便于老站的改造。
3 观测实验数据分析
通过持续对自动蒸发站的研究,对多个试运行比测站点的数据观察分析,逐步发现问题并不断改进监测方法,整个蒸发监测系统日趋稳定成熟,在此对所研发的自动蒸发监测系统进行简单介绍与数据分析。
自动蒸发监测系统按功能应用分观测场、本地管理站、云端网页3 部分,系统组成见图3。观测场包括箱体(RTU(Remote Terminal Unit)、温湿度计、光板、电池)、液位计(安装于E601 型蒸发皿内侧)、雨量计和全自动加排水设施。RTU 采用工业5 寸彩色触摸屏。本地管理站是通过有线或无线将本地水文站办公室PC 机与RTU 相连,办公室PC 机可直接操控RTU,进行设备调试、参数读写、整理等。室内操作免去了维护人员在室外的风吹日晒之苦。云端网页是系统设计了云平台Web 网站——水文气象信息自动监测集控管理平台。这一功能的设计,方便相关工作人员和决策者随时从网页实时获取自动蒸发站的实时信息,包括日蒸发量、小时降水量、蒸发器水面高度、综合过程线、全景图等。

图3 自动蒸发站系统组成图
从多站的运行比测可看出,磁致液位计数据精度和可靠性比传感器直接裸装于蒸发皿内要好[5]。选取南方区域雁池和株洲自动蒸发站的部分夏季实际运行数据,进行翻斗雨量计、人工观测雨量、E601型蒸发皿液位涨值的对比,见表2。雁池站位于湖南省石门县雁池乡雁池水文站,东经110°55′,北纬29°48′。雁池水文站为澧水支流渫水上游及皂市水库入库站,属于省级重要水文站。株洲站位于湖南省株洲市芦淞区王塔冲,东经113°80′,北纬26°47′,毗邻湘江。
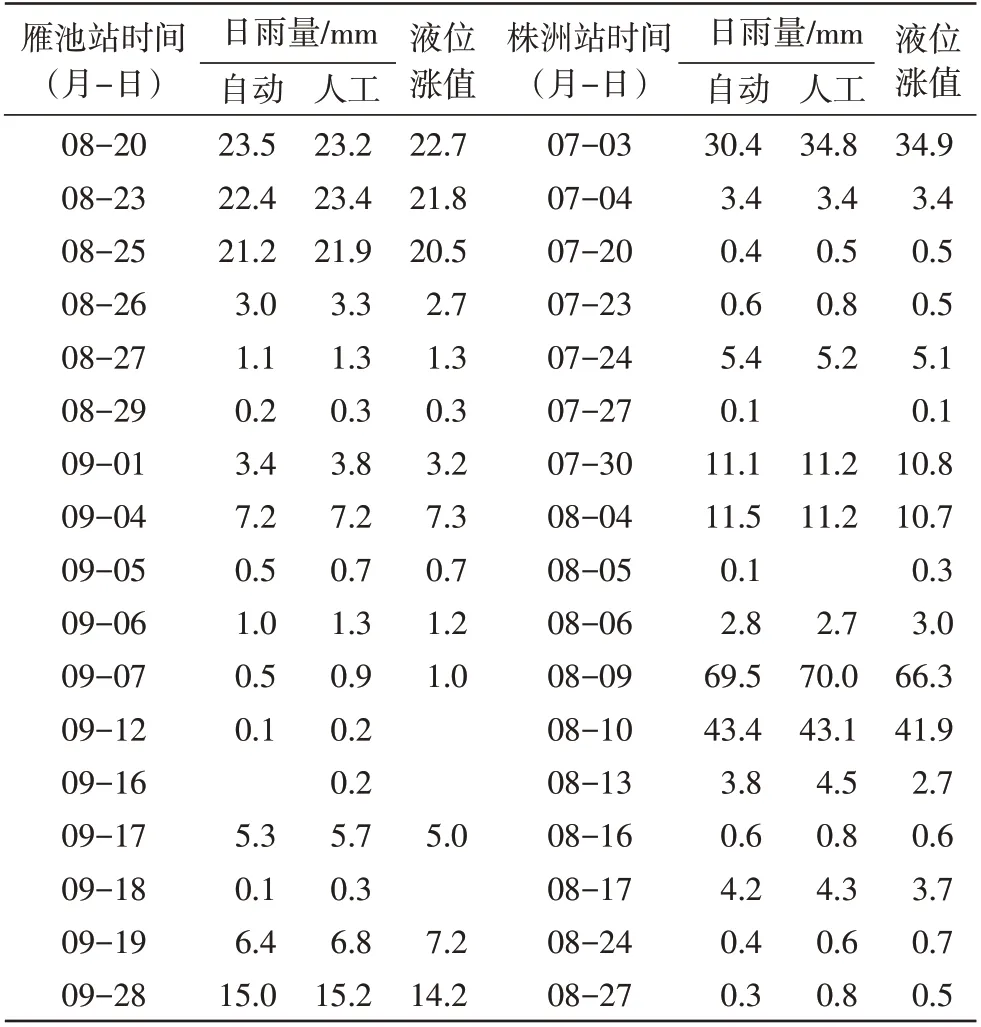
表2 2021年不同站翻斗日雨量、人工观测日雨量与蒸发皿液位对照
表2 中,自动翻斗雨量值、人工观测雨量和E601 型蒸发皿的液位涨值分别是3 个相距数米远的不同容器所体现出降雨时的对应观测数据。雁池站2021年9月16日人工观测日雨量为0.2 mm,而翻斗雨量和蒸发皿内液位涨值均为0,株洲站2021年7月27日人工观测日雨量为0,而翻斗雨量和蒸发皿内液位涨值均为0.1 mm。翻斗雨量与液位涨值对于有雨或者无雨监测的同步一致性说明了自动观测方法的可靠性,同时也说明了人工观测本身就可能存在误读或误记,不能作为自动观测误差衡量的唯一参考标准。
此外,表2显示3个不同观测对象的值作为3个独立变量,既有在降雨日变化必然的相关一致性,也有各自不同的细微差异性。从大量的原始数据观察得出,这样的细微差异是客观真实存在的,可以简单理解为雨下得不均匀。同理,这也很难在降雨时,观测到其自动蒸发观测值与人工蒸发观测值绝对的一致。
表3 数据为两个测站1 h 液位涨值与1 h 翻斗雨量计值的对比。两个测站1 h 翻斗雨量值与液位上涨值最大误差是0.3 mm。相应时段两个对应数据的高同步性印证了磁致液位计的高精准性。
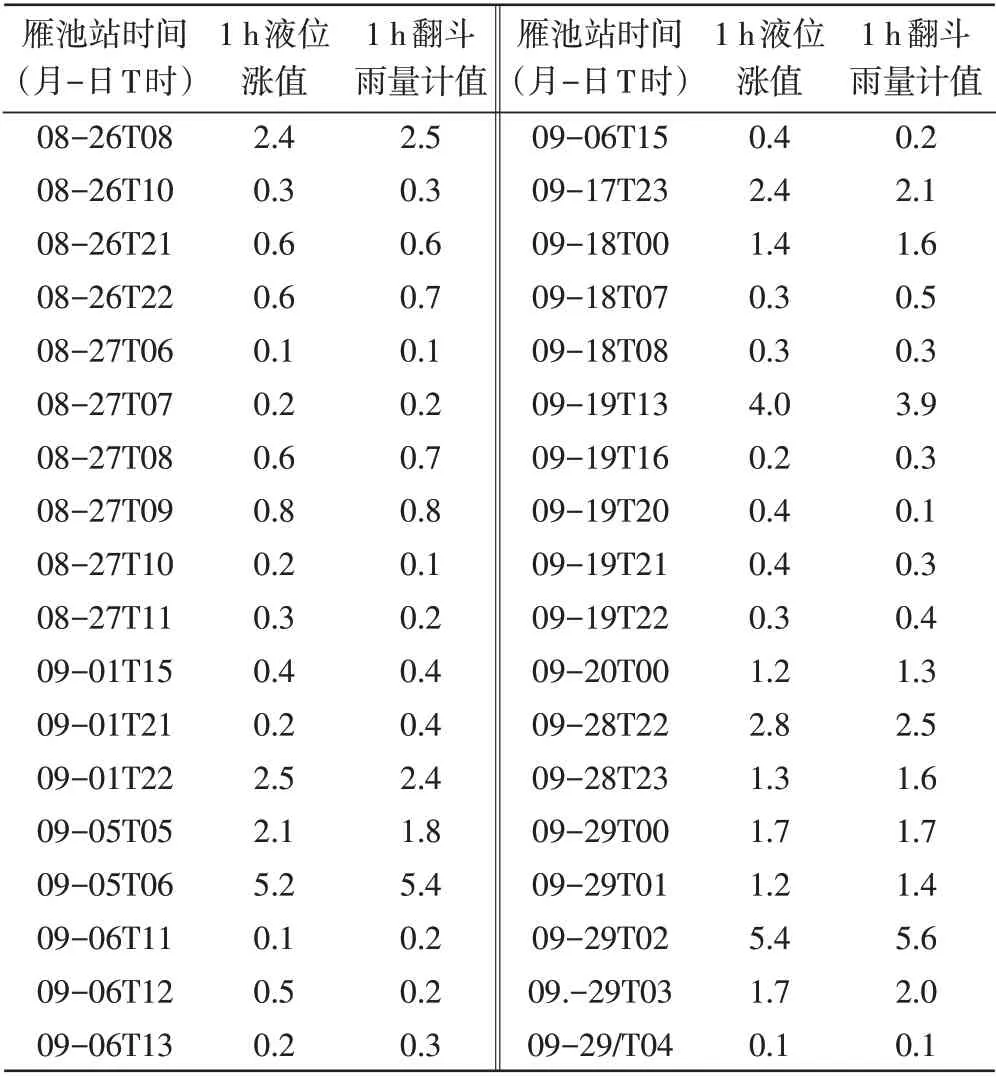
表3 2021年不同日期降雨时蒸发皿液位涨值与翻斗雨量计值1 h对比
以往做自动与人工的数据比测,均是采用两个E601型标准蒸发皿,雨量也是翻斗雨量计与人工观测雨量计的两套数据。但经过自动蒸发测试研究发现,同样类型的磁致液位计分别观测两个E601 型蒸发皿,每天的蒸发量值会有偏差,水体较脏的一个蒸发量偏小。为了证明不是液位计的原因造成,将两液位计再安装于同一个蒸发皿内观测,每日数据就变成一致了。这个实验证明两个不同蒸发皿水体的蒸发量是存在细微差异的。由此也推测,自动观测与人工观测的20 cm 口径两个雨量计,得到的日观测数据也是会存在差异,除非将翻斗雨量计的雨水完全接入人工观测玻璃瓶中,这样所得的对比数据才更科学。今后在比测中可另外安装一个35 mm 直径的磁致液位计在人工观测蒸发皿中,仅作为全时段的人工池液位数据采集用(不自动加排水),有了两个液位传感器的数据与人工观测值的对比,则会得出更科学合理的比测结果。
4 结 语
综合自动蒸发站研究的对比分析,液位计选型以解决黏滞问题的磁致液位计为最优。磁致液位计因不受海拔高度、温度气压限制和小口径占E601型蒸发皿水体面积小等优点,而具有广泛的适用性。除了北方冬天蒸发皿整个水体冻成冰不能使用,特别适合南方地区全周期自动蒸发观测。小型优化的外观设计降低了蒸发站改造安装的建设成本。
随着技术不断进步,自动化程度会更高。自动设备的职责就是做人力所不及、人力所不能之事。如果自动观测设备仍是模仿人工模式,只观测8时的数据,或监测间隔时段很稀疏,则似乎对不住“自动观测”这一名称。对于自动蒸发站,是否可以逐步达成共识,除了应有一些常规功能外,液位与雨量应按照《水利监测数据传输规约》[6]每5 min采集存储,且RTU具有智能数据识别功能,对大风、人或动物造成的异常数据能及时发现、记录和剔除,同时RTU 的南方薄冰期不停测功能对于自动蒸发站也颇有价值。
自动蒸发设备若能得到制度化的定期运维,则必能保证长期稳定可靠的运行。目前设备加入了人工智能,不久后可能会有自动自清洗功能。全时段精准的原始大数据必能为今后的科学研究提供更丰富的基础数据支撑。
猜你喜欢
水利科学与寒区工程(2024年2期)2024-03-28 03:07:32
陕西水利(2024年2期)2024-02-27 05:24:58
黑龙江水利科技(2021年8期)2021-09-03 12:17:56
水利技术监督(2020年4期)2020-07-16 03:12:36
中国特种设备安全(2019年9期)2019-12-03 09:25:58
传感器与微系统(2018年7期)2018-08-29 00:44:40
石油化工建设(2018年1期)2018-07-10 09:49:54
中国农村水利水电(2017年4期)2017-03-21 03:21:21
少年科学(2016年6期)2017-02-08 17:50:12
水科学与工程技术(2016年2期)2016-07-10 10:19:57