
基于多尺度光谱角制图的遥感影像单木树冠提取方法
2022-11-23 13:13邱琳,刘敏*,王磊
安徽农业科学 2022年21期
邱 琳,刘 敏*,王 磊
(1.广州市城市规划勘测设计研究院,广东广州 510060;2.广东省城市感知与监测预警企业重点实验室,广东广州 510060)
单木树冠是组成林区的基础个体,单木树冠提取不仅关系到单木树种分类的精度,也在单木层次的林业调查中发挥着重要作用[1-2],一些森林参数的测定和评估如树高[3]、冠幅[4-5]、胸径[6-7]等也与单木树冠的提取息息相关。高分辨率的遥感影像为单木树冠的提取提供了高质量的数据来源,一些基于该类影像的提取方法也得到了发展[8],如谷跟踪[9-11]、区域生长[12-15]、分水岭变换[16-20]等,其中基于区域生长和分水岭变换的方法较多,如 Brandtberg等[21]通过生成多个比例级别的原始草图,并从中选择树冠的种子点提取出单个树冠;Culvenor[13]利用局部最大值和最小值对单木树冠进行识别;Erikson[12]使用模板匹配和基于复杂规则的区域生长进行单木树冠提取;Fang等[22]结合数学形态学和标记控制的分水岭分割提取单木树冠;陈崇成等[23]利用局部最大值探测树冠种子点并使用区域生长得到树冠轮廓。
上述方法大多先对树冠进行探测得到种子点,之后使用区域生长或分水岭分割。这些方法在针叶林和树冠直径差异不大的林区取得了良好的提取效果,但在阔叶林和直径差异较大的林区中会出现明显的过分割和欠分割,这是由于在基于区域生长或标记控制的分水岭分割中,种子点(即标记点)的尺寸和大小的选择至关重要[24-25]。若标记点的尺寸过小,其数目会相应增多,难以有效抑制虚假的树冠标记,出现过分割;若尺寸过大,其数目相应减小,直径小于标记点尺寸的树冠难以被正确标记形成相应的树冠种子,进而导致欠分割。而在单木树冠直径跨度丰富的林区,较难找到一个最优的单尺度使其能够准确识别林区中所有的树冠形成树冠标记。Jing等[26]曾利用3个不同尺度形成树冠标记,并对三者的提取结果进行整合和修饰,以缓解过分割和欠分割,但这在树冠直径较丰富林区中的提取效果仍有限。
因此,针对现有的基于标记控制的分水岭分割算法在复杂、尺度直径丰富的树冠遥感影像中所存在缺陷,如对树冠标记检测能力不足,检测效果不佳,检测精度不高等,笔者结合梯度图像和HSV空间变换,以光谱角制图的方法为基础理论,提出了一种改进的多尺度标记点的探测方法。首先使用形态学梯度得到梯度图像;接着根据树冠在影像上的辐射、直径和形状特点,使用HSV变换后的V分量作为前景图像并结合局部最大值法探测树冠标记点,通过高斯滤波抑制噪声,集中树冠顶部幅度值,并在多个连续的尺度上进行探测,得到综合多个尺度信息的多层级标记控制点;之后,对多层级标记点进行图层整合,并用光谱角制图的方法控制整合过程,得到整合后的最终标记点;最后进行基于标记控制点的分水岭分割。与单尺度标记控制点的最终提取结果相比,该研究的处理方式提取精度更高,对直径各异的树冠提取性能更好,能有效地抑制树冠提取中的过分割和欠分割,有较好的普适性。
1 基本原理
1.1 算法总述该研究算法本质上是一种非监督学习的单木树冠自动提取方法,旨在从森林遥感影像中自动提取完整的单个树冠。具体流程如图1所示,主要实施步骤如下:

图1 算法流程
(1)对原始遥感影像进行多维形态学膨胀和腐蚀生成基于多通道信息的梯度图像。
(2)构造尺度参数形成一系列单尺度层,在各层上寻找区域最大值,将最大值对应的一片区域作为单尺度的标记控制点区域。
(3)对单尺度上的标记控制点区域逐层进行层级化处理和光谱角判别,形成最终的标记控制点区域。
(4)结合梯度图像和标记区域进行标记控制的分水岭分割,得到单木树冠提取结果。
1.2 梯度图像的生成常用的梯度算子如Sobel算子、Prewitt算子、高斯拉普拉斯(Log)算子、Canny边缘检测等都是基于单通道图像或是灰度图像进行边缘探测[27],对于在某些特定波段存在较大差异的边缘探测效果有限。参照在单通道影像中形态学梯度图像的计算方法,使用形态学多维膨胀和腐蚀,对原始遥感影像直接进行多维形态学计算,获取基于多通道信息的梯度图像(图2)。这种直接对原始影像进行处理获取梯度图像的方式避免了传统算子需要预先对影像进行灰度化处理的过程。而影像灰度化的过程会损失一部分原始图像中的多通道光谱信息,减少原始影像边缘数据的波段信息量,导致在某些特定波段存在明显差异的边缘失去了能够被探测到的显著性,不利于边缘的有效探测。由于进行分水岭分割的梯度图像本质上是一幅标量图像,而通过多通道形态学计算得到的是一个矢量结果,因此还需要对矢量结果进行标量的转化,笔者采用矢量的模值进行二者之间的转化[28]。具体计算方式为
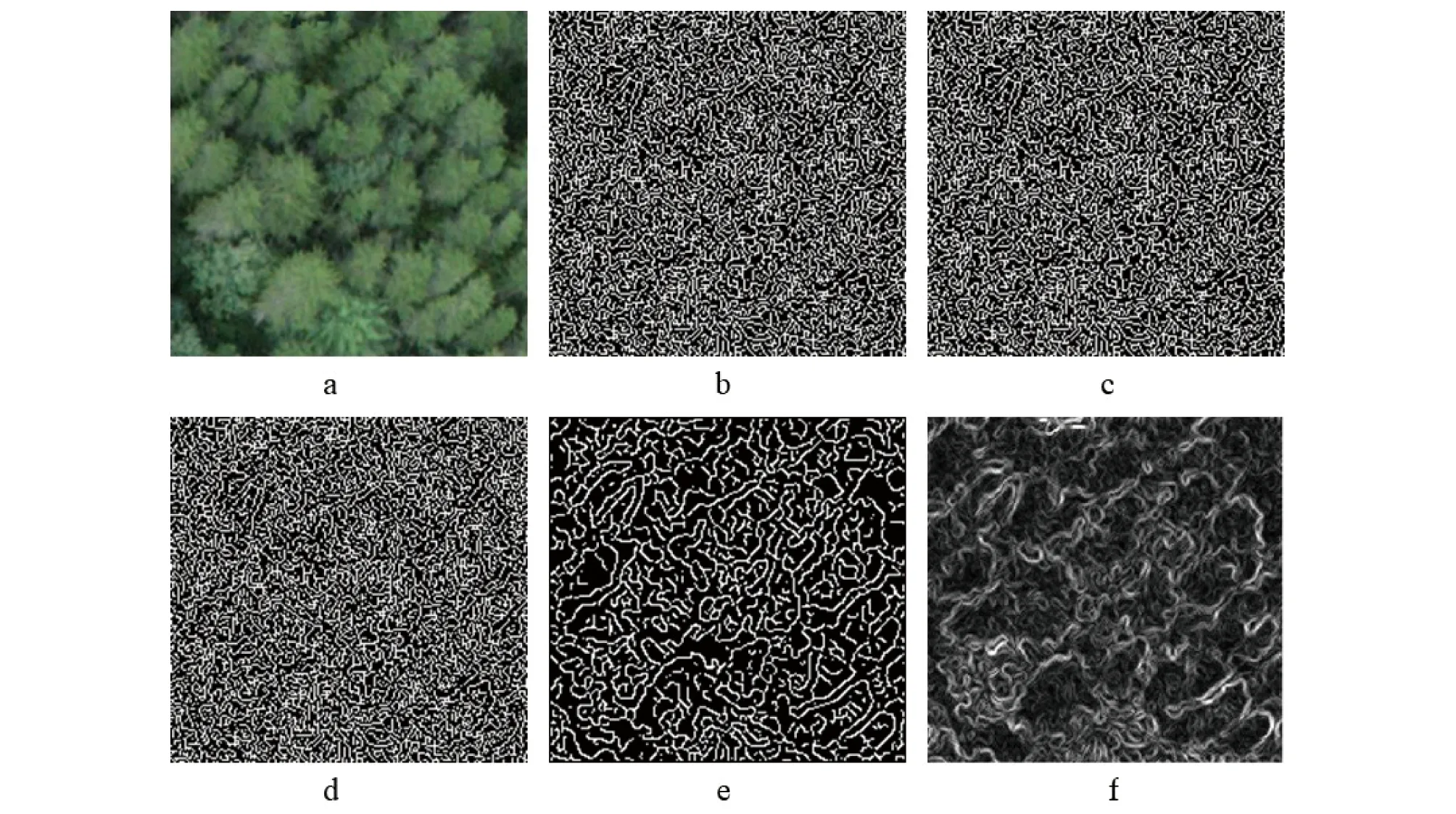
注:a.原图;b.Sobel;c.Prewitt;d.Log;e.Canny边缘检测;f.形态学梯度
G(f)=dist[d(x,y)-e(x,y)]=‖(f⊕B)(x,y)-fΘB(x,y)‖
式中,d为多通道膨胀,e为多通道腐蚀,f为n维向量,B为结构元素,‖.‖为取模运算。
1.3 标记控制点的自动生成
1.3.1基于单尺度生成的标记控制点。在得到梯度图像之后,常规的操作是在梯度图像上寻找局部最小值,然后将局部最小值作为标记控制点,进行后续标记控制的分水岭分割。该研究考虑到单木树冠的树顶是树冠局部辐射亮度值最大的地方,于是先对原始图像进行了HSV空间变换。由于HSV空间的性质,其变换后的V值分量包含了原始图像中大部分的亮度信息,因此将V值成分作为亮度图像,随后在该图像上寻找局部最大值(即树顶),将其作为进行标记控制的分水岭分割的标记控制点。3种不同单尺度(小尺度、中尺度、大尺度)上所生成的标记控制点结果见图3。获得亮度图像后寻找标记控制点的具体操作步骤为:

注:a.原图;b.小尺度标记点结果;c.中尺度标记点结果;d.大尺度标记点结果
(1)用圆形高斯滤波器对整幅树冠影像进行滤波。滤波窗口的大小根据影像中树冠的直径大小(即尺度)设定,设树冠的直径大小为r个像素,那么滤波窗口的大小为r×r个像素,sigma的大小为0.3r个像素。这里sigma的取值通常取窗口半径的50%[26]。滤波的目的在于压抑树冠顶部区域外的噪声,便于更加集中树冠顶部的辐射值。
(2)在滤波后的影像上利用区域最大值算法在八邻域内寻找局部区域上的最大值。寻找的最大值不是一个点,而是一片由极大值形成的区域。
1.3.2改进的基于多尺度生成的标记控制点。由“1.3.1”中在单尺度下形成的标记控制点(即树顶)可以看出,尺度的大小直接影响标记控制点的个数和大小。尺度值越小,标记点越密集,相应的标记点所影响的区域范围越小,这对提取直径较小的树冠有利,对于直径较大的树冠会出现过分割,即提取结果过于细碎、树冠内部破碎、树冠的整体性无法得到保留;尺度值越大,标记点越稀疏,相应的影响区域范围越宽广,这对提取直径较大的树冠有利,对于直径较小的树冠会出现遗漏情况,即难以将其正确标记为树冠种子,易与相邻的树冠一起被错认为一个树冠。以上2种情况都会严重影响最后的提取精度,并且仅靠单一的尺度难以做到同时改善这2种问题,即在这2种尺度之间较难寻找到一个最优尺度使其既能提取出直径较小的独立的树冠轮廓,又能保证直径较大树冠的完整性。该研究基于多尺度方法所生成的标记控制点结果见图4。笔者基于上述考虑,在单尺度标记控制点的基础上运用一种基于多尺度的控制点层级化处理方法,使其能兼顾小直径树冠的轮廓提取和大直径树冠的完整性,具体操作步骤如下:
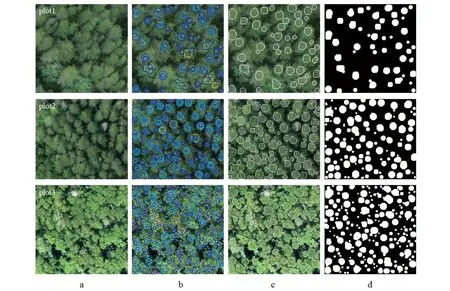
注:a.原图;b.多尺度标记点生成过程;c.标记点叠加在原图上的结果;d.标记点二值化的结果(白色区域为标记点)
(1)按照提取需求,根据影像中树冠的最小直径和最大直径分别设置提取尺度的下限和上限。
(2)根据影像中树冠直径之间的跨度,设置尺度变化的步长。在该试验中为了使用连续变化的尺度,保证探测和提取到连续变化的不同直径的树冠,步长设置为2个像素。
(3)对每个尺度重复进行“1.3.1”中的操作,根据尺度从小到大的顺序依次形成L1,L2,…,Ln等不同的标记控制点层。
(4)从L1层开始,将L1层与其相邻的L2层进行同心叠加[29],形成一个组合层,并在叠加过程中进行光谱相似度判别,得到一个新的Lc层。Lc层中的标记控制点对L1层和L2层中具有相似光谱特征的标记区域进行了融合,对具有不同光谱特征的标记区域进行了保留。光谱相似度的判别采用光谱角制图(spectral angle mapper,SAM)的方法,其计算方式如下:
式中,a为小尺度区域内的树冠像元光谱(待比较光谱),b为相邻大尺度区域内的树冠像元光谱(参考光谱),n为影像波段数。光谱相似度取值0~1。该值越大,表明各待比较树冠区域间的光谱相似程度越大。
(5)将新的Lc层与其相邻的下一层级进行同样的同心叠加和光谱相似度判别操作,直至处理完第Ln层,得到层级化后的最终标记控制点层L。
1.4 标记控制的分水岭分割基于标记控制的分水岭分割,是一种由传统的分水岭分割方法改进而来的基于拓扑理论的数学形态学的分割方法,其主要思想是将影像视为汇水盆地,影像中的每一像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆地,而集水盆地的边界则形成分水岭[16-20];标记控制的分水岭在局部极小值的获取中增加附加条件,在原图中寻找内部标记引导算法进行分割[30]。该研究在对树冠的提取中,使用“1.3”中获得的树顶作为内部标记物,“1.2”中获得的边缘图像作为梯度图像,进行标记控制的分水岭分割,得到最终的树冠提取图像。
2 结果与分析
2.1 试验数据为验证算法的有效性和鲁棒性,选取3幅不同的典型林区作为测试影像进行试验。影像的空间分辨率均为0.15 m,包含红绿蓝(R、G、B)3个可见光波段,由航拍的方式获取。3幅影像分别以针叶林、针阔混交和阔叶林为主,影像大小分别对应为196像元×202像元、235像元×270像元、295像元×305像元(图5)。
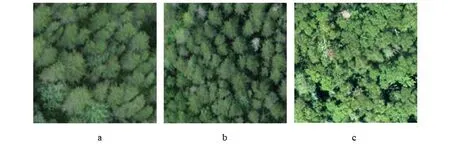
注:a.区域1;b.区域2;c.区域3
2.2 试验结果通过利用多尺度层级化的处理方式形成标记控制点,结合梯度图像,对3幅测试图像分别进行了基于标记控制的分水岭分割;并增设相应的小、中、大3个单尺度标记控制点作为对比试验,得到如图6所示的提取结果。3幅影像在试验中所用到的尺度值均根据影像中树冠的相对直径所设定,无论是单尺度还是多尺度,3幅影像所用到的具体尺度数值不完全相同。Plot1中小尺度取值为7个像素,中间尺度取13个像素,大尺度取17个像素,多尺度取7~17步长为2个像素的所有值;plot2中小尺度取9,中间尺度取15,大尺度取23,多尺度取7~23;plot3中小尺度取7,中间尺度取15,大尺度取25,多尺度取7~25。图6分别给出了小尺度(图6a)、中尺度(图6b)、大尺度(图6c)以及多尺度(图6d)的试验结果,其中最终的分割线在图中以红色显示。
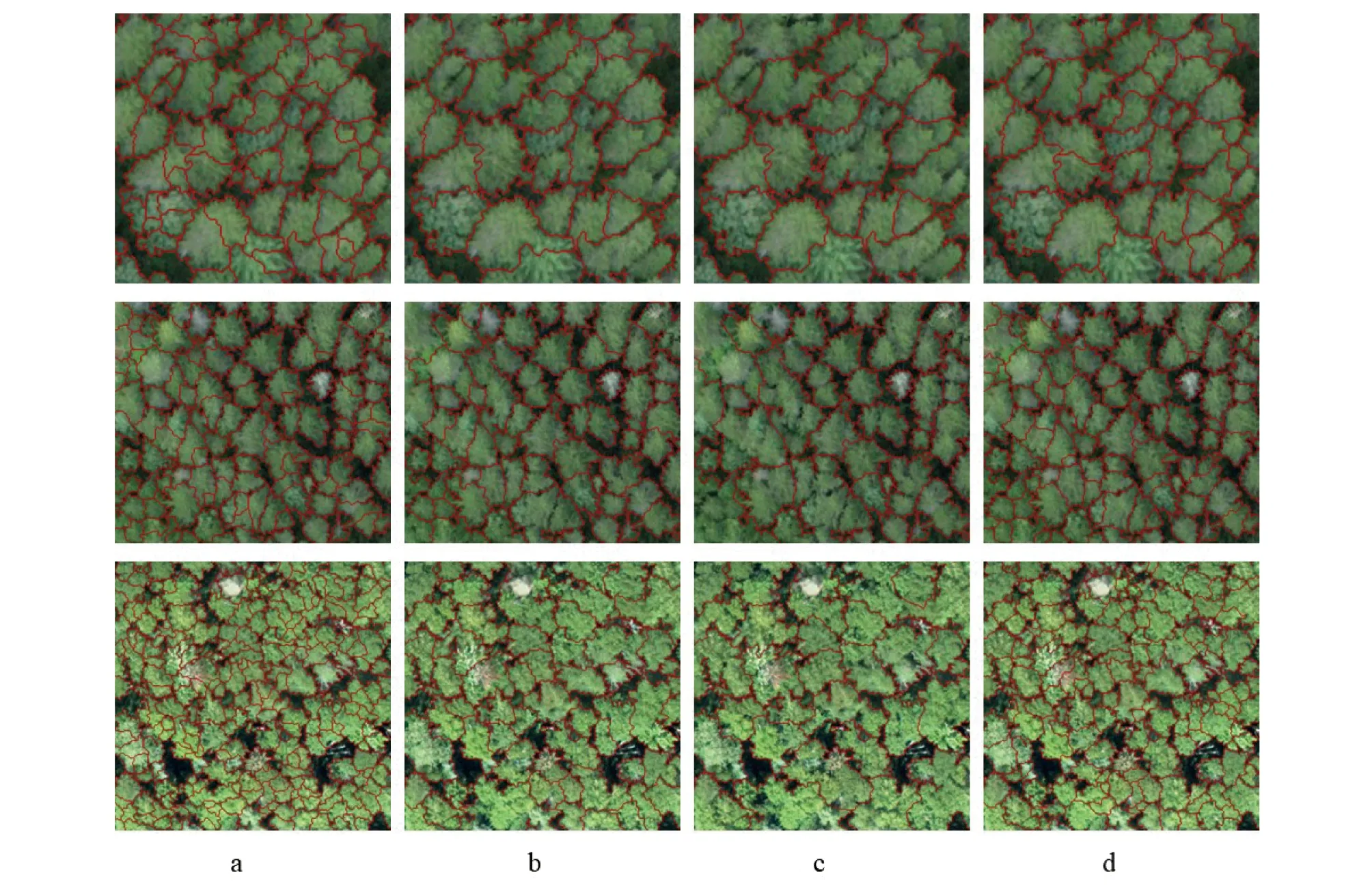
注:a.小尺度提取结果;b.中尺度提取结果;c.大尺度提取结果;d.多尺度光谱角制图提取结果
2.3 精度评价
2.3.1评价指标。在对树冠提取的精度评价中,采用树冠提取领域常用的一套面积评价指标[25,31]。首先人工圈定出能够被显著性识别的树冠,将其作为参考冠,形成参考冠层;把算法自动提取出的树冠作为目标冠,形成目标冠层;之后在程序中自动进行精度统计和计算。统计标准主要是通过参考冠与目标冠之间对应位置的面积叠加关系,把参考冠在目标冠中可能出现的情况分为4类:被合并的(merged)、未被检测出的(missing)、正确检测出的(matched)、被分裂的(split),并对这些类别的树冠个数进行自动统计,具体归类依据如下:
(1)被合并的:在参考冠中有2个或2个以上的树冠,但在目标冠层中的对应位置只有1个冠;
(2)未被检测出的:在参考树冠的对应位置处有树冠,但在目标冠层的对应位置没有树冠;
(3)正确检测出的:在参考树冠的对应位置处,目标冠层中有1个与之相对应的,二者中任有1个的重叠面积达到50%或以上的树冠;
(4)被分裂的:在参考冠层中是一个完整的树冠,但在其对应位置的目标冠层中被分成了2个或2个以上的树冠。
基于以上定义,笔者把正确检测出的树冠占总参考树冠的百分比视为树冠的提取精度(accuracy),反映算法正确提取树冠的性能;被合并的和未被检测出的树冠所占百分比视为欠分割误差(omission error),反映算法提取独立的小直径树冠的能力;被分裂的树冠所占百分比视为过分割误差(commission error),反映算法保持大直径树冠完整性的能力。
2.3.2评价与讨论。表1为3个区域分别在基于单尺度标记点和多尺度标记点的分水岭分割上的结果和精度。由表1可知,该研究所采用的基于多尺度的标记控制点的分水岭分割方法在整体精度上较基于单尺度控制点的方法均有显著提升,提取精度均达到了80%以上。在欠分割误差上,与较大尺度的单尺度标记点算法相比,有显著降低,相对误差值控制在20%以内,大大改善了标记控制的分水岭分割算法提取较小树冠直径的能力。在过分割误差上,显著改善了由较小尺度的单尺度标记点提取算法造成的大直径树冠的过分割,将误差值降到10%以内,保证了更多大直径树冠的完整性。从图6可以看到,当使用单尺度时,尺度过小则会产生较多细碎的分割,破坏树冠的完整性;尺度过大,则难以将单个树冠完整地提取出。该研究使用的基于多尺度光谱角制图标记控制点的分割算法,利用树冠的波段光谱信息,较好地平衡了这2种情况,能够在不遗漏小直径树冠的同时,保证大直径树冠的完整提取,并且避免了反复试验寻找最优标记点分割尺度的烦琐过程,自动化程度高,树冠提取效果显著。
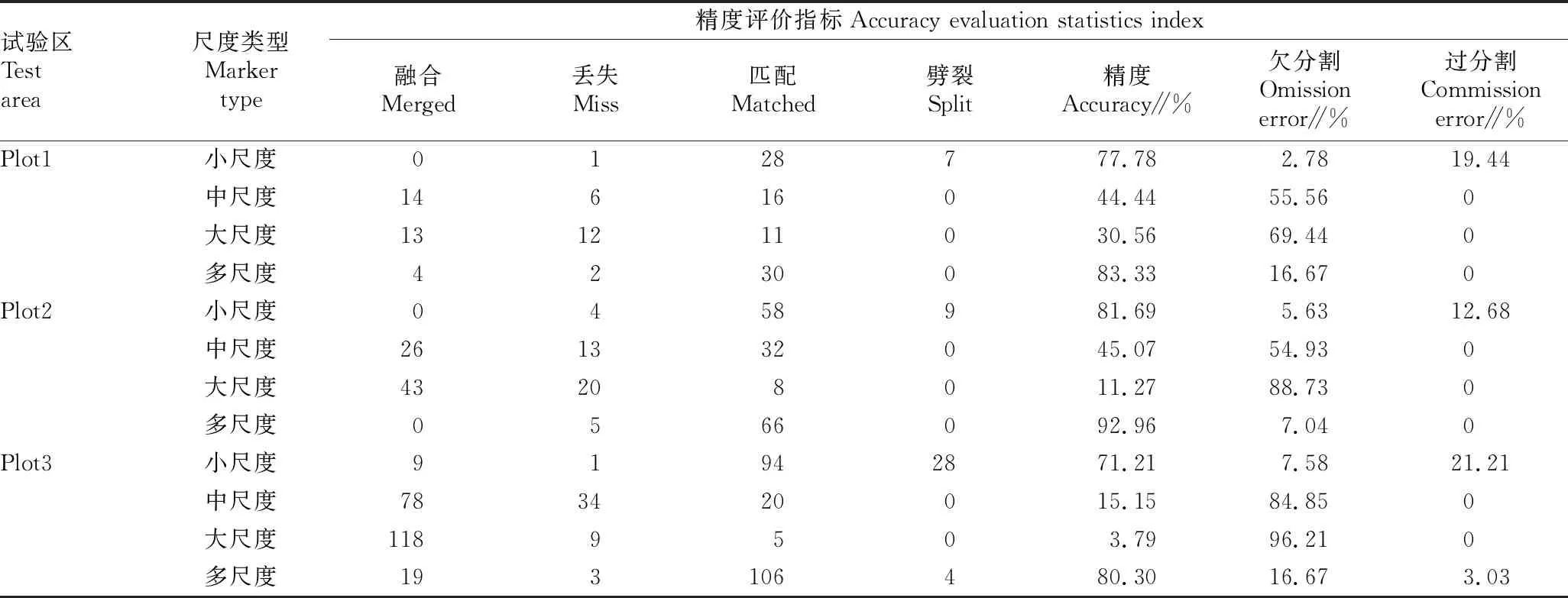
表1 测试影像精度统计结果
3 结论
为了解决单木树冠提取中最优尺度的选择以及存在的过分割和欠分割现象,该研究在基于单尺度标记控制点的分水岭分割算法上,运用多尺度层级化处理以及光谱角制图判别的方式生成标记控制点,并结合梯度图像对树冠影像进行基于标记控制的分水岭分割。这种处理方式解决了反复试验选择最优单分割尺度的问题,并且利用了树冠多波段的光谱信息,在一定程度上兼顾了对直径差异较大的树冠提取需求,保证了小直径树冠的个体独立性和大直径树冠的个体完整性。与常用的单分割尺度相比,这种方式所生成的标记控制点更加完整和全面,提取精度得到显著提高,欠分割和过分割现象也能得到综合改善,能够较为准确、完整、快速地提取出独立的树冠。另外,该试验的3种不同测试林区的结果表明,所用算法对不同林区均适用且对提取结果均有所改善,具有较好的适应性和鲁棒性,在单木树冠提取和单木树种分类方面具有较好的应用前景。
猜你喜欢
农业工程学报(2022年14期)2022-10-19
地理空间信息(2021年10期)2021-11-14
东方企业家(2020年5期)2020-05-29
文学港(2019年5期)2019-05-24
遥感信息(2019年1期)2019-03-22
兽医导刊(2019年1期)2019-02-21
森林工程(2018年5期)2018-05-14
城市道桥与防洪(2014年1期)2014-02-27
亚热带资源与环境学报(2014年2期)2014-01-23
河南水利与南水北调(2013年4期)2013-08-15
