
利用RFID信号相位清洗出入管控设备数据
2022-11-22 05:59贾俊锋
物联网技术 2022年11期
邵 壮,张 丹,贾俊锋,王 颖
(北京计算机技术及应用研究所,北京 100854)
0 引 言
RFID(Radio Frequency Identification)射频识别技术是一种无线通信技术,具有非接触、快速识别、自动检测的特点,被广泛用于库房管理、交通监管、物流装配、生产制造等领域[1]。RFID出入管控设备集RFID数据采集、出入方向判断、载体信息关联、声光报警等众多功能于一体,在库房、停车场、档案室、图书馆等有出入管控需求的场景得到广泛使用。
在实际应用中,RFID出入管控设备常常会识读到未发生出入行为的无关标签,造成物品管理的混乱,这也成为了行业中的一个难点。这种多读现象的产生有两方面原因:一方面,由于环境中的干扰产生了反射、衍射等现象,导致原本不在RFID出入管控系统识读范围内的RFID标签被识读到;另一方面,如果RFID出入管控系统部署在较小的空间中,空间中存放的RFID标签就会不可避免地出现在出入管控系统的识读范围内。
针对上述第一种多读现象,国内外学者和研究机构做了大量的工作,各种各样的数据清洗方法被提出[2];针对第二种多读现象,目前主要的做法是对RFID出入管控设备的天线做特殊的设计,控制出入管控设备的识读范围[3]。本文从RFID标签信号的相位信息入手,深入研究了具有出入行为的RFID标签与无关标签返回信号的相位特征,提出了一种针对RFID出入管控设备的数据清洗方法。实验结果表明,该方法能够在保证准确识读出入标签的同时,有效滤除干扰标签;当环境中存在10个以内干扰标签时,准确率达到92%以上;当环境中存在5个以内干扰标签时,准确率能够达到97%以上,适用于库房、档案室、停车场等有出入管控需求的场合,具有很高的实用价值。
1 相关研究
针对由环境干扰产生的反射、衍射等现象造成的多读现象,近年来国内外学者和研究机构提出了各种数据清洗算法。EPCglobal组织在其Reader Protocol协议中提出了一种静态窗口时间平滑方法用于处理RFID数据流,即在一个固定的窗口时间内发生了符合要求的识读事件(如连续多次识读)才会判定标签数据有效,这样就将波动的、不确定的数据流转化为稳定的、可信性高的数据流[4]。但是静态窗口平滑时间方法存在问题,由于RFID数据流往往都不是均匀的,窗口大小的选择严重影响数据清洗方法的性能:如果窗口选得太大,就会产生多读数据,不能对已经离开识读范围的标签进行实时反馈;如果窗口选得太小则容易产生漏读数据,不能真实反映识读范围内标签的状态[5]。
针对这一问题,有学者提出了动态滑动窗口算法[6-8],显著提升了数据清洗算法的准确率,但是这些动态滑动窗口算法在动态性、实时性上往往存在问题。有学者提出了一种基于卡尔曼滤波的数据清洗方法[9],该方法利用观测值和估计值互相修正形成了自回归的过程,保证了准确性,能够有效消除多读和漏读现象,动态性能也较好,缺点是算法复杂度较高。还有学者提出了一种利用RFID冗余数据、先验知识、环境约束等信息进行RFID数据清洗的方法。该方法通过冗余数据、先验知识、环境约束估算标签被识读的概率和实际RFID数据估计真实的RFID标签识读情况[10]。
针对RFID设备容易识读到附近的无关标签而产生多读数据的情况,目前主要的解决办法是设计近场天线,保证电磁场分布均匀、辐射范围可控[11-12],减少或避免RFID设备对附近无关标签的识读。但是这种做法缺少灵活性,RFID设备的应用受到限制。
2 方法描述
2.1 RFID标签信号相位特征
RFID读写器在工作时会向空间中发射电磁波信号,空间中的RFID电子标签接收到读写器的电磁波信号后被激活,同时标签内部电路对读写器的电磁波信号进行调制之后反射到空间中,读写器最终接收到标签的反射信号,完成了与RFID标签的一次交互。
在这次交互过程中,RFID读写器发送信号的相位和接收信号的相位之差可以用下式计算:

其中:θspace为电磁波空间传播过程中产生的相位偏移;θt、θr分别为电磁波经RFID读写器发射电路和接收电路产生的相位偏移;θtag为RFID标签反向散射调制电路在反射电磁波时产生的相位偏移。其中,θt、θr、θtag分别是由RFID读写器发射电路、RFID读写器接收电路、RFID标签反向散射电路的特性决定的,这三部分相位偏移具有稳定性[13],基本保持恒定。θspace与读写器和标签间的距离有关,可用下式表示:

其中:s为RFID读写器和RFID标签之间的距离;θspace与s成正比关系,因此RFID读写器发送和接收信号的相位差Δθ理论上仅随s变化,这一特点已经被广泛应用于RFID定位系统。本文提出的方法将利用相位差Δθ的这一特点实现数据清洗功能,下文提到的RFID标签信号相位均是指代相位差Δθ。
2.1.1 有出入行为的RFID标签相位特征分析
将出入管控系统的应用场景抽象为如图1所示的平面表示。
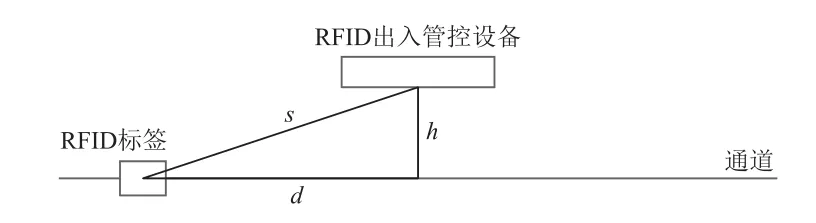
图1 出入管控系统示意图
RFID出入管控设备设置在通道一侧,其与通道间的距离为h,RFID标签与出入管控设备在通道方向上的距离为d,RFID标签与RFID出入管控设备距离,则RFID标签信号相对于读写器信号的相位可由下式求得:

其中:λ为电磁波波长,λ=c/f,c为电磁波传播速度,对于常用的超高频RFID系统,其中心频点为922.625 MHz,可求得电磁波波长约为0.325 m。读写器实际测得的RFID标签信号相对于读写器信号的相位Δθ'为:

取RFID出入管控设备在通道上的投影位置为零点,h=0.5 m,d取通道两侧2 m范围内,对上述模型进行仿真可得到RFID标签信号和读写器信号的相位差与位置的关系如图2所示。由图可见,随着标签沿着通道逐渐靠近出入管控设备,标签信号的相位逐渐减小且呈周期性变化;在与RFID出入管控设备距离比较小的范围内,相位差呈现类似抛物线变化;之后,随着RFID标签逐渐远离RFID出入管控设备,相位差逐渐增大且呈周期性变化。
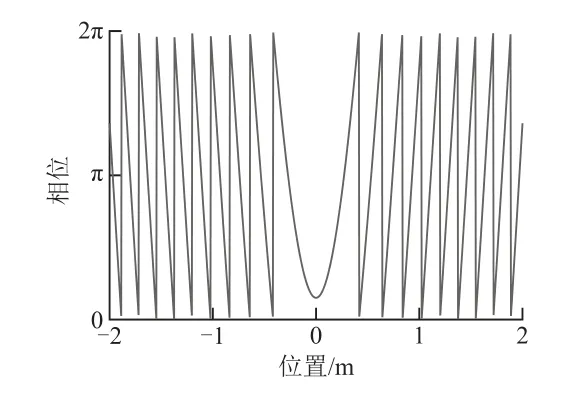
图2 RFID标签信号相位与位置关系
本设备采集到的相位差存在π相位模糊,即标签相位可能是读写器获取到的相位,也可能是读写器获取到的相位加或减π。本文为了消除这种歧义,取0-π范围内的相位作为参考,对读写器获取到π到2π的相位做减π处理。对于这种情况进行仿真得到如图3所示的结果。由上述仿真结果可知,存在出入行为的RFID标签,其相位差具有显著的特征。
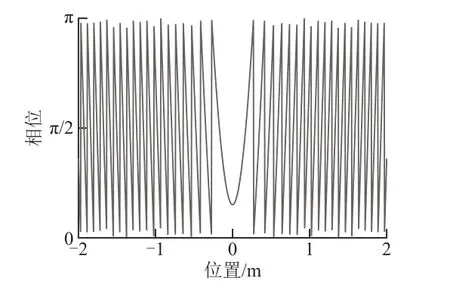
图3 读写器采集到的RFID标签相位与位置关系
然而,在实际应用场合中,一方面,用户携带的RFID标签往往不会只有一个;另一方面,RFID出入管控设备周边可能会存在干扰标签。由于读写器对多标签的识读不是并行的,各个RFID标签之间存在竞争关系,多标签的存在将直接影响RFID出入管控设备对每一个标签的识读效率。随着干扰标签数量的增加,采集到各标签的相位信息在时间上变得不连续,相位的特征变得不明显,这对基于相位特征的数据清洗方法将产生很大的影响。
2.1.2 无出入行为的RFID标签相位特征分析
无出入行为的RFID标签通常是RFID出入管控设备周边的标签,通常是静止的或者是由于与RFID出入管控设备距离较远,所以相对RFID出入管控设备运动速度较小。在通道上无出入行为时,读写器采集到的这种标签的相位较为稳定或者变化很小。但是由于周边环境的微小扰动及RFID出入管控设备的相位测量误差,相位数据始终存在较小的波动。当通道上发生出入行为时,若贴有出入标签的载体及载体携带者(如人、叉车等)经过了RFID出入管控设备与干扰标签传播路径上的菲涅尔区时,出入管控设备采集到的干扰标签的相位将发生显著波动;另外,载体及载体携带者也有可能因为反射、衍射等效应对出入管控设备采集到的干扰标签相位产生影响[9]。因此,尽管RFID出入管控设备周边的干扰标签相对RFID出入管控设备没有明显的相对移动,干扰标签的相位在通道上发生出入行为时仍会受到有出入行为的携带者或载体的影响而产生波动。因为贴有标签的载体以及载体携带者对RFID标签和出入管控设备之间电磁波传播路径的影响都是比较连续的,所以干扰标签的相位波动都是简单的起伏或者突变且持续时间较短。干扰标签的相位也有可能是存在波动的,增大了区分出入标签和干扰标签的难度。下面提出一种方法对干扰标签做过滤处理。
2.2 干扰标签过滤方法
通过前面分析可知,出入标签和干扰标签相位上存在很大的不同:由于RFID出入管控设备采集到相位的周期性,在出入标签相位的两个周期相接处会出现一个相位突变的边沿,且该边沿在出入标签相对出入管控设备每移动四分之一波长(约8.1 cm)就会出现一次,在出入标签经过出入管控设备的整个过程将出现很多的相位突变边沿;而干扰标签由于没有稳定地相对于出入管控设备移动,虽然其相位有波动也有可能出现边沿,但其边沿数量、边沿的跨度都会与出入标签产生明显区别。同时,出入标签在边沿方向上有先出现上升沿再出现下降沿的特点。基于这一特点设计如下方法对无出入行为的多读标签进行过滤,具体算法代码如下:

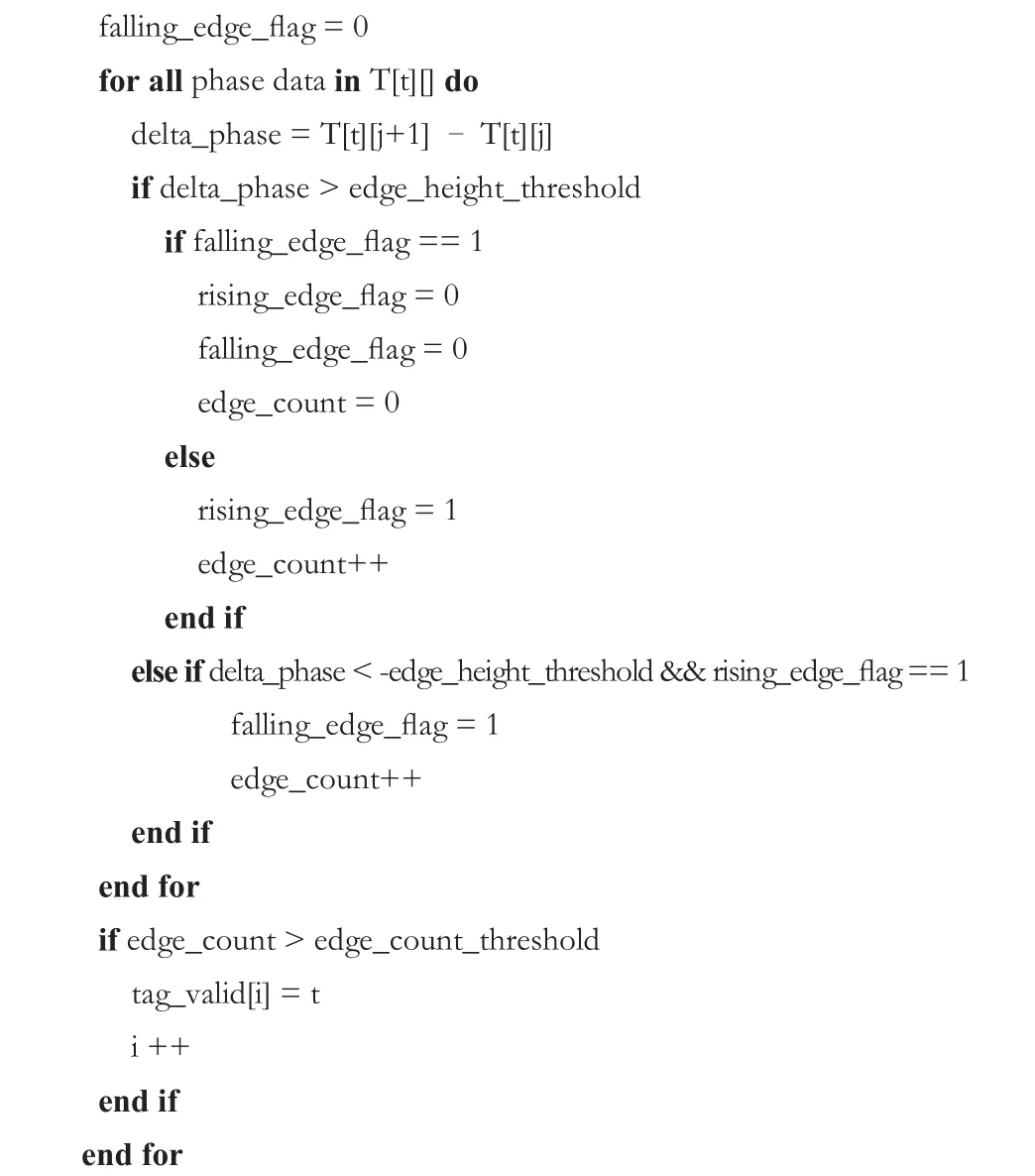
上述算法利用相位突变的幅度和方向来区分出入标签和干扰标签。算法中引入了两个阈值edge_height_threshold和edge_count_threshold。edge_height_threshold表示算法检测边沿的变化量阈值,当某标签前后两个采样点差值的绝对值大于该阈值时,算法将对该边沿的方向进行判断。如果在处理过程中出现上升沿晚于下降沿的现象,则清空之前关于边沿的记录;如果没有出现上升沿晚于下降沿的现象,则当前边沿被判定为有效。edge_count_threshold是边沿数阈值,如果RFID出入管控设备识读过程中获取到的有效边沿数大于edge_count_threshold,则该标签被判定为出入标签,反之则被判定为干扰标签。
3 实 验
实验设备选取的是基于Impinj R2000射频芯片读写器的出入管控设备,如图4所示。

图4 出入管控设备
本设备安装有热红外传感器用于提前感应到出入事件,开启其上的RFID读写器进行盘点,并判断出入事件结束,控制其上的RFID读写器结束盘点。当设备得知出入事件结束后,即可将盘点得到的所有数据送入本文设计的算法中进行数据清洗,最终将有效的数据传给后台程序处理并显示在设备的屏幕上。另外,该设备上有两侧红外线传感器用于判断出入的方向即物品是被带入管理区域还是带出了管理区域。该出入管控设备内置的超高频RFID读写器的性能参数见表1所列。
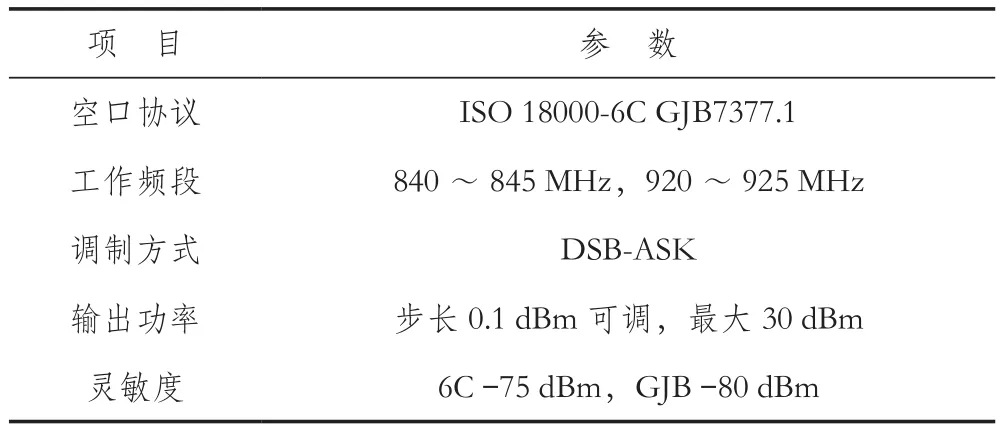
表1 超高频RFID读写器性能参数
本设备的RFID天线增益较大,能够保证对出入标签识读的准确性,但是由于天线增益较大,很容易将周边环境中的无关标签纳入辐射范围之中,导致多读现象。
实验中将RFID出入管控设备的读写器配置为ISO 18000-6C工作模式;为了排除不同频率下读写器电路、标签电路等其他因素对相位偏移的影响导致测量误差,实验中RFID出入管控设备采用定频工作模式,频点设置为922.625 MHz;为了保证能够正确识读出入标签,功率设置为最大功率30 dBm。
测试选用的RFID无源标签芯片采用的是Impinj Monza R6,该标签符合ISO 18000-6C空口协议,被广泛应用于物品管理领域。为了模拟真实的应用场景,实验中RFID标签被粘贴到A4纸上,并装到档案袋内。
首先测试在环境中存在不同数目干扰标签时出入标签相位的变化情况,实验结果如图5所示。
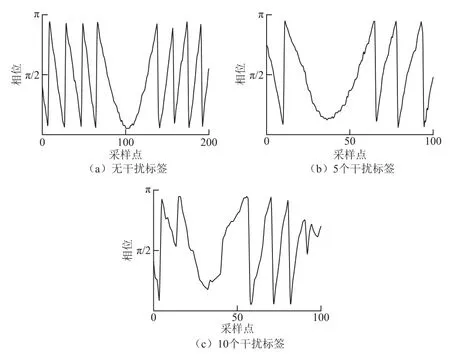
图5 出入标签相位变化情况
由图5可以看出,当环境中没有干扰标签时,出入标签的相位变化情况与图3的仿真结果基本一致;当环境中存在5个干扰标签时,由于干扰标签的存在,出入管控设备采集出入标签信息的效率降低,采样点变少,但是出入标签的相位仍明显具有图3所示特征;干扰标签数增加至10个时,出入管控设备采集效率进一步降低,出入标签相位数据变得不连续,特征变得不明显,与前文分析相符合。
环境中干扰标签在出入管控设备中有出入行为时的相位变化情况如图6所示。
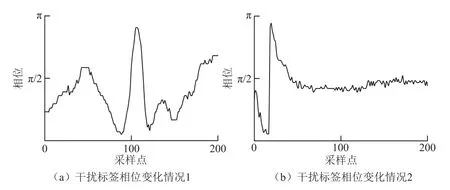
图6 干扰标签的相位变化情况
图6给出了干扰标签在出入管控设备中有出入行为时相位变化的两种情况。当出入行为产生的影响不足以使干扰标签相位达到下界0或者上界π时,干扰标签的相位变化情况表现为较为平缓的上下起伏,如图6(a)所示;当出入行为产生的影响使干扰标签相位达到了上界0或者下界π时,由于相位的周期性,干扰标签的相位会陡然上升或下降,如图6(b)所示,这种上升或者下降的边沿将会对本文提出方法的有效性产生挑战。
在出入管控设备两侧2 m范围内随机布置若干干扰标签,测试者手持单个RFID标签以正常步速匀速通过通道,针对不同数目干扰标签、阈值edge_height_threshold和edge_count_threshold分别进行100次实验,当出入管控系统既没有少读出入标签也没有多读干扰标签即认为本次实验出入管控准确。实验结果如图7所示。
由实验数据可知,无干扰标签时,随着阈值edge_count_threshold和edge_height_threshold增大,准确率逐渐降低,这是因为两个阈值的增大都会导致算法判定标签有效的条件变得苛刻。当两个阈值大到一定程度时,出入标签的相位特征也不能满足算法的要求,严重影响出入管控的准确率。
当环境中存在干扰标签时,若阈值edge_height_threshold较小,因为干扰标签的存在和读写器的识读效率降低,导致对标签相位信息采样不连续而出现的一些边沿会被算法判定为有效,进而导致干扰标签被判定为出入标签的多读现象发生,使出入管控准确率显著降低,这种现象在edge_count_threshold较小时更容易出现;当阈值edge_height_threshold较大时,同样会因为识读效率降低引起采样不连续,进而导致无法采集到完整的相位变化边沿,而将出入标签误判为干扰标签,这种现象在edge_count_threshold较大时更易出现。同样,阈值edge_count_threshold过小,会使得因采样不连续产生的边沿恰巧满足被判定为出入标签的条件,这种现象在edge_height_threshold较小时更容易出现;而edge_count_threshold过大则会因为对出入标签相位采样的不连续而导致其有效边沿数量不能满足条件而被判定为干扰标签,这种现象在edge_height_threshold较大时更容易出现。edge_height_threshold和edge_count_threshold相互影响,两个阈值既不能过大也不能过小。当环境中干扰标签数量增大时,相位采样的不连续性逐渐增强,出入管控的准确率逐渐下降,如图7所示,当环境中存在10个干扰标签时,实验中能达到的最大准确率为92%(edge_count_threshold=4,edge_height_threshold=π/4),实际上92%的准确率在实际出入管控系统应用中仅仅是勉强可用,参考行业相关标准,出入管控系统的管控准确率要在95%以上为良好。
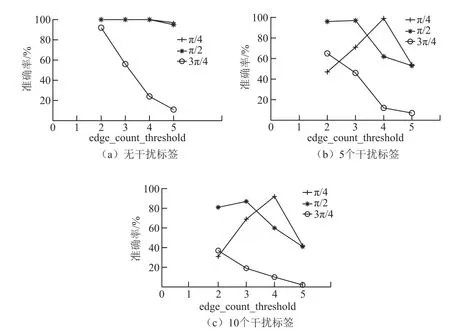
图7 出入管控设备管控准确率
从实验结果来看,本文提出的方法中两个阈值edge_height_threshold和edge_count_threshold的设置是影响出入管控系统管控准确率的关键。对于实验中采用的出入管控设备,edge_height_threshold=π/4,edge_count_threshold=4的阈值设置能够达到最佳效果,在出入管控设备周边存在10个以内干扰标签时,采用该阈值配置能够达到92%以上的准确率。相比于准确率直接受干扰标签影响的常规出入管控设备,采用了本方法的出入管控设备能够有效滤除多读的干扰标签数据。
4 结 语
本文针对RFID出入管控设备的应用中常遇到的多读问题提出了一种数据清洗方法。该方法利用有无出入行为的RFID标签信号的相位特征有显著区别这一特点,将未发生出入行为的标签数据滤除。经实验验证,当环境中存在10个以内干扰标签时,采用该方法的出入管控设备管控准确率达到92%以上;当环境中存在5个以内干扰标签时,准确率能够达到97%以上,具有实用价值。但是,在一些要求严格的场合,出入管控设备的管控准确率应达到99%以上,本文方法无法满足;同时,在部分应用场合可能涉及大量标签的出入行为,本文提出的方法的性能对于出入标签和干扰标签总数量较为敏感,不能满足需求。本文方法证明了相位信息对于出入管控设备的数据清洗具有很高的利用价值。如果将相位信息与一些更为复杂的方法相结合一定能取得更好的效果。
猜你喜欢
医学食疗与健康(2021年27期)2021-05-13
车迷(2018年11期)2018-08-30
中国交通信息化(2018年5期)2018-08-21
海峡姐妹(2018年3期)2018-05-09
公民与法治(2016年10期)2016-05-17
计算机工程(2015年8期)2015-07-03
中国交通信息化(2014年4期)2014-06-05
北京航空航天大学学报(2013年6期)2013-12-19
电子科技大学学报(2011年3期)2011-02-10
现代电子技术(2009年6期)2009-05-31
