仿猫月球着陆缓冲机构设计与缓冲特性研究
2022-11-17 02:03:12陈金宝董自瑞袁英男朱锦耀
宇航学报 2022年10期
王 宸,陈金宝,董自瑞,陈 姮,袁英男,朱锦耀
(1. 南京航空航天大学航天进入减速与着陆技术重点实验室,南京 211100;2. 上海卫星装备研究所,上海 201109;3. 中国人民解放军陆军工程大学野战工程学院,南京 210001;4. 上海卫星工程研究所,上海 201109)
0 引 言
在未来月球多点、多次极区探测与无人科考站建设任务中[1],着陆器面临月表坡度大、陨石与凹坑随机耦合、月壤承载力学特性离散[2]等严酷环境,需要对多种装备进行多次月面软着陆投放[3]。而现有嫦娥系列着陆器,利用铝蜂窝材料压溃变形,进行一次性、被动式缓冲吸能,存在受力不易控制、阻尼性能不稳定、铝蜂窝变形后不可恢复等局限性,难以满足多种探测器与设备的多次、低冲击安全着陆要求。因此,必须突破主动着陆方法,开展刚度与阻尼可控的主动式着陆缓冲器研究,进而研制缓冲曲线平稳、可多次重复使用的月球着陆缓冲机构[4]。近十余年来,磁流变缓冲器的优良缓冲吸能特性受到了学术界和工业界的广泛关注,许多研究人员尝试将其应用于飞行器缓冲机构设计之中。磁流变缓冲器是一种半主动控制缓冲器,通过控制缓冲器内部线圈中的电流强度来调节磁流变液所处的磁场强度,可在毫秒时间内改变缓冲器内部磁流变液的流变特性,从而实现对缓冲力的主动控制[5-6]。
着陆器的构型决定了缓冲器的作用效率,是着陆缓冲机构的核心研究内容之一。传统的着陆缓冲机构形式相对单一,其构型主要为倒三角式和悬臂梁式两类[6]。如图1所示,倒三角式着陆腿的主支柱和辅助支柱在靠近足垫的位置相连,主、辅支柱均为主要的缓冲支柱,均承受轴向力和弯矩的作用。该组合方式存在容易发生构件干涉、展开半径不大的缺点[7]。悬臂梁式着陆腿的辅助支柱在主支柱中部的外筒下端与主支柱用万向节连接,其中主支柱为主要缓冲支柱承受轴向力和弯矩,结构较为粗大,质量也较大,主要用于缓冲垂向冲击能量;而辅助支柱仅承受轴向力,结构较小,主要用于缓冲水平冲击能量[8-9]。若垂直于轴向的冲击过大,主支柱会发生弯曲变形,上下套筒之间会出现卡死现象[10]。针对现有倒三角式和悬臂梁式构型的局限性,越来越多的学者开始关注于新型着陆缓冲机构的研究,通过仿生学手段进行着陆缓冲机构的设计,将仿生设计技术应用到着陆器的设计中。

图1 典型着陆腿构型Fig.1 Typical landing legs
罗世昊等[11]结合蝗虫腿部的结构特点,设计了一种新型的缓冲着陆机构,并分析了蝗虫腿式机构参数与机构缓冲性能间的关系。但其仿生构型设计仅停留于蝗虫形态仿生,研究其腿部尺寸与比例,模仿其构型,并通过铝蜂窝缓压溃变形,进行被动式缓冲。顾海涛等[12-13]模仿猫科动物的腿部骨骼与肌肉结构,利用气动肌肉作为主要吸能材料,设计了一种仿猫科动物着陆缓冲机构,并分析了猫关节角度、气动肌肉长度与着陆性能之间的关系。其所采用的气动肌肉缓冲方式在月表高低温、真空环境下具有诸多局限,难以进行工程应用转化。袁英男等[14]分析了家猫的尺寸和跳跃缓冲特性,以关节制动器为缓冲吸能原件,设计了一种仿猫着陆缓冲机构,该着陆缓冲机构具有良好的缓冲性能。但所采用关节电磁制动器的缓冲方式吸能效率较低。
综上所述,现有基于仿生学方法设计的月球着陆缓冲机构均局限于形态仿生,难以发挥其生物原型的优异性能,仍具有诸多局限,难以用于未来月球探测。本文通过开展不同高度的猫跳实验,探究猫着陆过程中的前/后腿吸能贡献比与内在缓冲机理。基于猫前/后腿的形态尺寸比例和缓冲特性,提出了一种仿猫月球着陆缓冲机构,采用磁流变液缓冲器作为变刚度缓冲元件进行主动控制式的缓冲吸能。最后,通过着陆动力学仿真分析,将所提出的仿猫着陆器与嫦娥系列着陆器进行了着陆性能对比,验证其着陆性能与仿生方法合理性。结果表明,所提出的仿猫月球着陆器具有更为出色的着陆性能,并与猫跳落着陆动力学实验机理基本吻合。
1 猫着陆缓冲特性分析
神经生物学研究表明,腿式动物可通过控制神经系统与肌肉骨骼结构(即肌肉和身体)之间的相互作用来调节腿部刚度[15-17],进而适应复杂地表环境,从而实现各类自适应运动[18-19]。猫科动物在自然界经过数千万年的进化,其具备身体构造良好的奔跑和跳跃的能力[20],是研究腿式动物肢体与本体关系的绝佳模型[21]。猫凭借出色的着陆缓冲能力和冲击衰减能力,可以毫无损伤地从高空跳下后安全着陆[22]。即使从高楼意外坠落,仍具有很高的存活率[23]。猫科动物的优越跳跃着陆缓冲性能,以及良好的跳跃抗冲击策略,为指导未来月球着陆缓冲装置的设计与改进提供了重要生物启发[24]。
1.1 家猫高台跳落实验
本实验选取一只3.5 kg的2岁成年家猫,通过食物引诱等方式,使其从0.8~2.0 m之间的不同高度(为保证实验的客观合理性,采用0.2~0.4 m交叉间隔)的测试平台跳下,通过高速录像机记录其跳跃着陆过程中的姿态变化;并利用安装于着陆地面的测力板测量其触地冲击力。实验平台如图2所示,所用Bertec地面测力板的具体参数如表1所示[14]。
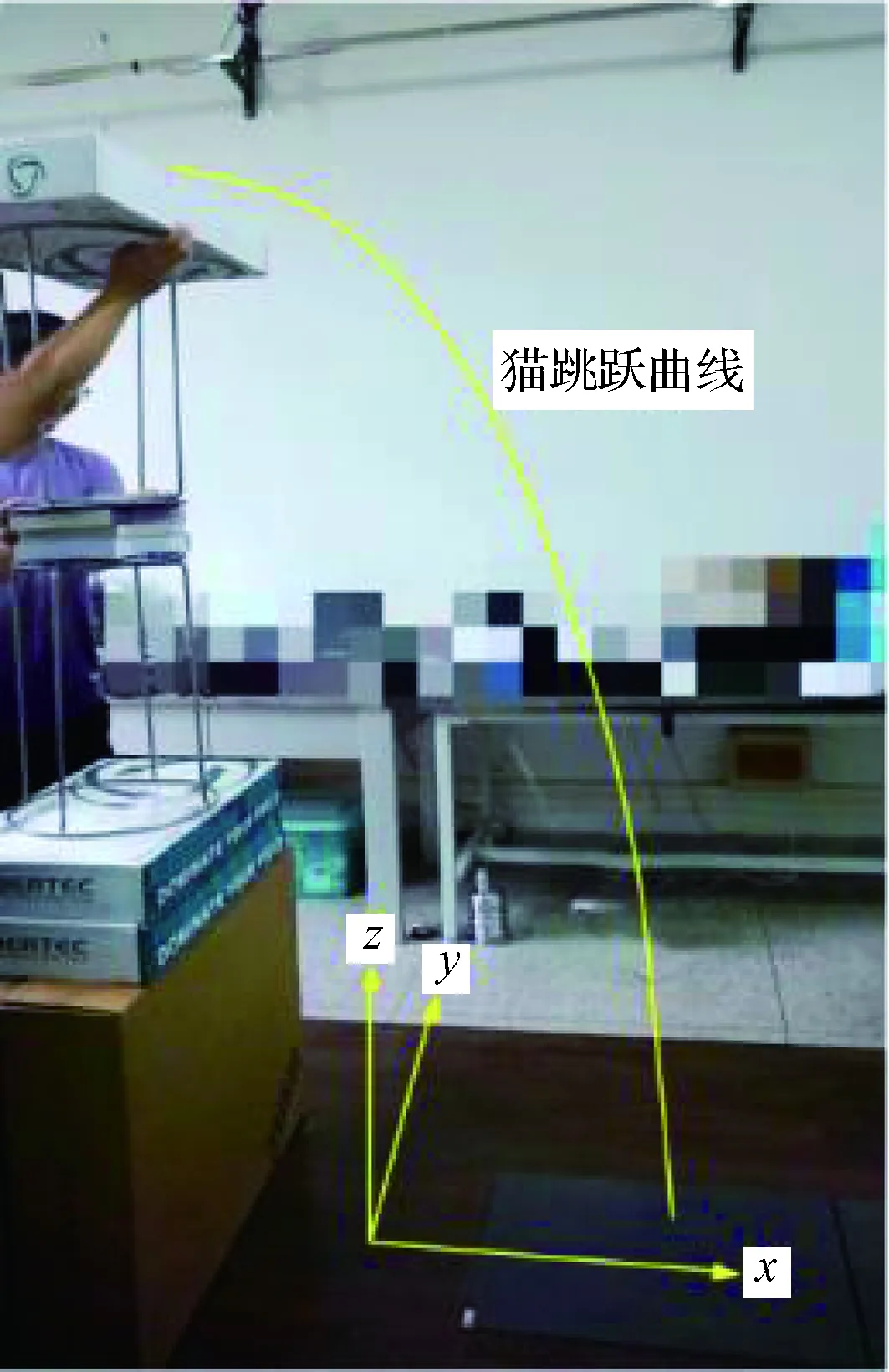
图2 猫跳实验平台Fig.2 Cat jumping experiment platform
如图3所示,根据0.8 m, 1.4 m和2.0 m三个高度的跳落实验,对猫跳落后触地缓冲姿态进行实验录像分析:(1)在猫在空中自由落体阶段,其前后肢完全舒展,增加空气阻力,减小部分下落动能;(2)其次,猫前腿首先触地,腕关节、肘关节和肩关节形成一个耦合缓冲系统,进行缓冲第一阶段的缓冲吸能;(3)猫以两条前腿为支撑,其身体围绕前腿旋转,此时,猫的部分冲击能量转化为身体与四肢的动能,分担部分前腿触地冲击所吸收的能量;(4)再其次,猫对身体与四肢的姿态进行迅速调整,弯曲背部,将冲击能量部分转化为身体于四肢的弹性势能;(5)猫后腿触地,吸收冲击能量;(6)最后,猫身体逐渐舒展恢复,伸直其弯曲的身体躯干,将身体与四肢的弹性势能转化为水平动能。

表1 Bertec三维测力台主要参数Table 1 Parameters of the Bertec 3D force-measuring sensor
在低高度(0.8 m)时,着陆触地前猫的全身姿态更为舒展,前腿与后腿之间的距离较大;随着高度的增加(2.0 m),猫触地前的瞬间时刻,猫身体躯干和四肢更为紧凑,其前腿与后腿间距更近,以便于在前腿触地吸能后,后腿能够迅速触地进行缓冲吸能。

图3 0.8 m, 1.4 m和2.0 m平台猫跳落着陆姿态对比Fig.3 Landing attitudes of cat jumping from heights of 0.8 m, 1.4 m and 2.0 m
1.2 跳落实验缓冲特性分析
在完成对猫跳落着陆姿态分析之后,依据地面测力板测得的力-时间数据和高速录像中前后腿触地时间,对猫触地着陆后的前/后腿所受冲击力数据进行分析。由于猫触地着陆过程中,其前/后腿缓冲力处于瞬时动态变化状态,将前/后腿缓冲力对触地时间积分获得猫前/后腿缓冲能量,分析猫着陆缓冲过程中其前/后腿缓冲吸能的贡献比。
P=IF+IH
(1)
(2)
式中:P为初始总动量;IF和IH分别为前/后腿冲量;m为猫质量;h为平台高度;tF为前腿触地时长;tH为后腿触地时长。
依据式(2)计算不同平台高度下,猫触地瞬间其前/后腿所吸收冲量及占比如图4所示。从图中可以看出,随着跳落高度的增加,猫的初始着陆时刻的总动量也随之增加,而其前腿在着陆触地瞬间所受冲量基本保持不变,其后腿在着陆触地瞬间所受冲量则随高度的增加而逐步提升。此外,由后腿所受冲量与猫总动量比值曲线可以看出,在不同高度猫跳落着陆过程中,其后腿所吸收的冲量均超过50%,且随着初始跳跃高度提高逐步增加,最终稳定在70%左右。
结合高速录像机所拍摄的猫跳跃着陆姿态与地面测力板所测得的前/后腿触地冲击力数据,综合分析可以看出,在猫跳跃着陆过程中,其触地前身体与四肢姿态控制、前/后腿触地时序调节及其运动学状态对着陆缓冲吸能均有重要贡献。因此,在猫身体与四肢生物学尺寸与缓冲力学特性分析的基础上,开展仿猫着陆缓冲机构研制时,应分别对猫前/后腿进行仿生构型设计,探究其前/后腿尺寸与缓冲功能差异,并采用非对称构型着陆腿组合形式,提升月球着陆器的着陆缓冲性能。

图4 不同高度猫触地前后腿冲量图Fig.4 Impulses of the front and rear legs of the cat jumping from different heights
2 仿猫着陆腿构型设计
猫下肢运动是由骨骼肌牵引骨骼所产生,其运动具有灵活、高效性[25-26]。从力学分析的角度,猫腿部肌肉可以视作缓冲器,衰减力学能量,降低着陆过程猫身的过载;猫的前/后腿均具有羽状肌肉束和长肌腱,可吸收着陆时的瞬间冲击载荷;长肌腱可以对冲击载荷进行有效衰减,保护腿部肌肉在着陆过程中免受快速强力拉伸的伤害。
如图5所示,以猫的后腿骨骼和肌肉系统为例,其后腿主要包括股骨、胫骨、跖骨三个主要骨骼结构,以及腓肠肌和跟腱两个主要肌肉[20]。腓肠肌是小腿腹部上的大肌肉,为平梭形,有外侧和内侧两个骨骼连接点,外侧连接点起源于胫骨近端后部,内侧连接点起源于股骨的内侧,其两个连接点在胫骨上部联合起来,肌肉迅速变窄,成为跟腱的一部分[27]。跟腱在猫的跑动与跳跃过程中起着极为重要的作用,相当于与弹簧相类似的缓冲元件,在运动过程中进行储存与释放能量[28]。
依据对家猫高台跳跃实验的前/后腿缓冲贡献分析结果,对仿猫月球着陆器进行非对称构型设计。如图5所示的猫腿部肌肉骨骼结构,以猫前/后腿为仿生对象[20],结合本实验中家猫的形态尺寸比例和质量分布规律,对着陆器的前/后腿式缓冲机构进行设计,具体参数如表2所示。

图5 猫后腿肌肉系统及仿生机构设计Fig.5 Muscular system of cat rear leg and its equivalent mechanism
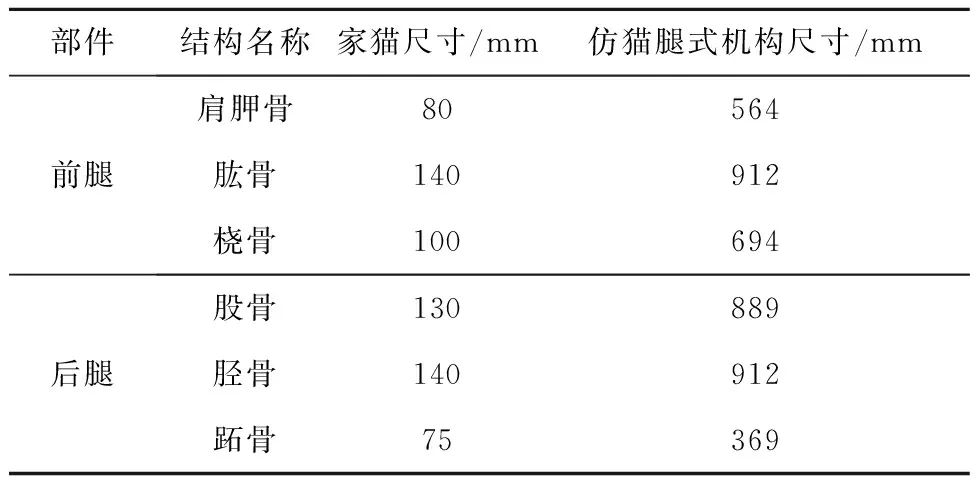
表2 本实验家猫与仿猫腿式缓冲机构尺寸[29-30]Table 2 Parameters of the cat and the cat-inspired buffering mechanism[29-30]
以后腿缓冲机构仿生设计为例,通过对家猫腿部特征和实验的录像分析,其着陆过程中,主要通过腓肠肌和跟腱的变刚度调节进行缓冲吸能。因此,在仿猫腿式缓冲机构设计中,采用磁流变缓冲器作为变刚度缓冲元件进行缓冲力控制,模拟猫前/后腿的肌肉。磁流变缓冲器利用磁流变液的流变效应进行工作,在着陆过程中通过施加小的电流,将缓冲器中的磁流变液从液态变成半固态,提高其屈服应力,从而实现缓冲力控制。磁流变缓冲器具有体积小、液体的屈服应力能够连续变化且过程可逆、缓冲后可以恢复等优点,并且可以根据实际的着陆情况对阻尼力进行控制,具有很高的可靠性。
如表3所示,参考中国嫦娥系列着陆器主支柱缓冲力,设计了各缓冲元件刚度。中国嫦娥系列着陆器由两段不同强度的铝蜂窝组成,其中弱蜂窝压溃力FM1=15 kN,行程LM1=150 mm;强蜂窝压溃力FM2=22 kN,行程LM2=220 mm。弱蜂窝完全压溃时可吸收2250 J能量,强蜂窝完全压溃时可吸收7090 J能量,其铝蜂窝力学性能如图6所示[6]。所提出的仿猫月球着陆器整体构型如图7和图8所示。

图6 中国嫦娥系列着陆器主支柱力学性能Fig.6 Mechanical properties of the primary strut of Chang’e landers
本文提出的仿猫月球着陆器由四套着陆缓冲机构构成,两套着陆腿以猫前腿为仿生对象进行设计,每套着陆腿由肩胛骨、肱骨和桡骨三段构成,分别包含变刚度缓冲元件FS和FD。另外两套着陆腿以猫后腿为仿生对象进行设计,每套着陆腿由股骨、胫骨和趾骨三段构成分别包含变刚度缓冲元件HS和HD。通过八个变刚度缓冲元件模拟猫前/后腿的肌肉组织,将着陆器动能Ek转化为缓冲元件弹性势能Ep,并最终以磁流变液的热能耗散掉。其能量转化关系如式(3)所示,当着陆器竖直速度vz<0时,对各磁流变缓冲器施加控制电流,增加其屈服应力,控制缓冲器整体等效刚度进行缓冲;当着陆器竖直速度vz≥0时,停止电流控制,使缓冲器整体等效刚度为0,停止缓冲。

表3 各变刚度阻尼元件与猫腿部肌肉关系Table 3 The relationship between each variable-stiffness damping element and cat leg muscles

图7 仿猫月球着陆器正视图Fig.7 Front view of the cat-inspired lunar lander

图8 仿猫月球着陆器斜二轴测图Fig.8 Oblique two-axonometric view of the cat-inspired lunar lander
Ek=Ep
(3)
(4)
(5)
式中:Ek为着陆器动能;Ep为变刚度缓冲元件弹性势能之和;mL为着陆器质量;ki为第i个缓冲元件刚度;Δxi为第i个缓冲元件行程。
3 着陆缓冲仿真分析
3.1 仿猫构型与传统构型着陆器仿真对比
分别建立主动式仿猫着陆器与被动式嫦娥系列传统构型着陆器动力学仿真模型,对其进行着陆缓冲性能对比分析。两种着陆器仿真模型如图9和图10所示。着陆器整体质量设置为1350 kg,初始竖直速度vz为-3800 mm/s[31],着陆器与月面之间的接触力学参数如表4所示。

图9 仿猫着陆器仿真模型及坐标系定义Fig.9 Model and coordinate system of the cat-inspired lunar lander

图10 嫦娥系列传统构型着陆器仿真模型Fig.10 Model of the Chang’e landers
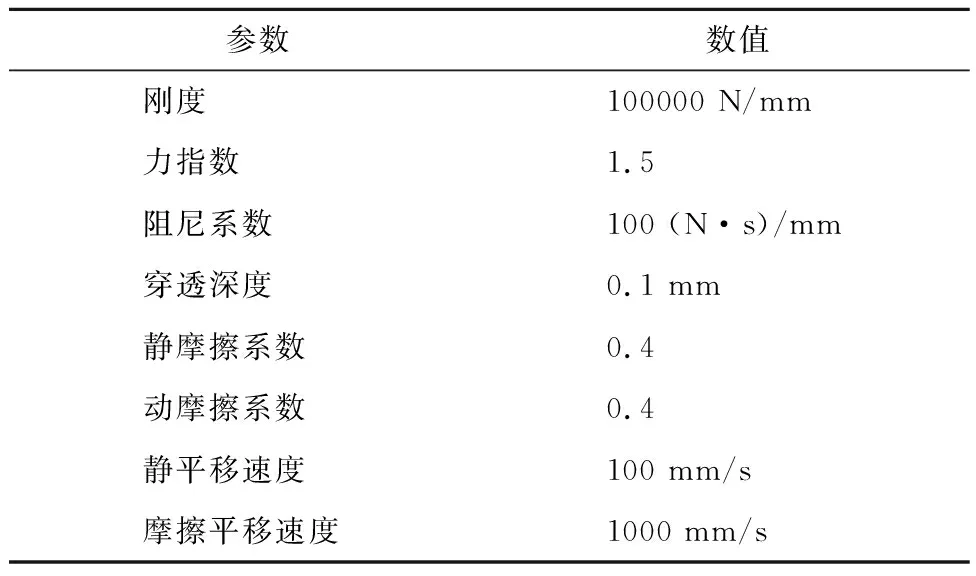
表4 着陆器与月面接触力学参数设定Table 4 Mechanical parameter of the contact between the lander and lunar surface
机体最大加速度是月球着陆器的重要评价指标,若加速度过大,可能造成搭载设备与仪器损坏[32]。如图11和图12所示,嫦娥系列传统构型着陆器在0.01 s左右,四腿同时触地,其机体加速度达到最大,约为53942 mm/s2,整个着陆过程仅通过弱蜂窝压溃缓冲吸能,强蜂窝未被压溃,因此,其机体加速度仅出现一次阶跃上升。在0.08 s左右,着陆器减速到0,铝蜂窝不再被压缩,其机体加速度呈台阶式下降为0。仿猫月球着陆器机体速度在0.15 s 左右减速到0,其着陆缓冲时间更长,速度-时间曲线也更为平稳,有效降低了机体过载。其加速度-时间曲线随时间呈波动上升趋势,其最大加速度出现在0.14 s左右,约为44097 mm/s2,相比于嫦娥系列传统构型着陆器其最大加速度降低了18.3%,其缓冲力曲线也更平稳。由仿真结果可以看出,所提出的仿猫月球着陆器能够在稳定着陆的同时,更好地保护设备与仪器,保证探测任务的顺利进行。

图11 着陆器速度变化曲线Fig.11 Curves of the lander’s velocity

图12 着陆器加速度变化曲线Fig.12 Curves of the lander’s acceleration
3.2 仿猫着陆器缓冲特性仿真分析
主动式仿猫着陆器四套着陆腿的八个变刚度缓冲元件缓冲力-时间曲线如图13所示。从图中可以看出,0.013 s左右,四套着陆腿同时触地,八个变刚度缓冲元件均开始提供缓冲力。其两套前腿的两个变刚度缓冲元件F1S/F2S和两套后腿的变刚度缓冲元件H1S/H2S相比于F1D/F2D和H1D/H2D所提供缓冲力更小。
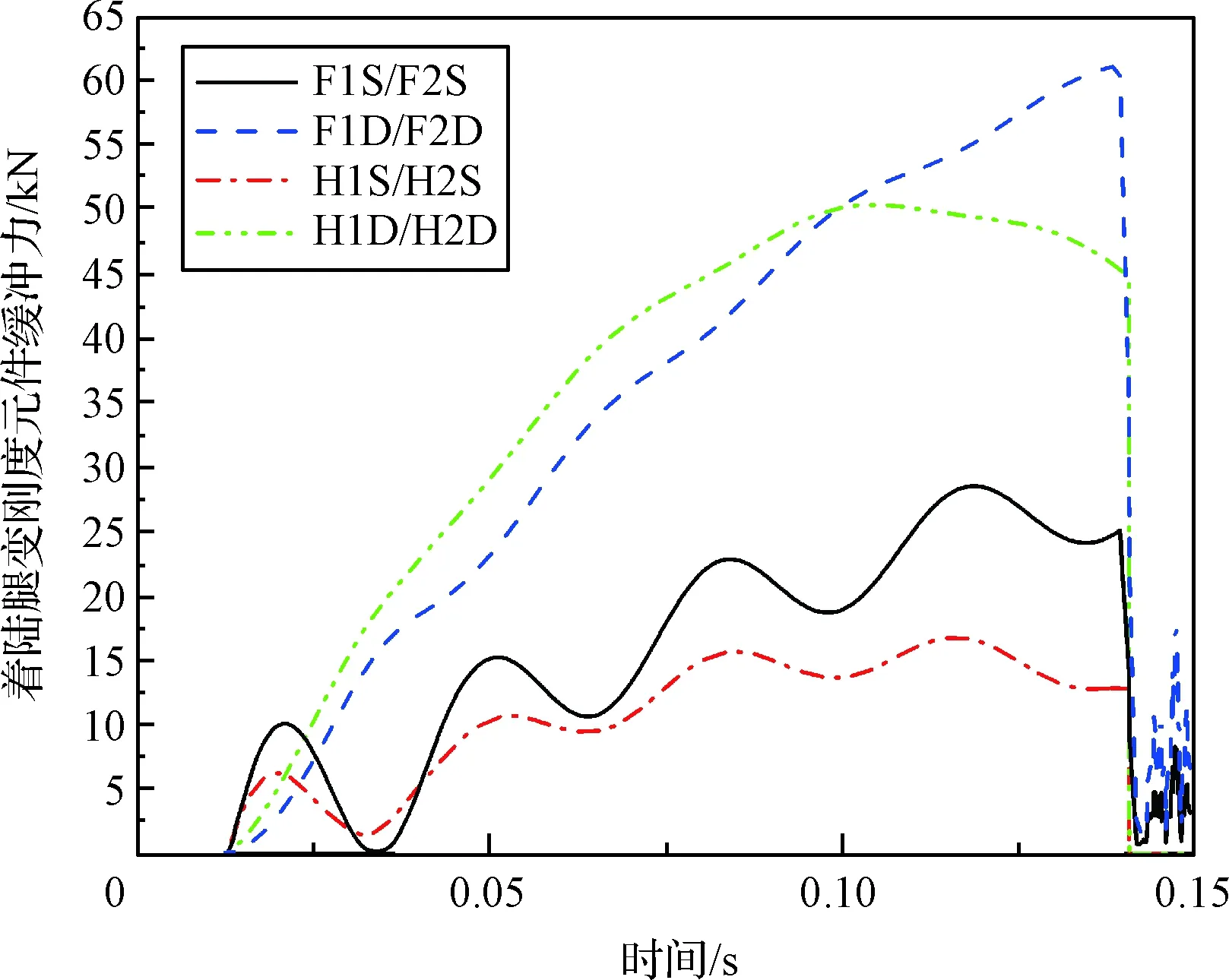
图13 着陆器各变刚度缓冲元件缓冲力Fig.13 Damping force of the variable-stiffness buffers
仿猫着陆器四套着陆腿的八个变刚度缓冲元件的缓冲行程-时间曲线如图14所示,在着陆缓冲过程中,变刚度缓冲元件F1S/F2S和H1S/H2S处于拉伸状态,其行程约20 mm。变刚度缓冲元件F1D/F2D和H1D/H2D处于压缩状态,前腿缓冲元件F1D/F2D随着陆缓冲的进行,其压缩行程逐渐增大,最终达到为88.04 mm;而后腿缓冲元件H1D/H2D在着陆缓冲过程中,先受到压缩,在0.104 s左右,达到最大压缩行程71.45 mm,随后开始逐渐拉伸。
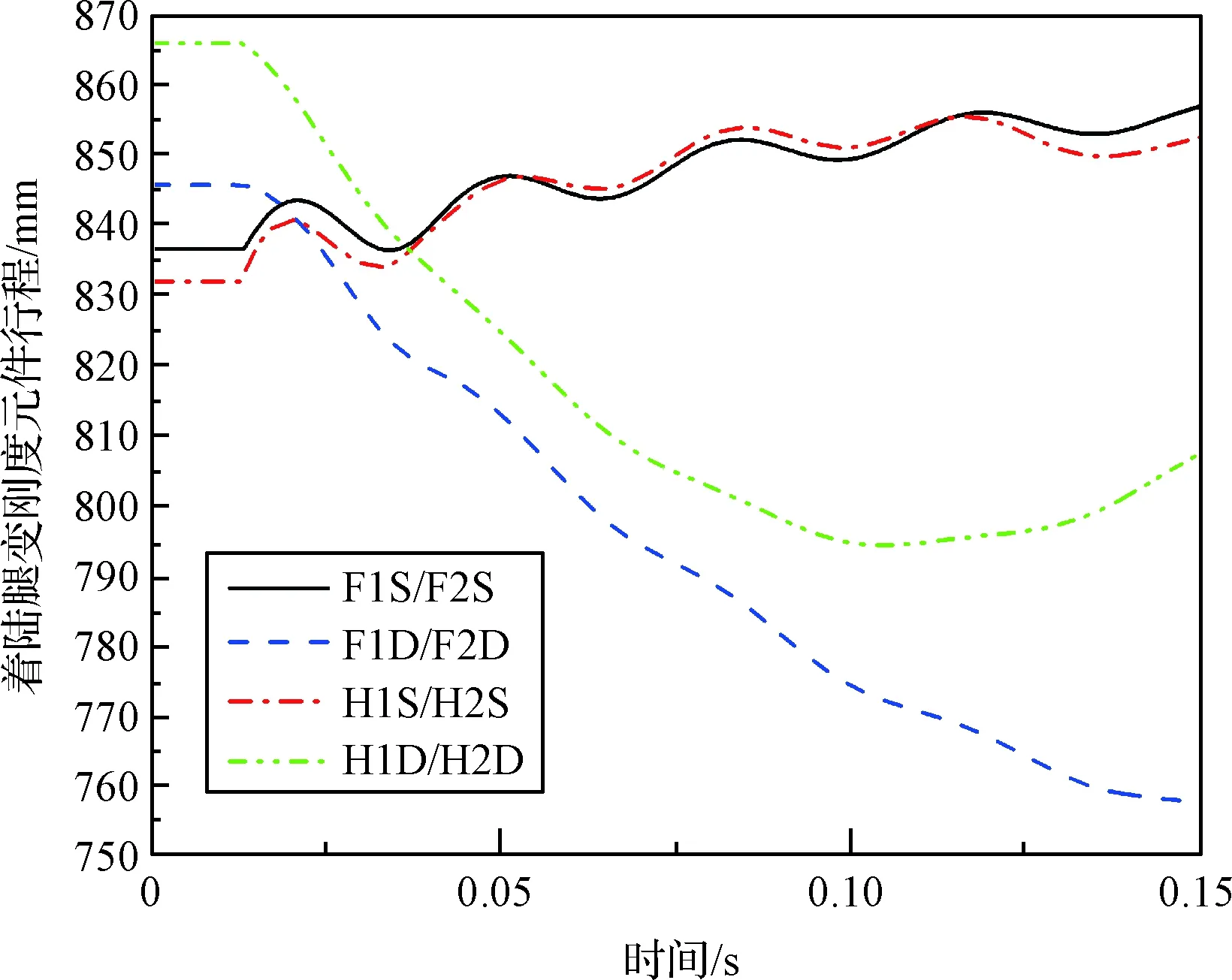
图14 着陆器各变刚度缓冲元件行程Fig.14 Strokes of the variable-stiffness buffers
通过仿猫月球着陆器前后腿的触地冲量进行分析,得到着陆过程中其前后腿缓冲贡献度如图15所示,其前腿缓冲吸能贡献约为40%,后腿缓冲吸能贡献度约为60%。这与家猫高台跳落实验结果基本吻合,验证了基于猫腿尺寸/质量分布和高台跳跃实验的仿猫月球着陆器设计方案合理性。
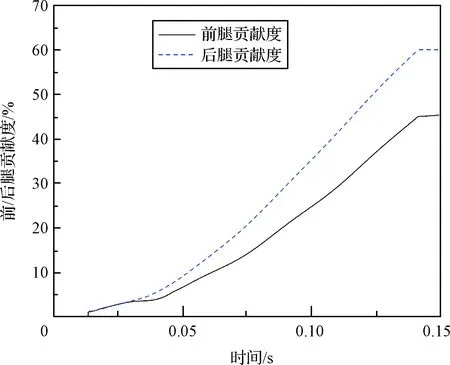
图15 着陆器前/后腿贡献度Fig.15 Absorption contribution of front/rear legs of the lander
4 结 论
结合未来月球探测需求,提出了一种新构型仿猫月球着陆缓冲机构。开展了不同高度平台下的猫跳落实验,对猫跳落着陆姿态、前/后腿触地缓冲力与贡献度进行了分析。实验结果表明,在不同高度猫跳落着陆过程中,猫后腿的缓冲吸能占比更高,且随着初始跳跃高度提高逐步增加,最终稳定在70%左右。依托中国嫦娥三号月球着陆器性能参数与猫形体尺寸、跳落实验数据,提出了一种基于磁流变缓冲器的仿猫月球着陆缓冲机构,并将其与嫦娥系列传统构型着陆器进行了着陆动力学仿真分析对比。仿真结果表明,所提出的仿猫月球着陆器最大机体加速度降低了18.3%,具有更为出色的着陆性能。着陆过程中,其前腿缓冲吸能贡献约为40%,后腿缓冲吸能贡献度约为60%,与猫跳落实验分析结果基本吻合,验证了仿猫月球着陆器设计方案的合理性。本文所提出的仿猫月球着陆缓冲机构解决了现有被动式铝蜂窝着陆器过载大、缓冲力曲线波动大、不可重复使用等难题,可实现月面多次、高效着陆。
猜你喜欢
船海工程(2023年2期)2023-04-27 13:07:20
青年文摘(2022年13期)2022-12-07 15:23:57
航天器工程(2019年4期)2019-11-11 03:41:00
伙伴(2019年12期)2019-01-17 04:38:56
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48
课外生活(小学1-3年级)(2017年4期)2017-05-22 18:58:18
体育时空·上半月(2017年4期)2017-05-05 03:08:39
东西南北(2017年1期)2017-02-22 18:26:24
中国卫生(2015年6期)2015-11-08 12:02:50
中学科技(2015年7期)2015-07-03 05:44:32