
基于LSTM的地震模拟振动台闭环控制方法
2022-11-16 06:58纪金豹胡宗祥杨森
地震工程与工程振动 2022年5期
纪金豹,胡宗祥,杨森
(北京工业大学工程抗震与结构诊治北京市重点实验室,北京 100124)
引言
结构抗震试验不仅可以验证数值模拟的准确性,还能为结构抗震设计提供可靠的技术支持,对于推动新技术和新理论发展有着重要的作用[1-2]。目前,地震模拟振动台试验已经成为结构动力特性测试、设备抗震性能评估、结构抗震措施检验以及结构地震反应等领域的重要研究手段[3-7]。但振动台试验也有一定的局限性,由于系统非线性影响及其台体与试件的共同作用,振动台本质上是一个十分复杂的非线性系统[8]。为了获得更好的地震波形再现能力,就需要对系统进行补偿,这意味着振动台控制算法的优劣是决定其性能的关键因素。
目前,已有很多学者开展了基于神经网络的智能控制算法研究,也展现了这类算法强大的自适应能力和非线性拟合能力。余士品等[9]利用BP神经网络对振动台的控制指令进行调整以补偿幅值和位移的偏移问题;夏玲琼等[10]将人工神经网络用于振动台的迭代学习控制以及PID控制参数整定;刘燕燕等[11]开展了基于人工神经网络的PID控制参数智能整定研究;刘拓等[12]提出了一种基于卡尔曼神经网络自适应的地震模拟振动台多参量控制策略,提高了波形跟踪的精度;刘业颜等[13]对包含人工神经网络的PID控制在低频振动台中的应用进行了仿真研究;何少佳等[14]提出了一种基于单神经元网络PID和有监督Hebb学习法则的液压振动台智能控制方式,改善了伺服作动器位移偏差大的问题。Benrabah等[15]提出了一种自适应神经网络PID控制器,采用傅立叶级数神经网络(FSNN)对PID控制器的参数进行在线调整,具有结构简单、性能优良等优点。Cheon等[16]提出了一种深度学习控制器,即利用深度信念网络(Deep Belief Network)来学习PID控制器的输入-输出关系,并验证了该控制器的性能和有效性。Gheisarnejad等[17]提出了一种结合了深度确定性策略梯度(DDPG)算法的PID控制器,仿真结果表明强化学习的引入能大幅提高控制器的抗干扰性。事实上,地震模拟振动台的智能控制算法研究仍处于一个初步阶段,现有成果更多的是将神经网络作为辅助工具来改善PID、三参量控制等传统算法的控制性能,并未直接将神经网络作为振动台的控制器。
做为一种深层的神经网络,深度学习具有更强的非线性处理能力。尤其以循环神经网络(RNN)为代表的时间序列深度学习算法,在语音识别和机器翻译等领域展现出巨大的优越性,这是否也意味着RNN具有适用于处理振动台控制这类时序问题的可能性。因此,为了探讨利用深度学习算法进行振动台控制器的实现方式,文中针对振动台三参量闭环控制模型,利用长短时记忆网络(LSTM)对三参量控制算法的输入-输出关系进行学习和仿真,从而构造了性能良好的振动台深度学习控制器。
1 深度学习控制器
1.1 循环神经网络
循环神经网络(RNN)是一类用于处理时间序列问题的深度学习模型,RNN将各层神经元在时间维度上进行展开,通过信息的时序输入实现数据在网络中的前向传递,并将信息保存在“长期记忆单元”中以建立数据之间的序列关系。
如图1所示,权值W、V和U在每个时刻的节点单元处都是共享的,在t时刻隐藏单元St会接受来自St-1和输入Xt的信息并输出Ot,同时将信息St传到下一时刻St+1。这种策略不仅大大降低了网络训练的时间成本和算力需求,也实现了对变步长序列数据的处理。
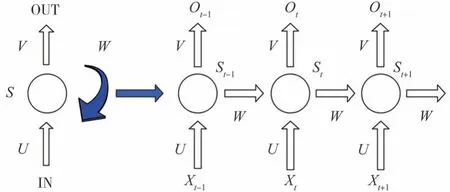
图1 循环神经网络Fig.1 Convolutional neural network

尽管RNN可以考虑信息之间的前后关联,但传统的RNN通常难以实现对信息的长期保存。由于激励函数和连乘的原因,当RNN的网络层数较多或数据时序较长时,有时梯度会随着迭代呈指数级增长或衰减,从而导致梯度消失和梯度爆炸的问题[19]。为解决传统RNN的不足之处,Hochreiter等[20]提出了长短时记忆网络(LSTM),通过在RNN中引入3类门控单元以实现对信息的提取、遗弃和长期保存,这不仅改善了梯度消失和梯度过大的问题,也提升了RNN对于信息的长期储存能力。在这3类门控单元中,输入门的主要功能是控制当前输入数据Xt传入网络的比例;遗忘门用于控制长期记忆单元在经过每个神经元时对信息的舍弃程度;输出门用于控制当前神经元的输出量和传到下一神经元的输入量。
1.2 深度学习控制器原理
传统三参量控制算法通过地震波指令信号、加速度、速度和位移反馈信号的结合实现了对振动台的稳定控制,因此文中所构造的深度学习控制器借鉴了三参量控制的做法。如图2所示,作为振动台控制器时,LSTM需要接受4个信号,包括地震波加速度指令信号、加速度反馈信号、速度反馈信号和位移反馈信号,并直接输出控制信号进入振动台系统。

图2 深度学习控制器Fig.2 Deep learning controller
由于系统输出的反馈信号是实时产生的,LSTM控制器每次处理完一组信号后才能产生下一个反馈信号,所以模型在运行前无法观测到完整序列的反馈信号,这意味着LSTM控制器需要多次运行才能处理完整段指令信号。但是,LSTM的循环结构使其依赖于完整且连续轨迹才能保存记忆,也就是说当控制器需要接收外部的实时反馈信号时,网络的记忆会不断重置,这无法起到“记忆”的作用,LSTM也就退化成了一般的BP神经网络。对此,文中提出了一种基于LSTM闭环控制的实时反馈信号处理方法,即通过单独保存隐层状态“h”和长期记忆状态“c”的方式,从而避免LSTM控制器在不断的重置中丢失过往记忆。
如图3所示,在LSTM接收非连续的反馈信号时,每处理一组输入信号a1和反馈信号af1后,将LSTM内部的长期记忆单元“c1”和隐藏状态“h1”单独保存下来,当接收下一组输入信号a2和反馈信号af2时将“c1”和“h1”也作为输入,从而避免LSTM因多次循环运行而观测不到过往记忆。当接入反馈信号时,LSTM的前向传播可表示为:
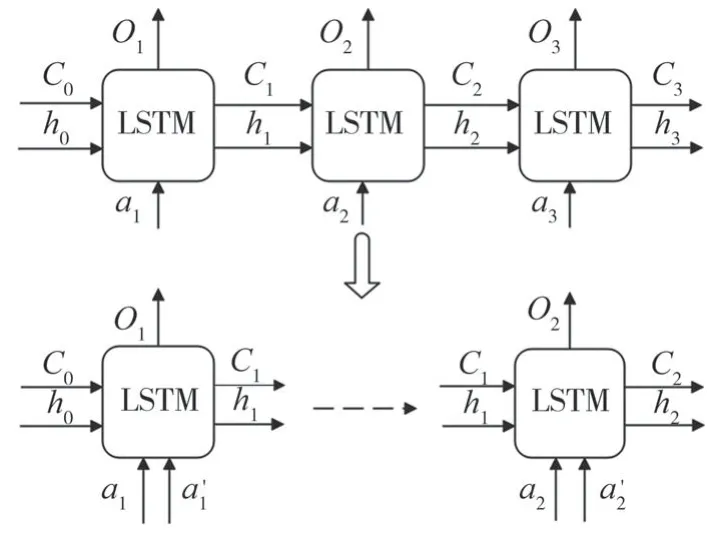
图3 反馈信号处理方法Fig.3 Processing method of feedback signals

2 系统建模
2.1 振动台开环模型及离散化
地震模拟振动台的加速度开环传递函数可以描述为控制指令E与加速度反馈之间的关系,由液压三连续方程推得:

文中对于深度学习控制器的搭建、训练和测试均基于Python软件和Pytorch深度学习框架来实现,因此需对振动台系统进行离散化并移植到Python中。对式(3)进行变换得:

预算管理系统以“经费预算和使用为主线、预算执行和控制为重点,核算和监督为依托,财务分析为评价依据”的管理体系,提升远程报销服务与监督能力。通过院所两级管理预算管理实现预算整体规划、分所下发,各所实现按部门二次分解预算,达到各所按经济科目精细化控制预算的目标;各所领导可以实时掌控预算执行进度及资金流向,院级领导可以纵观全院预算执行,为决策分析做数据支撑。

令z2=Y(n),可得振动台系统的离散公式:

文中仿真以北京工业大学3×3 m水平双向地震模拟振动台的单轴特性为例,确定其参数为:kq=0.017 795、M=6 000、Ap=0.011 9、V=0.003 403 4、β=7×10-8、kc=2.5×10-11,Cc=7.553×10-15。
2.2 三参量控制
作为地震模拟振动台常用的控制算法,三参量控制主要包括三参量反馈和三参量前馈环节。对于整个振动台三参量控制系统,可以通过各部分传递函数进行串联、并联、反馈形成整个系统的传递函数。三参量控制下的系统整体模型如图所示:
图4中,GAC、GVC、GDC分别表示三参量发生器的加速度、速度、位移分量所代表的传递函数,并且包含对应分量的控制增益。Gq表示伺服阀二阶特性,在初步分析中可以假定Gv=1,GT表示振动台开环传递函数,GAf、GVf、GDf分别表示加速度、速度、位移反馈环节的传递函数,并且包含对应分量的反馈增益。经过参数整定,确定其前馈控制增益为:kac=0.0107,kvc=-0.0351,kdc=0.375,反馈控制增益确定为:kaf=-0.125,kvf=0,kdf=0.375。
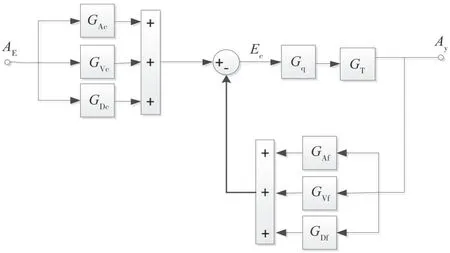
图4 振动台三参量闭环控制模型Fig.4 Three variable closed loop control model of shaking table
3 网络训练
3.1 训练数据生成
通过MATLAB中的SIMULINK模块搭建地震模拟振动台的三参量闭环控制仿真模型,经参数整定保证系统能以较高的精度再现地震波形。随机选取20条地震波作为输入指令信号进行仿真,包括15条天然地震动和5条人工地震动,将其按照6:1:3的比例划分为训练集(12条)、验证集(2条)和测试集(6条)。其中训练集用于模型的监督式训练,验证集用于网络训练完成后的初步验证,并以此作为依据进行超参数的调整,测试集用于网络的最终测试以确定模型的泛化性。如图5所示,对所选20条地震波进行仿真时,采集每条地震波加速度指令信号、加速度反馈信号、速度反馈信号和位移反馈信号作为深度学习控制器的输入信号,采集整个三参量控制器的控制信号作为深度学习控制器的输出标签,采样时间为0.005 s。
3.2 模型搭建
经过对比与测试,最终选用4层网络结构的LSTM模型作为深度学习控制器,包括输入层、两个隐藏层和输出层。其中,输入层设为4个节点(包含1个输入信号节点和3个反馈信号节点),输出层设为1个节点,两个隐藏层分别设为30、60个节点,网络整体结构为(4,30,60,1),学习率随着训练过程从1×10-3逐渐降至1×10-5,优化器选用Adam,损失函数选用MSE。
其中,ADAM是一种优于梯度下降法的网络参数更新算法,它结合了AdaGrad和RMSProp算法的优点,能通过计算梯度的一阶矩估计和二阶矩估计为不同的参数设计独立的学习率,并提供了解决稀疏梯度和噪声问题的优化途径。损失函数MSE指模型预测值f(x)与样本真实值y对应点误差的平方和的均值,其值越小表明精度越高。MSE可表示为:

3.3 监督训练
如图5所示,深度学习控制器以训练集(12条)地震波的加速度指令信号、加速度反馈、速度反馈和位移反馈信号作为输入,以三参量控制器输出的控制信号yi作为标签,以标签与深度学习控制器输出f(xi)的差值作为损失函数,通过Adam优化算法更新网络参数,从而使深度学习控制器最终逼近三参量控制器的控制性能。

图5 深度学习控制器训练示意图Fig.5 Training diagram of deep learning controller
4 仿真验证
监督学习训练完成后,将深度学习控制器与振动台系统对接进行仿真测试。选取加速度峰值为0.8 g的El Centro、CAPE MENDOCINO和EAR等6条地震波作为输入指令信号对深度学习控制器的性能进行测试,并与三参量控制器进行对比。在分别使用深度学习控制器和三参量控制器的情况下,振动台系统输出与输入的波形对比如图6所示(仅展示3条波)。

图6 深度学习控制器和三参量控制器性能对比图Fig.6 Performance comparison diagram of deep learning controller and three variable controller
为对比深度学习控制器和三参量控制器的性能,选用系统输入输出波形的相关系数和最大峰值误差作为对比指标。其中,相关系数又称为皮尔逊系数r,定义为:

如表1所示,在分别使用深度学习控制器和三参量控制器的情况下,二者的差值基本保持在5%以下。仿真结果表明:基于LSTM搭建的深度学习控制器在经过监督学习后,拥有逼近三参量控制器的性能,可以较为精准地再现地震波加速度时程曲线。

表1 深度学习控制器和三参量控制器的性能对比Table 1 Performance comparison between deep learning controller and three-variable controller
在使用深度学习控制器的情况下,系统输出的位移响应如图7所示。从振动台系统输出的位移曲线来看,位移曲线的变化基本保持在零位轴线附近,并未因为积分而出现趋势走向,可以满足振动台对输出波形位移量程需求。
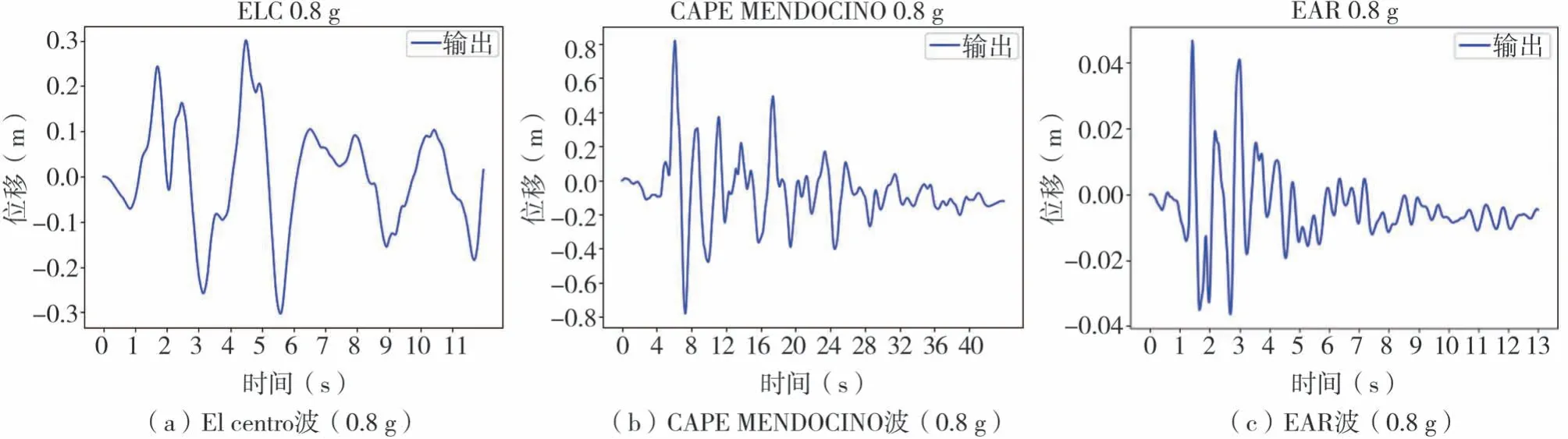
图7 振动台输出位移波形Fig.7 Displacement waveform output of shaking table
5 结论
文中以振动台的智能控制为研究对象,提出了一种基于LSTM的振动台深度学习控制器框架和对应闭环控制方法,并利用LSTM模型对三参量控制算法的输入输出关系进行学习和模拟,验证了该控制器的可行性和有效性。经仿真验证:通过监督学习的方式,深度学习控制器能够有效逼近三参量控制器的控制性能,具有较好的再现地震波加速度时程曲线,这说明深度学习控制器在处理非线性控制问题上具备足够的潜能。
但是,仅通过监督学习的方式并不能让深度学习控制器拥有超越传统三参量控制的性能,为进一步提升深度学习控制器的性能,文中的后续工作将会从以下几个方向开展:
(1)在深度学习控制器的基础上结合具备自主学习能力的强化学习,从而增强控制器对不确定性和各种扰动的自适应能力,以实现深度学习控制器的进一步升级;
(2)从地震模拟振动台的单轴控制推广到三向六自由度的控制问题;
(3)开展深度学习控制器的实验验证和测试,落实深度学习控制器的实际应用,包括算法的硬件实现和平台移植问题。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
空间科学学报(2020年3期)2020-07-24
纺织科学研究(2020年1期)2020-05-21
成都信息工程大学学报(2019年4期)2019-11-04
制造技术与机床(2017年6期)2018-01-19
振动工程学报(2015年1期)2015-03-01
物理实验(2015年9期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
噪声与振动控制(2015年4期)2015-01-01
组合机床与自动化加工技术(2014年12期)2014-03-01
