
相控阵雷达干扰抑制方法
2022-11-15 09:59:32王新玥陈建斌杨傲爽吴毅杰王玥琪
航天电子对抗 2022年5期
王新玥,陈建斌,杨傲爽,吴毅杰,王玥琪
(上海航天电子技术研究所,上海 201109)
0 引言
在日益复杂的电磁环境下,干扰抑制一直是个经久不衰的研究议题。在相控阵雷达进行目标搜索和目标跟踪时,如果敌方施放有源压制式干扰[1],则会导致类噪声形式的干扰信号将目标淹没,从而影响雷达的目标搜索效果。当干扰落在天线方向图的主瓣范围内,传统的自适应波束形成方法[2-3]会严重破坏主波束的形状,影响雷达搜索和跟踪的结果[4]。主瓣干扰抑制作为干扰对抗领域的重要方向,得到了广泛研究。文献[5]提出了阻塞矩阵预处理(BMP)算法,利用均匀线阵的阵列导向矢量构造阻塞矩阵,并用阻塞矩阵通过相邻信号相消干扰的方法对回波信号进行预处理,以抑制主瓣干扰信号,最后对预处理后的信号进行ADBF处理以消除旁瓣干扰,但是此算法会导致波束形状失真,主瓣波峰发生偏移,并使得输出信干噪比下降。文献[6]改进阻塞矩阵的构造,可以使其消除多个主瓣干扰。不同于基于相邻天线相消的阻塞矩阵构造方法,文献[7]提出了基于Householder变换[8]的阻塞矩阵构建方法,该方法使处理后的输出信号不包含色噪声,同时使构造阻塞矩阵更加灵活易行。BMP类方法的算法的阻塞矩阵构造简单易于实现,且算法复杂度低,但是其性能依赖于干扰角度这一先验信息的准确获取,而额外的角度估计运算也给雷达的数据处理造成了一定的运算负担,角度估计的偏差会使得干扰抑制效果严重降低,并且阻塞预处理令阵列单元损耗了一定的自由度,因而会导致方向图主瓣展宽和旁瓣升高等问题[9]。文献[10]提出基于特征投影预处理(EMP)的主瓣抗干扰方法,该方法以在空间理论为基础,通过将接收数据投影到主瓣干扰的正交子空间中来构造投影矩阵,该方法无需估计主瓣干扰角度并且不会损失阵列自由度,因而干扰抑制效果更加稳健,自适应方向图也更接近静态方向图,但会导致方向图主瓣峰值向主瓣干扰方向偏移。针对上述问题,本文提出了改进的干扰抑制算法。该方法首先采用贝叶斯预测密度准则计算干扰的个数,并采用空间谱估计的方法计算干扰的角度,区分出主瓣干扰和旁瓣干扰,然后采用基于Householder变换的阻塞矩阵来消除主瓣干扰,并对旁瓣干扰的线性约束,使其有效同时消除主瓣干扰和旁瓣干扰。该方法有效解决了主瓣偏移的问题,并且由于不需要对协方差矩阵进行特征分解,降低了算法的复杂度。
1 阵列信号模型
假设空间内同时存在1个主瓣干扰信号和P个旁瓣干扰信号,干扰信号的类型为有源压制式干扰,干扰信号与回波信号均为窄带模型,且彼此之间互不相关,空间中的噪声符合N(0,σ2n)分布。在t时刻下雷达接收的回波信号可表示为:

式中,a(θk)sk(t)为干扰回波,n(t)为输入噪声,θ0表示主瓣干扰的入射角度,s0(t)为主瓣干扰对应的信号复包络,θk为旁瓣干扰的入射角度,sk(t)为旁瓣干扰对应的信号复包络,k=1,2,…,P。则K点下的回波信号可以表示为:

式中,K为回波采样数。根据式(2)可以求得回波的采样协方差矩阵为:
2 算法流程

2.1 估算干扰个数
由于主瓣干扰与旁瓣干扰的个数之和P+1未知,因而需要首先判断干扰的总个数。为了准确估计干扰个数的总和,采用贝叶斯预测密度准则[11]估计大特征值个数,即为干扰个数。为降低运算量,采用训练数据获得协方差矩阵的估计值。假定训练数据相互独立并且服从高斯分布,根据其分布特性,可以写出其对应的联合概率密度函数为:

式中,Xd=[x1,x2,…,xNd]为训练信号,Nd为训练样本数,L为阵元个数,Rx为训练数据的真实协方差矩阵,且i=1,2,…,Nd。可表示出式(4)的对数似然函数:
式中,k=1,2,…,L。将式值最小时的k值作为大特征值数量的估计:

即可在干噪比较低的情况下也能准确估计出空间中的干扰总数。
2.2 估算干扰角度并区分主瓣干扰和旁瓣干扰
在计算完干扰源总数后,对训练信号Xd使用谱峰搜索进行谱估计。为了降低运算量,可以先进行粗略搜索,再对可能为干扰的位置进行精细搜索。粗略搜索时的搜索范围为(θmin,θmax),搜索步长为δ。
而后对粗略搜索结果超过阈值的K个谱峰附近进行精细的谱峰搜索。精细搜索的范围为(θiδ,θi+δ),谱峰精细搜索步长为α,i=1,2,…,K。使用Capon算法[12]进行谱估计,其谱峰搜索公式为:

依据估算出的干扰个数Q,取精细搜索后前Q个谱峰所在的角度为干扰角度,再依据静态方向图时求得的主瓣区域,即可区分开主瓣干扰和旁瓣干扰,得到主瓣干扰角度的估计值为,以及旁瓣干扰角度的估计值
2.3 根据主瓣干扰角度信息构造Householder变换阻塞矩阵

式中,e=[1 0…0]TL×1。利用Householder向量构建Householder矩阵为:

采用Householder矩阵消除主瓣干扰:

由式(9)可见,与Householder矩阵相乘可以使主瓣干扰的特征矢量除第一行外的其他元素均变为0。将Householder矩阵重新表示为:

式中,qH为Householder矩阵第一行,为1×L维的行向量;而B则表示其余各行构成的(L-1)×L维矩阵,也就是所求阻塞矩阵。则有:

可见,阻塞矩阵B可以使主瓣干扰对应的特征矢量转化为(L-1)×1维的全零列向量,使主瓣干扰对应方向的信号被完全消除。
将阻塞矩阵与回波数据相乘并计算协方差矩阵:

由式(14)可知,Householder矩阵为厄米特矩阵,因此求得的阻塞矩阵B为酉矩阵,即BBH=I。所以阻塞矩阵B不对破坏噪声特性。
2.4 根据旁瓣干扰角度信息进行线性约束
为保证算法能够对旁瓣干扰有较好的抑制效果,在计算自适应权矢量时对旁瓣干扰采用约束的方法。利用式(8)得到的旁瓣干扰角度,对旁瓣干扰位置的权矢量响应进行线性约束:

利用式(15)的线性约束条件,使训练信号的输出功率最小化,则最优权矢量的求解算式为:
式中,F=[0,…,0]T。求解式(16)可得:

2.5 回波信号处理
首先,利用式(12)得到的阻塞矩阵B对回波信号进行阻塞矩阵预处理,即:

式中,Xb为阻塞预处理后的输出回波矩阵。回波数据在经过阻塞矩阵预处理后,主瓣干扰分量得到抑制。再利用式(17)得到的自适应权矢量,将预处理输出结果进行加权处理:

经过最优权矢量加权处理后,回波信号中的旁瓣干扰分量也得到消除,同时主瓣波峰也不会发生偏移。该方法的流程如图1所示。
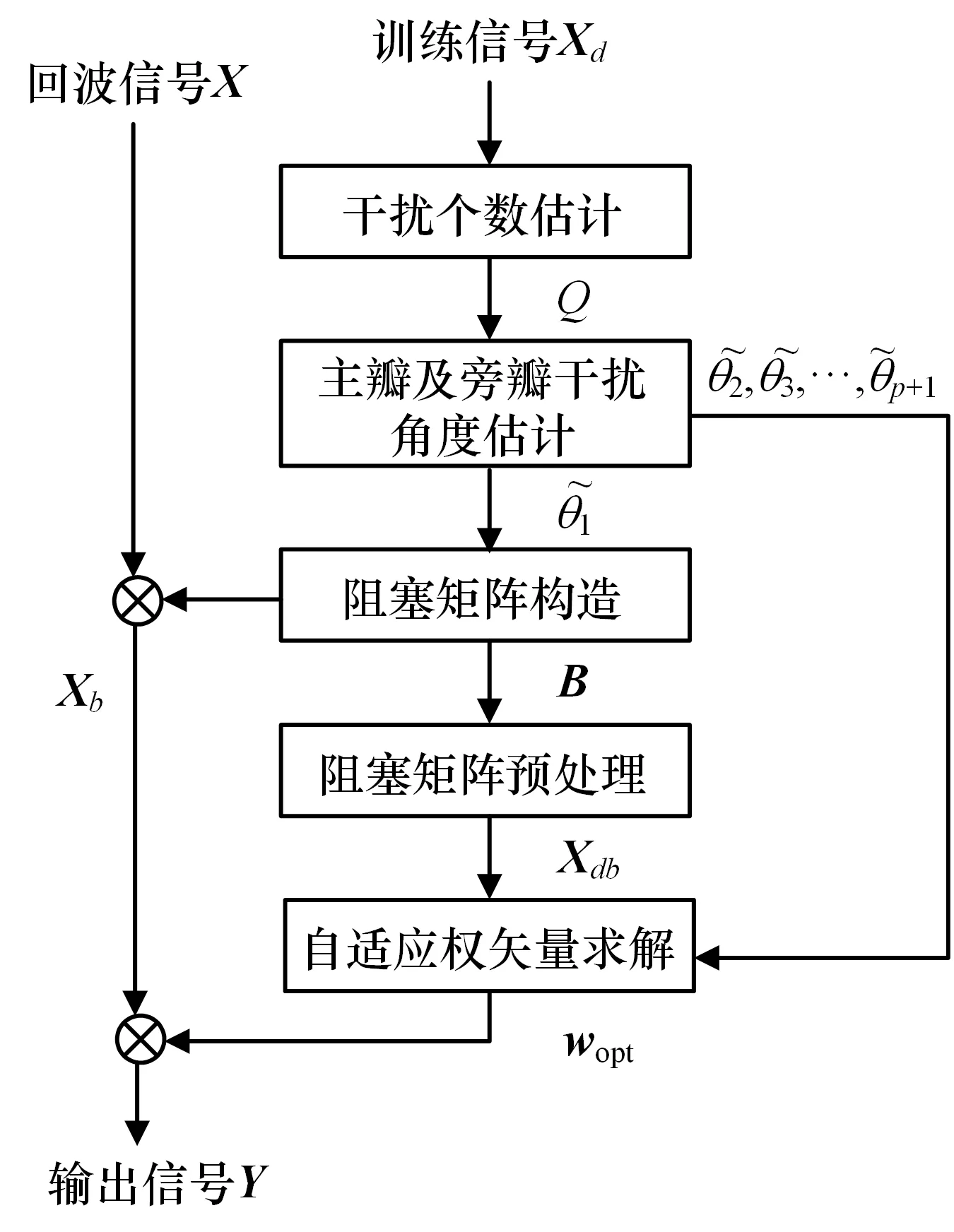
图1 算法流程
3 仿真校验
为验证本文方法的干扰对抗有效性,以毫米波相控阵雷达作为实验模型,仿真设置的雷达主要参数如表1所示。此外,假设接收阵列由15个均匀排布的各向同性的阵列单元组成,阵元间距为波长的一半。期望信号的所在距离为18 km,入射角度为0°,信噪比为0 dB。噪声为零均值,方差为1的高斯白噪声,训练样本的快拍数为800。主瓣及旁瓣干扰信号均为有源压制式干扰信号。干扰信号分别从-3°、-20°和40°进入天线阵,位于3°的主瓣干扰干噪比(INR)为5 dB,位于-20°和40°的旁瓣干扰INR为30 dB。
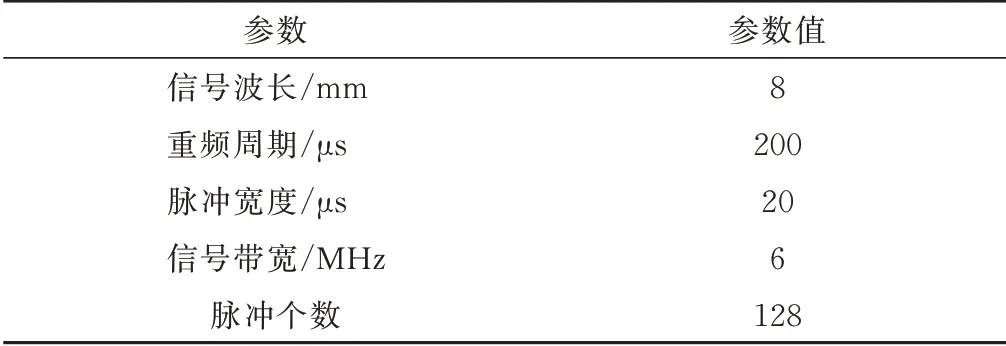
表1 雷达主要参数
图2为对干扰角度的空间谱估计结果,可以看出,根据极值分布,本文方法可以准确搜索出主瓣干扰信号的角度为-3°,旁瓣干扰的角度为-20°和40°。
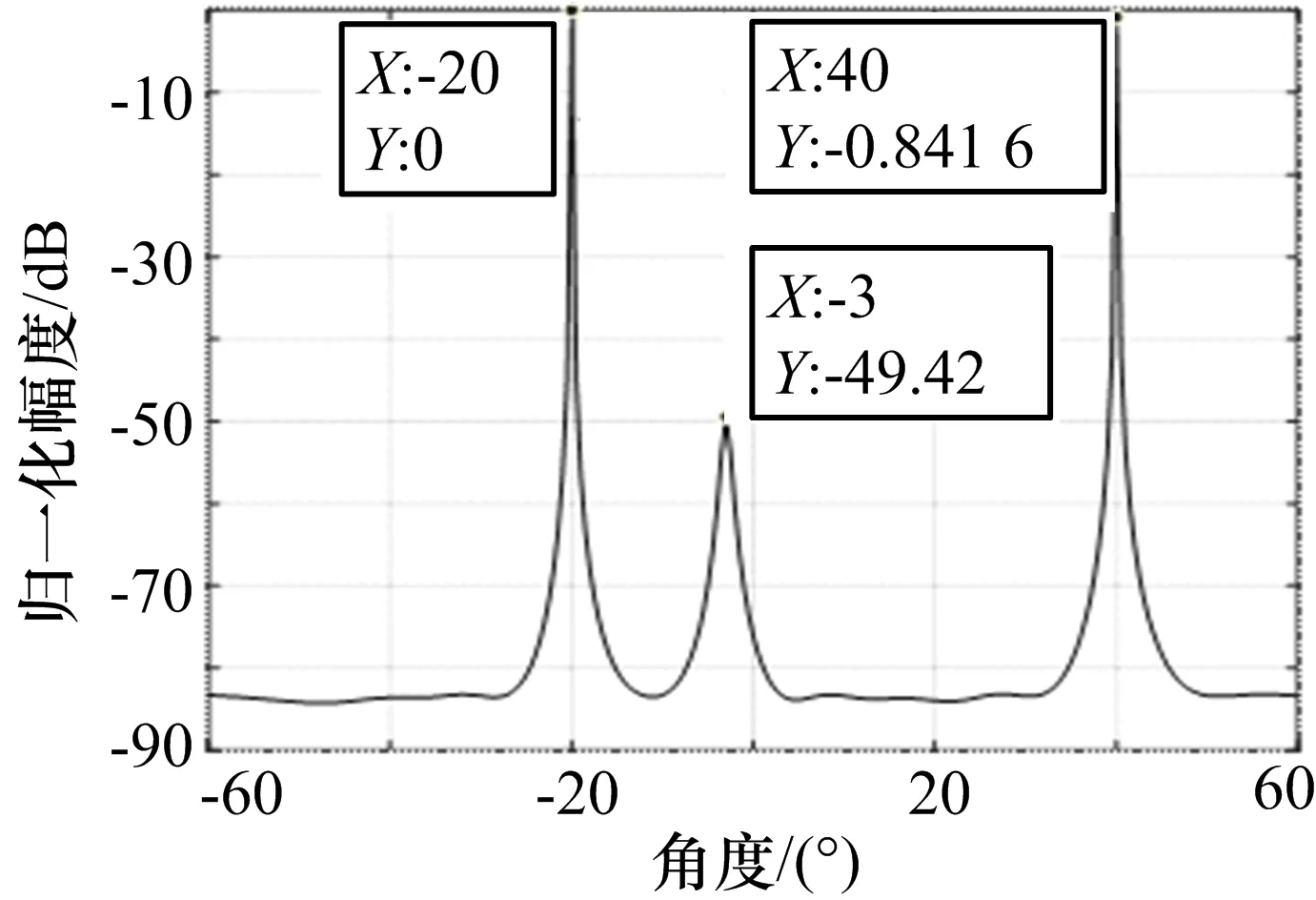
图2 空间谱估计结果
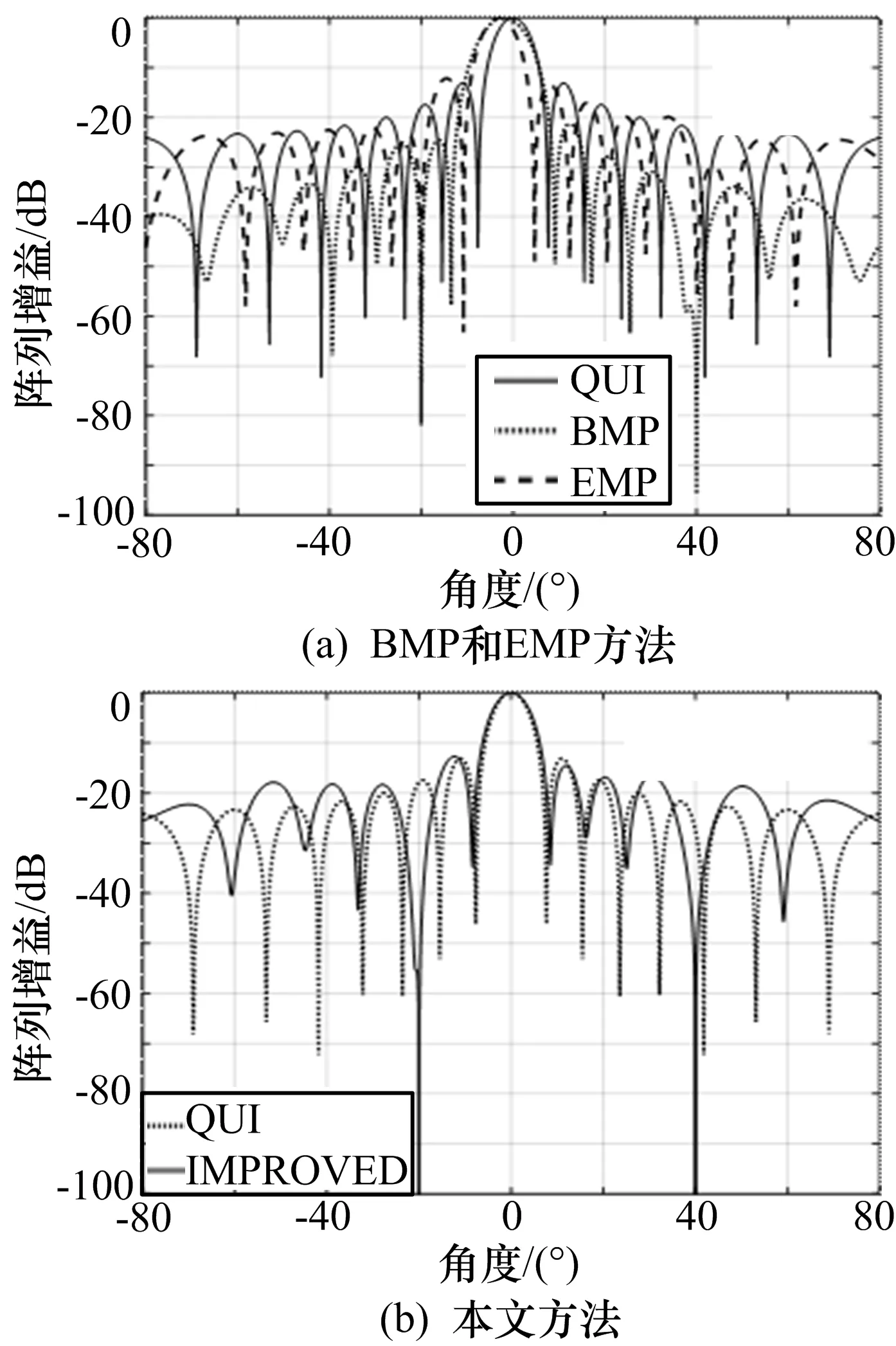
图3方向图对比
图3 (a)和图3(b)分别比较了BMP方法、EMP方法和本文方法(IMPROVED)的天线方向图,并与静态方向图(QUI)进行对比。由图3(a)可知,当主瓣干扰功率远小于旁瓣干扰时,BMP方法存在主瓣展宽和偏移的问题,而EMP方法使主瓣波峰向主瓣干扰位置偏移。由图3(b)可知,本文方法不存在主瓣波束偏移的问题,实现了较好的主瓣保形效果,所形成的主瓣包络与静态方向图基本重合;并且对旁瓣干扰信号保持了较为理想的抑制效果,在旁瓣干扰处的抑制深度均超过了-100 dB。
图4为使用本文方法在干扰抑制前后的归一化目标检测对比。由图可知,由于对干扰的有效抑制,本文方法提高了目标的SINR,在干扰抑制后可以准确识别距离为18 km的目标信号,有利于对目标的检测与跟踪。
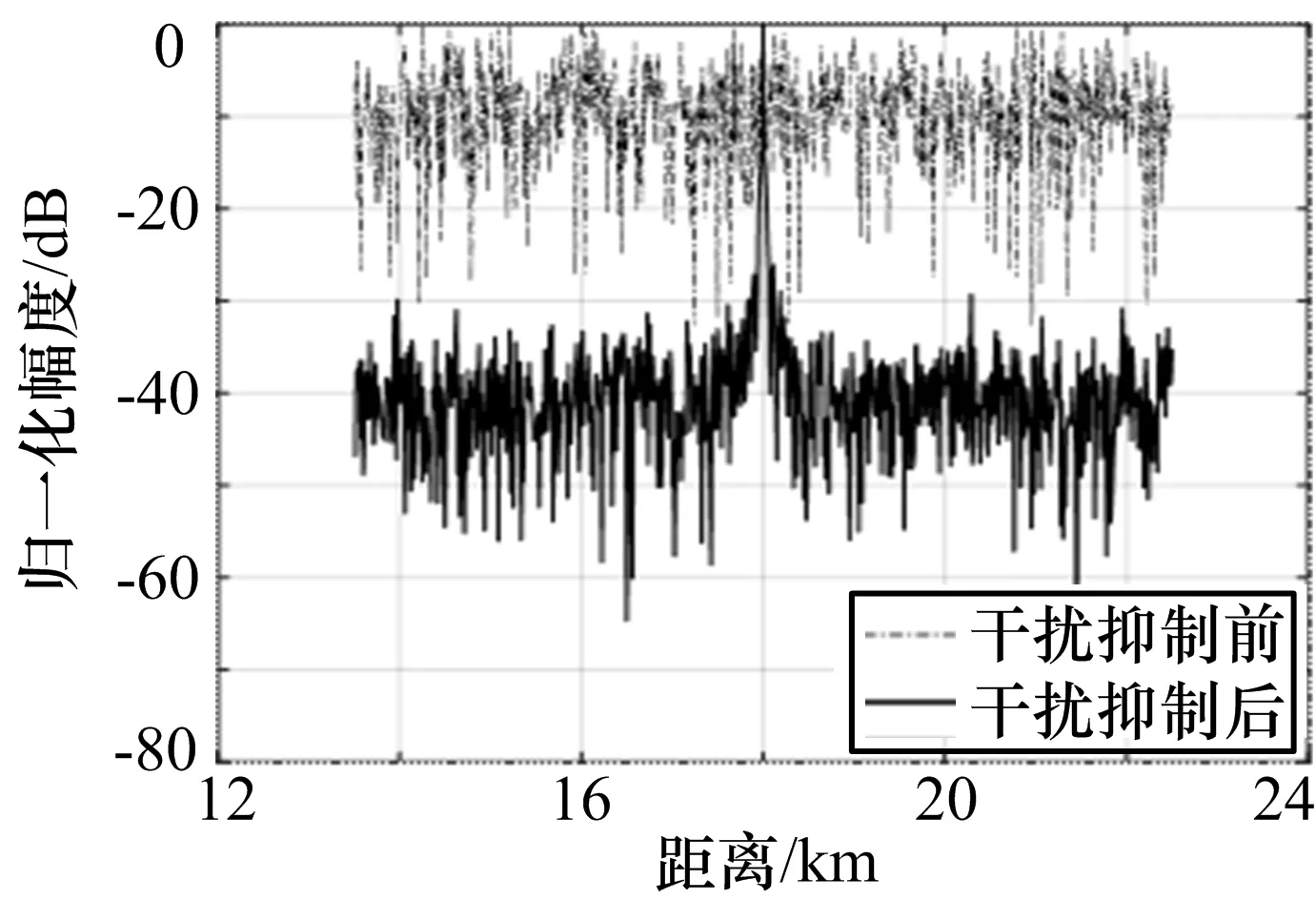
图4干扰抑制前后目标检测结果对比
图5 为对比BMP方法、EMP方法与本文方法随着快拍数的增加输出SINR变化趋势,并与最优性能(OPT)的输出情况进行比较。选取快拍数的范围为15~100,步长的递增值设置为5,仿真结果为250次蒙特卡洛实验取平均值所得。由图可知,本文方法在快拍数小于30时的干扰抑制效果较差,这是由于快拍数过低时Capon角度估计误差较大,会严重影响干扰抑制效果,而当快拍数增加到30之后则逐渐收敛,能够达到优于BMP和EMP方法的效果。因而若想保证本文方法能够有效且稳定抑制干扰,应选取能够保证准确估计干扰角度的快拍数。

图5 不同快拍数下输出SINR曲线比较
4 结束语
从满足工程实现中实时性的角度出发,本文同时利用主瓣干扰和旁瓣干扰的信息,提出一种基于Householder变换的能够综合对抗有源压制式干扰的方法,该方法能够有效解决抑制主瓣干扰时出现的主波束畸变、主瓣展宽和主瓣峰值偏移等问题,在多干扰环境中可以完成对主瓣干扰和旁瓣干扰的有效抑制,有利于对目标信号的检测。仿真实验也证明了该方法的有效性。■
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:10
小学生学习指导(低年级)(2021年9期)2021-10-14 07:57:00
电气技术(2021年3期)2021-03-26 02:46:08
海军航空大学学报(2020年2期)2020-07-27 02:12:42
通信电源技术(2020年22期)2020-03-27 06:48:02
中学生数理化·七年级数学人教版(2019年10期)2019-11-25 07:34:00
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:46
电子技术与软件工程(2017年12期)2017-07-05 13:53:25
工业设计(2016年6期)2016-04-17 06:42:54
