作战任务规划要素的图谱化表示方法
2022-11-15 06:31马悦吴琳
军事运筹与系统工程 2022年1期
马悦 吴琳
(1.国防大学 联合作战学院,北京100091;2.中国人民解放军31002 部队,北京100091)
1 引言
优秀的指挥员凭借军事知识和战争实践经验,可以在脑海中建立作战任务之间的复杂关系,将战争想象与合适的战争场景进行准确匹配。而机器却难以完成“作战经验—关系抽取—场景应用”之间的快速转化,其主要原因是缺乏知识而无法推理复杂任务关系。知识表示是机器认知和理解世界的基础[1],对复杂作战问题进行合理的知识表示,是实现自动化和自主化决策的前提。
许多学者对军事知识的合理化表示进行了研究。徐宁以线性时序逻辑建立了无人机任务规划问题的描述模型[2];朱璇利用统一建模语言对作战方案计划中的时间、空间和信息进行了可视化描述[3];黎鑫采用OWL(Web Ontology Language)语言对作战方案领域知识进行了建模[4];于鸿源等基于复杂网络对作战计划协同中作战行动及时间约束关系进行了建模[5];朱延广等采用系统建模语言对联合火力打击问题进行了形式化建模[6]。上述描述方法未能形成军事知识表示的统一架构,相互之间难以关联和共享,且无法对指挥员的思维活动进行建模,导致指挥艺术层面的经验难以在技术层面得到应用。文献[7]~[10]虽然探索了基于知识图谱进行军事知识表示的方法,但还未涉及作战任务规划领域。
针对上述问题,本文提出一种作战任务规划要素的图谱化表示方法,将作战任务规划中各要素以知识图谱形式进行表示。其中,作战事理图谱,是对指挥员头脑中设计的作战演进过程进行形式化描述,从而将人类思维过程转化为机器可理解的形式,为融入技术方法奠定基础;任务威胁图谱将作战任务和敌方威胁之间的隐性推理过程,以显性经验知识的形式展现出来,便于与其他图谱知识进行链接推理;战场实体图谱和单元能力图谱描述了战场中各类实体、部队单位及其属性特征。
2 基本概念
2.1 作战任务规划要素
从工程实现角度来讲,作战任务规划(Operation Task Planning)是在确定作战任务、作战资源、作战单元和作战行动等基本要素基础上,分析任务关系、资源关系和协同关系等内容,进而完成作战任务优选、作战任务分配和协同目标分配等活动,其关系如图1 所示。
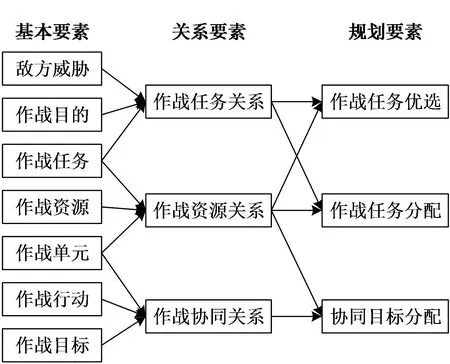
图1 作战任务规划要素
作战任务规划的基本要素包括:作战目的,用于描述作战行动所要达到的预期结果;作战任务,在一定战场态势下为实现预定作战目的所采取的一系列具有紧密关系的行动;作战资源,作战实施过程中不可再分割的物质基础,具有处理作战任务的能力;作战单元,在一定范围内能够独立遂行作战任务的基本作战单位;作战行动,作战单元为完成作战任务而设计的活动;作战目标,作战任务所作用的目标对象客体;敌方威胁,敌方为阻挠我方行动、摧毁我方军事力量和设施所采取的军事行动。
作战任务规划的关系要素,包括作战任务关系、作战资源关系和作战协同关系。其中:作战任务关系,是指作战任务之间存在的层次关系、时序关系和逻辑关系。层次关系描述了作战任务之间包含与被包含的关系,时序关系描述了作战任务之间的执行顺序,而逻辑关系描述了作战任务的取舍关系。作战资源关系,是指作战任务对作战资源的需求关系以及作战资源对作战单元的支撑关系,通过作战能力的量化来建立作战任务和作战单元之间的映射[11],从而实现作战任务分配。作战协同关系,是指多个作战单元在同一时空范围内执行同一作战任务或具有逻辑关系的不同作战任务时,在空间部署、时间衔接、目标分配、火力分配和效果达成等方面所具有的相互照应、相互配合和优劣互补的关系[12]。
作战任务规划的规划要素,包括作战任务优选、作战任务分配和协同目标分配。其中:作战任务优选,是指从作战任务集合中选择能够确保作战使命顺利实现并取得最佳效果的一系列作战任务;作战任务分配,是指将作战任务指派给单个或若干作战单元去执行,其实质是建立作战任务集合与作战单元集合之间的动态映射。协同目标分配,是指多个作战单元在同一时空范围内为完成同一项作战任务或相互之间存在逻辑关系的多个作战任务,从时间、空间和效果等多个角度考虑所进行的目标分配和火力分配。
2.2 知识图谱与事理图谱
知识是人类通过观察、学习和思考客观世界而总结出的概念、事实和规则,而知识表示是对现实世界的一种抽象表达。知识表示方法有谓词逻辑、产生式规则、框架表示、语义网络及语义网等[9]。为优化搜索引擎和提高搜索质量,Google 提出了知识图谱的概念,并迅速应用于智能搜索、个性推荐和智能问答等领域。知识图谱是一种使用图模型来描述现实世界的语义网络,将基本知识要素通过语义相关联,自然地刻画了万物之间的复杂关系[13]。知识图谱主要由节点和有向边组成,节点可以表示概念、实体或属性值,边可以表示概念/实体之间的关系或概念/实体的属性[14]。
知识图谱偏重描述知识的静态特征和确定性事实,难以满足事理逻辑的动态描述和不确定性推理。为此,刘挺提出一种以事件为核心的动态知识图谱——事理图谱(Event Evolutionary Graph),其节点和有向边分别表示事件及事件之间的演化关系,从而揭示了事件在时空域上的不确定性演化规律[15]。事理逻辑主要包括因果事理、条件事理、顺承事理、并行事理、组成事理和上下位事理。
3 作战任务规划要素图谱化表示
3.1 要素图谱描述
将作战任务规划要素表示为作战事理图谱(Operational Event Evolutionary Graph)、任务威胁图谱(Task-Threat Knowledge Graph)、战场实体图谱(Battlefield Entity Knowledge Graph)和单元能力图谱(Unit Ability Knowledge Graph),并采用资源描述框架(Resource Description Framework,RDF)数据模型进行描述。
3.1.1 作战事理图谱及描述
以思维活动为主的指挥艺术是作战决策的核心。指挥员凭借广阔的视野和敏锐的洞察力,能够将现实战场映射在脑海中,通过想象完成作战进程的粗略设计,类似于情景规划(Scenario Planning)[15]。用“作战事理图谱”来形式化描述这种针对特定作战场景的思维活动,为作战任务规划提供概略指导。
作战事理图谱是一种用于描述关于作战过程演进路径思维图景的事理图谱,其节点和有向边分别表示各作战阶段的作战目的及相互之间的演化关系。本质是形式化描述作战目的的分解过程,展现了作战目的之间的组成、顺序、并行和条件等关系。当作战目的不可再分解时,必须明确能够达成作战目的的作战任务。
作战事理图谱可表示为以下形式:

作战目的节点Eop的属性,用以下元组进行描述:

式(2)中,Id用于唯一标识作战目的;Name为作战目的名称;Targets为达成作战目的过程中涉及的实体目标或地理区域等;Effects为达成作战目的的效果。
作战任务节点Eot的属性,用以下元组进行描述:

式(3)中,Id用于唯一标识作战任务;Name为作战任务名称;Time为任务的时间属性;Targets为目标清单,明确了作战任务涉及的实体目标或地理区域;Effects为任务完成时所需达成的指标;Capability为完成作战任务所需的作战能力类型及大小;Threats为执行作战任务时可能面临的主要威胁;Constraint为作战任务执行的时间、空间和资源等约束条件。
有向边Rpp描述了作战目的之间的条件关系(Condition)、组成关系(Compose)、顺序关系(Sequence)和并行关系(Parallel),而有向边Rpt描述了作战目的与作战任务之间的因果关系(Result),两类有向边的属性可共同用以下元组进行描述:

式(4)中,Id用于唯一标识有向边;Label为有向边所表示的关系类型;StartE和EndE分别为有向边的起始和终止节点。当有向边描述条件关系时,Pro表示“在StartE实现条件下EndE的实现概率”;当有向边描述因果关系时,Pro表示“若想实现StartE则需执行EndE的概率”;其余情况下,Pro无意义。
3.1.2 任务威胁图谱及描述
贴近军事对抗博弈实际,需面向威胁分析进行作战任务规划。在执行作战任务时,敌方会采取相应措施阻碍我方行动;而我方为保证作战任务顺利实施,必然会在前期充分考虑敌方威胁,从而制定应对措施,完善作战方案。用“任务威胁图谱” 来描述“作战任务—敌方威胁”和“敌方威胁—作战任务” 之间的因果条件关系,从而将隐性推理过程以显性经验知识展现出来。
任务威胁图谱是一种用于描述作战任务、敌方威胁及相互之间威胁和处置关系的知识图谱。节点表示作战任务或敌方威胁;由作战任务指向敌方威胁的有向边,表示作战任务对敌方威胁的处置关系;由敌方威胁指向作战任务的有向边,表示敌方威胁对作战任务的威胁关系。
任务威胁图谱可表示为以下形式:

敌方威胁节点Eht的属性,用以下元组进行描述:

式(6)中,Id用于唯一标识敌方威胁;Name为威胁名称;Targets为威胁对象清单;Effects为威胁效果,根据对己方作战任务执行的影响程度进行量化;Capability明确了敌方威胁行动所具有的作战能力。
有向边集合Rtt描述了作战任务对敌方威胁的处置关系(Disposition)和敌方威胁对作战任务的威胁关系(Threaten),有向边的属性用以下元组表示:

式(7)中,Id用于唯一标识有向边;Label为有向边的类型;StartE和EndE分别为有向边的起始和终止节点。当有向边描述处置关系时,Pro表示“在作战威胁出现条件下采取作战任务能够处置威胁的概率”;当有向边描述威胁关系时Pro =1,表示“凡是能预测到的敌方威胁,都会对所执行的作战任务产生影响”。若通过评估决定不对敌方威胁采取措施,则设立空任务节点与威胁节点建立连接。
3.1.3 战场实体图谱及描述
战场实体图谱是一种用于描述战场中与作战活动密切相关的客观实体及其相互之间关系的知识图谱。节点表示地形地貌、建筑桥梁、武器平台和部队单元等战场实体,有向边表示实体之间的空间拓扑关系、时间演化关系和语义逻辑关系等。对战场实体的分析,实质是分析其内在属性、逻辑关系和时空分布等特征对作战行动的影响。
战场实体图谱可表示为以下形式:

式(8)中,E ={e1,e2,…}是战场实体集合;Rbe={r1,r2,…} 用于描述战场实体之间的关系;函数Fbe∶(E ×E)→Rbe将两个战场实体关联到相应类型有向边。
战场实体节点的属性,用以下元组进行描述:

式(9)中,Id用于唯一标识战场实体;Label为战场实体的类型标记;Name为战场实体名称;Attribute为战场实体属性,不同类型的战场实体具有不同属性。
有向边的属性,用以下元组表示:

式(10)中,Id用于唯一标识有向边;StartE和EndE分别为有向边的起始和终止节点(战场实体);Label为有向边的类型标记。战场实体之间的关系可分为空间拓扑关系、时间演化关系和语义逻辑关系。
3.1.4 单元能力图谱及描述
作战单元因拥有各类型作战资源而具有作战能力,当作战资源因战损、故障、消耗或补给发生变化时,相应的作战能力随之变化。
单元能力图谱是一种用于描述作战单元、作战资源、作战能力及相互之间关系的知识图谱。节点表示作战单元或作战能力,有向边表示作战单元对作战能力的拥有关系。作战资源不直接构建为节点,而是作为作战单元的属性,以便于作战能力数值量化计算。
单元能力图谱可表示为以下形式:

作战单元节点Eou的属性,用以下元组进行描述:

式(12)中,Id用于唯一标识作战单元;Label为作战单元类型;Name为作战单元名称;Location为作战单元的空间位置;Resourses为作战单元所拥有的作战资源。
作战能力节点Eoc的属性,用以下元组进行描述:

式(13)中,Id用于唯一标识作战能力,同时也区分了不同作战能力类型;Name为作战能力名称;Tasks ={task1,task2,…}为作战能力可支撑完成哪些作战任务。
有向边的属性,用以下元组表示:

式(14)中,Id用于唯一标识有向边;StartE和EndE分别为有向边的起始节点(作战单元)和终止节点(作战能力);Methods为作战单元具备作战能力大小的计算方法,作战能力的大小与作战单元拥有相应作战资源的多少有关。
3.2 要素图谱构建
作战任务规划要素图谱的构建,需基于专家经验知识、作战案例数据库、作战规则手册和作战数据库,如图2 所示。
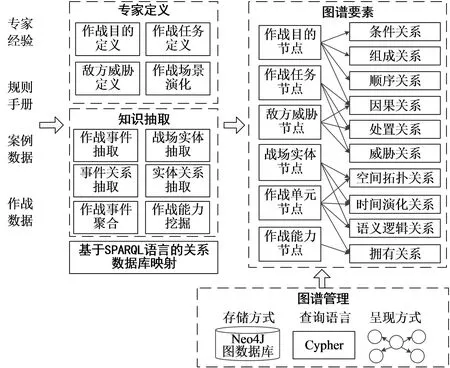
图2 要素图谱构建过程
作战目的、作战任务和敌方威胁节点及相互之间的关系,通过对作战案例中敌我双方交战行动的聚合和抽象进行构建,也可由军事专家针对某一作战场景进行人工构建;战场实体、作战单元和作战能力节点及相互之间的关系是对客观事实的描述,主要通过从作战规则手册和作战数据库中构建实体字典和规则特征来进行抽取。所有要素图谱,基于专业级数据库Neo4j 进行管理、查询和展示。
不同要素图谱,可通过节点之间的关联融合形成新的图谱。作战事理图谱,通过作战任务节点与任务威胁图谱进行关联,通过作战目的节点的目标属性与战场实体图谱进行关联;任务威胁图谱,通过作战任务节点的目标属性与战场实体图谱进行关联,通过作战能力属性与单元能力图谱进行关联;作战实体图谱,通过战场实体的类型属性与单元能力图谱进行关联。
例如,“作战事理图谱”和“任务威胁图谱”的融合过程为:
(1)遍历作战事理图谱中所有节点并判断其类型,若是作战任务节点,则将其与任务威胁图谱中相应的作战任务节点进行连接。
(2)提取作战事理图谱中所有以“顺序”关系连接的作战目的节点。
(3)寻找上述节点中具有最长路径的“作战目的”链,组成新图谱的第一层具有顺序关系的节点主线。
(4)节点进行关联,节点关联过程如图3 所示。
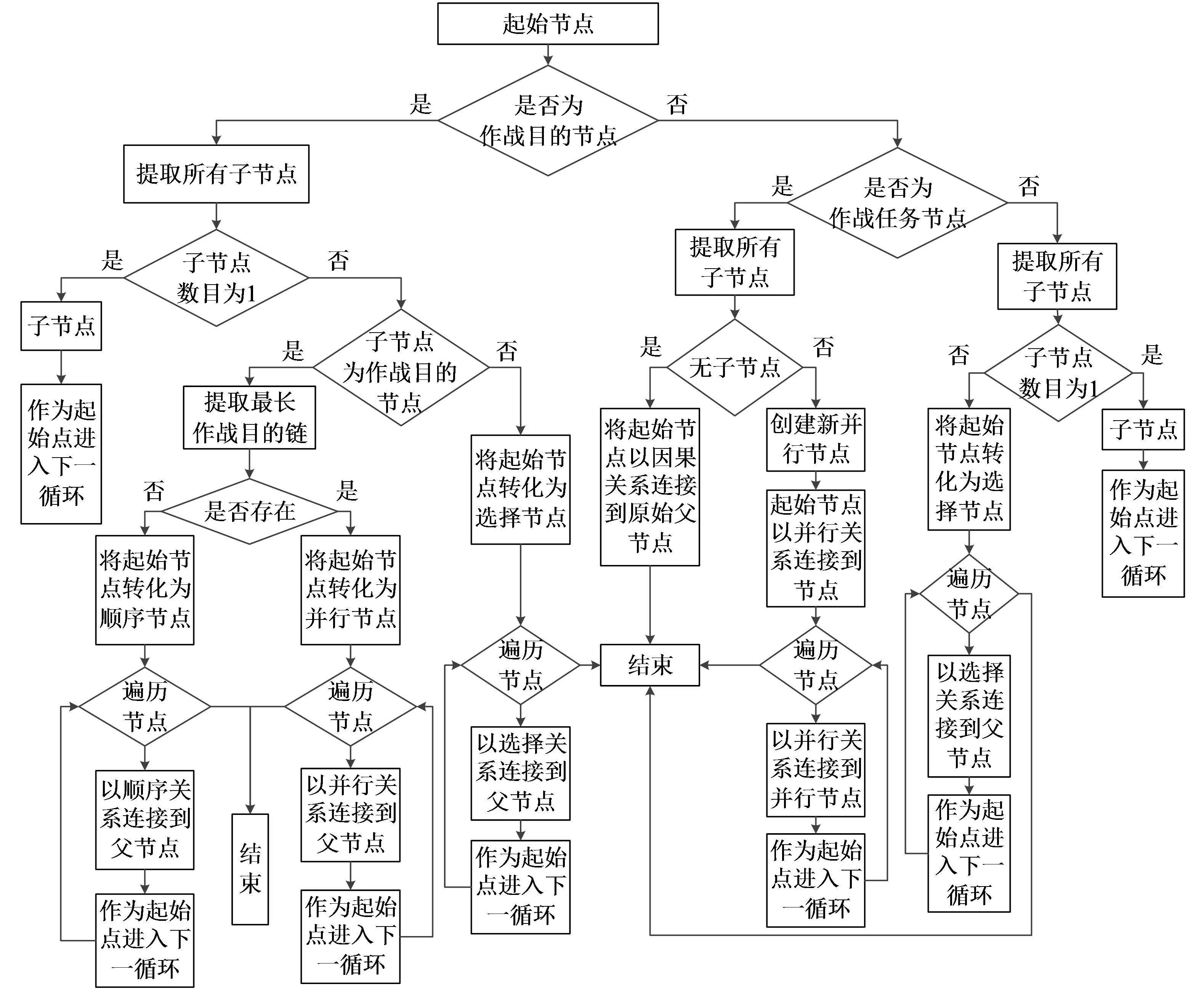
图3 不同要素图谱节点关联过程
以主线中各节点为起始节点进行以下判断和操作。
步骤1:判断起始节点类型。若为作战目的节点,则判断其子节点的数目,若数目为1 则以子节点为起始节点重新进入步骤1,否则进入步骤2;若为作战任务节点,则进入步骤3;若为敌方威胁节点,则进入步骤4。
步骤2:判断子节点类型。若为作战任务节点,则将起始节点转化为“选择节点”,所有子节点以选择关系连接到该节点,遍历各子节点并以其作为起始节点返回步骤1。若为作战目的节点,则判断子节点中是否具有最长作战目的链。如果存在,则将起始节点转化为“并行节点”,所有子节点以并行关系连接到该节点;否则转化为“顺序节点”,所有子节点以顺序关系连接到该节点。而后,遍历各子节点并以其作为起始节点返回步骤1。
步骤3:判断起始节点是否有子节点。如果有则创建新的“并行节点”,将起始节点和所有子节点以并行关系连接到该节点;否则,将起始节点以因果关系连接到原始父节点,本次判断结束。
步骤4:判断子节点数目。若数目为1,则以子节点为起始节点返回步骤1;否则将起始节点转化为“选择节点”,所有子节点以选择关系连接到该节点。遍历各子节点并以其作为起始节点返回步骤1。
(5)遍历结束后,输出新图谱。
3.3 应用场景
作战任务规划要素图谱可为军事智能化搜索、分析和决策提供支撑。
(1)军事信息管理。作战任务规划要素图谱以其特殊的图结构,可以从“实体-关系”角度将不同类型作战数据进行关联融合,从而形成一个完整庞大且条理清晰的军事知识体系。利用通用的“图”语言,以较高的“保真”性表达军事活动中的各种要素及其复杂关系,具有自然直观、高效直接的优势。这种不需要中间转换过程的信息处理方式,避免了问题复杂化和高价值信息丢失的可能性。
(2)军事数据分析。作战任务规划要素图谱一经建立,便可重复为作战任务规划、案例复盘分析等不同军事应用提供支撑。知识图谱及其衍生技术涵盖了知识的建模、抽取、融合、存储、计算、推理和可视化等方方面面,为军事数据分析提供了技术支撑。图数据存储方式,具有比传统存储方式更快的数据存取速度,可为大规模复杂关系数据计算提供高速响应。从语义角度将各类作战数据进行连接,建立起统一的数据存储与知识表示框架,有利于挖掘战场实体、作战态势、作战行动以及战场事件之间的复杂关联关系。
(3)军事智能决策。作战任务规划要素图谱采用人类可识别的字符串来标识节点、边和属性,其通用的图数据结构又可友好地被机器识别和处理,适用于人机混合决策。图谱的构建过程,正是让机器形成对军事领域的认知和理解;而基于知识图谱蕴含的语义和自定义规则,可进行类脑的探索式分析,以模拟人类思考过程去发现、推理和求证未知的军事知识;通过反复标注和纠错进行交互式学习,不断积累知识逻辑,发挥军事专家的作用。
4 应用示例
以文献[5]中的“联合渡海登陆作战”为例,阐述作战任务规划要素图谱的生成与应用过程。
案例中,本级联合部队的任务为:夺取机场和港口,为后续部队登陆创造条件。根据当前态势和使命任务,联合部队指挥员及参谋机构确定了“开辟水际滩头→跨海兵力输送→夺占岸滩→开辟陆上通道→炸桥阻援→夺占陆上重要目标”的基本作战进程,并初步制定了各作战阶段的作战目的和主要作战任务。同时,根据经验知识,分析相关作战任务及其可能遭遇的敌方威胁、应对敌方威胁可采取的行动措施,分别生成作战事理图谱和任务威胁图谱,如图4 所示。

图4 图谱生成
采用3.2 节中所提出的图谱融合方法,将作战事理图谱和任务威胁图谱融合生成作战任务网络。
5 结束语
作战任务规划要素的合理化描述是作战任务规划的前提。知识图谱作为一种语义网络拥有极强的表达能力,通过构建作战事理图谱、任务威胁图谱、战场实体图谱和单元能力图谱,形式化描述了指挥员头脑中的作战演进过程、任务与威胁之间的隐性推理以及战场中的各类实体和部队单位,从而为机器理解和技术方法融入奠定了基础。应用示例表明,作战任务规划要素图谱化表示方法能够形象且全面地描述所需知识,可直接为作战任务规划活动提供支撑。
猜你喜欢
少林与太极(2022年6期)2022-09-14
北京航空航天大学学报(2022年8期)2022-08-31
军事文摘(2022年16期)2022-08-24
中外文摘(2020年13期)2020-11-12
儿童时代·快乐苗苗(2018年7期)2018-09-03
新城乡(2018年6期)2018-07-09
科教导刊·电子版(2017年32期)2018-01-09
少林与太极(2016年6期)2016-08-05
少林与太极(2015年5期)2015-11-14
月读(2013年11期)2013-08-15