矿井局部通风机神经网络智能调速控制研究
2022-11-12 08:49孙颖
机械管理开发 2022年10期
孙 颖
(晋能控股集团煤峪口矿, 山西 大同 037003)
引言
煤炭是我国当前及一定时期内的主要能源形式,对于煤炭的开采要保证足够的安全及可靠。在煤矿的安全事故中,因瓦斯浓度过高造成的事故占到1/2 以上。瓦斯大量存在于煤层中,工作面的瓦斯分布较多,在进行采掘时,极易造成瓦斯的泄露,若瓦斯气体不能及时有效排除,则容易造成煤矿的安全事故[1]。针对工作面的瓦斯气体,采用局部通风机的方式对工作面进行通风,及时将瓦斯等有害气体排除,输送新鲜的氧气,保证工作面的安全,并可改善井下的工作环境[2]。在煤矿开采时,瓦斯的浓度含量不断变化,对局部通风机的速度要求能够及时准确进行调节。局部通风机的速度调节大多采用公式计算或者定速的方式,调节周期长,且明显滞后[3],在一定程度上造成了电能的浪费,不能依据瓦斯的浓度进行针对性的调节速度,不利于瓦斯气体的有效排出,造成安全隐患。针对矿井的局部通风机系统,采用神经网络的技术对瓦斯的浓度等数据进行分析[4],从而预测所需的风量,并采用模糊控制技术进行通风机风速的智能调节[5],并可节省一定的电能,保证煤矿生产的安全可靠。
1 模糊神经网络调速控制器的设计
对矿井局部通风机进行调速,大多采用PID 和模糊控制的方式。PID 调速方式作为应用最多的算法,其算法结构简单,便于实现。模糊调速能够将人为操作的经验转变为模糊规则的控制方式,对系统的数学模型要求不高[6],适用于复杂的、有一定滞后性的非线性系统进行控制。模糊控制的方式对系统的控制参数依赖性小,控制的速度快,采用大量的模糊语句,提高了系统的鲁棒性。随着模糊控制的发展,在多种不同的模糊模型中,T-S 模型在基本的模糊规则的基础上,对输入空间进行划分[7],形成多个模糊规则集合共同组成控制系统。T-S 模糊控制系统不需要对系统进行数学模型的建立,仅收集系统的过程参数即可,可以依据人工经验进行控制系统的调节,在实际应用中具有较好的控制效果,使用较为广泛。
由于矿井局部通风系统中,瓦斯气体的浓度变化随机,对通风机的速度调节具有较强的非线性。神经网络算法对非线性问题具有较强的处理能力,广泛的应用于各种辨识系统中。神经网络对辨识过程无需进行建模[8],可由神经网络本身进行训练完成,节省了大量的复杂计算所需的时间。局部通风机的调速系统采用神经网络算法作为T-S 模糊控制的前件辨识,可以结合两者的优点,适用于对之后的非线性系统进行描述求解[9]。依据通风机风量的调节原理,T-S 模糊神经网络的控制结构如图1 所示。系统的输入量为控制误差e 及控制误差的变化率ec,模糊控制器的输出为变频器的频率f,通过变频器控制电机的转速,从而调节通风机的转速[10],以实现通风量的调节。输入中给定的转速r 为2 900 r/min,此时相对应的额定风量为625 m3/min。
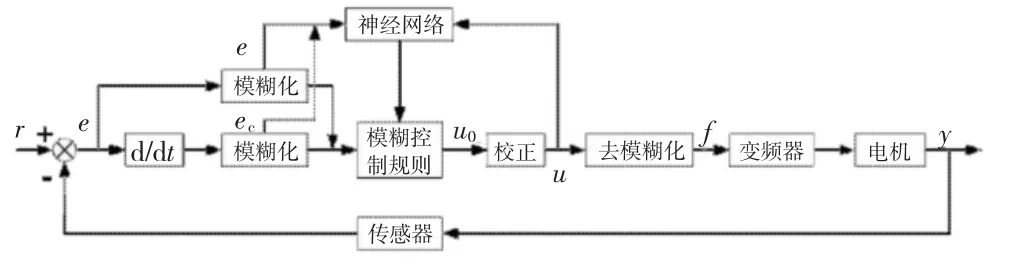
图1 模糊神经网络控制器
2 模糊神经网络智能调速控制系统仿真分析
采用Matlab 对所建立的T-S 模糊神经网络控制器进行仿真分析,建立仿真系统的模型如图2 所示。在仿真模型中,设定相应的参数Ke为0.01,Kec为0.000 5,Ku为24。对T-S 模糊神经网络控制器进行仿真分析[11],将输入参数误差及误差率进行模糊化处理,设置相应的隶属度函数,采用神经网络算法进行辨识,改变模糊化的效果,通过模糊规则计算得到相应的模糊结果,将模糊量转变为控制量进行输出,实现对风速的智能控制。
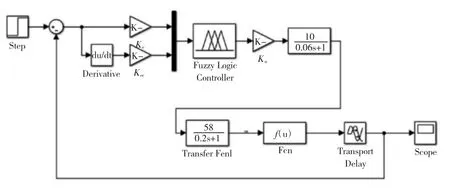
图2 T-S 模糊神经网络控制仿真模型
输入参数误差及误差率采用高斯型的隶属函数,设定数量为7,输出量的隶属度函数采用线性函数。模糊控制的模糊规则中,在输入参数误差及误差率与输出量之间建立多条模糊规则,实现输入参数与输出参数之间的映射。经过模糊化后的输入参数误差及误差率与输出参数,采用神经网络进行隶属度函数的训练,通过神经网络算法不断逼近的能力,经过训练实现输入参数与输出参数之间准确的映射关系,从而使得隶属度函数可通过输入量的变化实现对输出量的准确计算。
对所建立的T-S 模糊神经网络控制系统采用Matlab 进行仿真,经过神经网络200 次的迭代训练后,其误差达到0.078 5,此时可得到系统的风量随调节时间的变化曲线如图3 所示。从图3 中可以看出,系统初始阶段具有2 s 的延时,经过延时之后,系统能够在10 s 时达到稳定的系统风量输出;在20 s 的时间时,系统的风量有所改变,然后在30 s 时,系统的风量再次发生变化。由此可知,经过2 s 的延时后,系统的风量在10 s 内达到稳定值,在系统的条件发生变化时,也能够在10 s 内进行动态的调节,能够在较短的时间内实现智能调速,具有较好的调速效果。
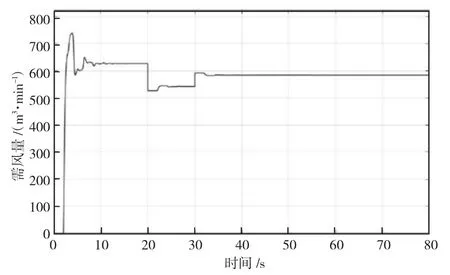
图3 T-S 模糊神经网络控制系统仿真
对所设计的T-S 模糊神经网络控制系统与PID控制系统进行对比分析,经过仿真计算,得到如图4所示的两种控制方式的风量变化曲线。从图4 中可以看出,图中存在5 s 的延时,T-S 模糊神经网络控制调速的超调量较小,调节时间短,相对于PID 控制方式能够更快地依据环境变化达到所需的稳定值。T-S 模糊神经网络控制系统对矿井局部通风机进行调速,可以依据环境的变化进行智能的调速,且调节的时间快,可以随系统的环境变化及时改变转速,从而改变系统的风量,能够保证煤矿工作面的安全,且在生产中可节省一定的电能,保证煤矿的安全稳定。
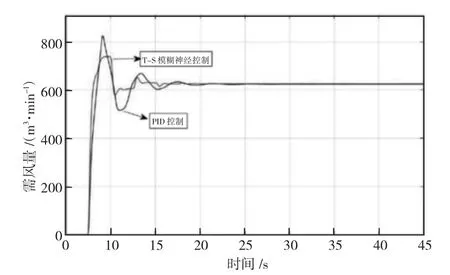
图4 两种控制方式风量调节的对比曲线
3 结语
矿井局部通风机在使用过程中,要依据工作面环境的变化,特别是瓦斯浓度的变化,进行通风机转速的实时动态调节,从而实现通风量的变化,及时有效地排除瓦斯等有害气体,改善工作面的工作环境。针对通风机调速系统的不足,采用T-S 模糊神经网络控制系统作为通风机智能调速控制器,以神经网络算法作为模糊控制的前件参数辨识模型,设计了T-S 模糊神经网络控制调速模型,并采用Matlab 对模型进行仿真分析。结果表明,系统的风量在10 s 内达到稳定值,在系统的条件发生变化时,也能够在10 s 内进行动态的调节,与PID 控制方式进行对比分析,T-S 模糊神经网络控制系统能够更快地依据环境变化达到所需的稳定值,从而实现对通风机速度的智能调节,保证工作面的安全。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
建材发展导向(2019年5期)2019-09-09
山东工业技术(2016年15期)2016-12-01
广西电力(2016年1期)2016-07-18
西南交通大学学报(2016年3期)2016-06-15
现代工业经济和信息化(2016年2期)2016-05-17
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
中国煤层气(2015年2期)2015-08-22