掘锚一体机快速掘进技术研究
2022-11-12 08:49张少鹏
机械管理开发 2022年10期
张少鹏
(晋能控股煤业集团燕子山矿, 山西 大同 037003)
引言
在煤矿开采巷道掘进过程中常常出现采掘失调的问题。传统开采设备主要采用悬臂式综掘机,通过将掘进机与锚杆钻机相匹配来进行。在工作过程中,掘进和支护相互协调进行,出现的问题是钻孔效果不理想,工人的劳动负担比较大,操作工程任务烦琐,且作业过程中成本比较高,大大阻碍了在规定的时间内对巷道的掘进。基于此,针对掘锚一体机快速掘进技术展开研究。
1 2212 巷概况
燕子山矿C3 号层302 盘区2212 巷煤厚5.5~6.7 m,平均6.1 m;巷道设计长度2 540 m,巷道断面宽×高=5.2 m×3.5 m,采用EJM2×170 六臂掘锚一体机掘进。巷道埋深400~420 m,上覆为4 号层采空区(2018 年10 月回采结束),层间距20~25 m。伪顶厚0.8 m,直接顶厚6.45 m,老顶厚28.57 m,伪顶质地为碳质泥岩,直接顶质地为泥岩、高岭岩,老顶质地为粉砂岩、高岭岩[1]。整个巷道通过锚网索进行支护,顶部采用锚杆的数据为Φ20 mm×2 400 mm,每排6 个进行布置,且间排距为1 000 mm、1 000 mm,在帮部使用锚杆的数据为Φ18 mm×1 700 mm,每排3 个进行布置,且间排距为1 000 mm、1 000 mm,2212 巷道支护断面图,如图1 所示。
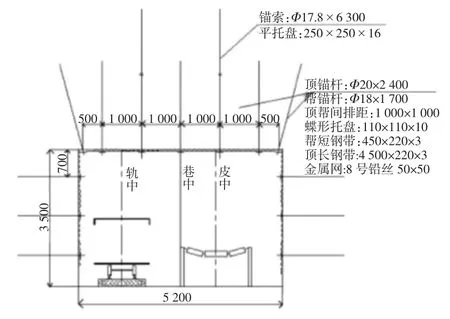
图1 2212 巷道支护断面图(单位:mm)
2 EJM2×170 机组及主要特点
2.1 EJM2×170 机组
EJM2×170 掘锚机主要包括防尘系统、铲装系统、电器系统、截割系统、驱动系统等,如图2 所示。
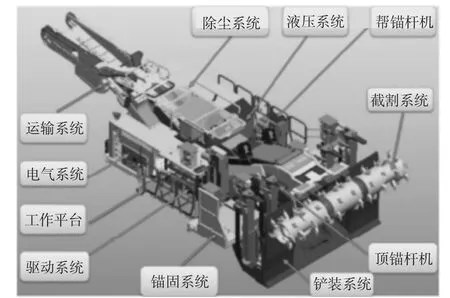
图2 EJM2×170 掘锚一体机整机图
EJM2×170 掘锚机的详细数据为:机体总质量为85 t,机身总长为12.09 m,截割深度为3.3 m 左右,依据巷道的相关设计可以相应地设置截割的参数。掘锚机的工作功率为650 kW,如表1 所示为掘锚机的相关参数。

表1 EJM2X170 相关参数
2.2 主要特点
2.2.1 割煤快,成型好
掘锚一体机中滚筒形状与过去有所改进,采用圆柱形的滚筒,在一体机中共采用两个伸缩滚筒和三个截割滚筒,通过对巷道掘进的实际情况来设定具体的滚筒宽度。在进行掘进的过程中,采用全断面截割的方式,能够明显提高工作效率,且掘进后的巷道成型好。如表2 所示,为截割部位的参数。
2.2.2 支护快,质量高
锚杆机部是由侧帮锚杆机、顶板锚杆机、操作平台架构起来。其顶板锚杆机的位置处于铲板的后方,其优势是在进行横向排列布置的过程中,能够保证锚杆工作范围最大化。且采用的液压锚杆钻机与之前的钻机不同,传递动力强,支护效果好,保证了掘进和支护可以协调进行工作,从而有效地增强掘进速度。
2.2.3 空顶距小
铲板部主要包括从动轮装置、侧铲板、护板、主铲板等[2]。根据对巷道掘进复杂的工作环境下,选择犁式铲板,这样设计的目的是能够大幅降低控顶距,进一步增加了机组和顶板的匹配度。
3 影响快速掘进的主要因素及调整措施
3.1 影响条件
3.1.1 地质条件
对巷道进行掘进时,周边的环境对一体机产生较大的影响,采用掘锚一体机时只能适用于巷道周边地质不复杂的情况下进行。然而在实际操作时,掘锚一体机运转的过程中面对顶板裂开现象,且一体机首部和作业部位之间的位置较小,无法提前对顶板进行预解决。另外,巷道遭遇到断层等影响,产生大范围的硬岩,应该通过安置震动炮的办法去除大面积硬岩,从而能够实现快速掘进的目的。
3.1.2 控顶距
在巷道掘进的过程中,控顶距值大小直接对其工作效率产生影响,站在安全施工的角度看,应该根据掘进情况确定控顶距。当控顶距设置的参数值不高时,例如采用“一掘一支”方式,则需要考虑到停掘的过程,在完成一个支护排距后需要停掘。能够确保在安全工作的条件下,小幅度的提高控顶距,大大加速巷道掘进。
3.1.3 探巷环节
在进行煤矿巷道掘进时,一贯采用的理念是“有疑必探,先探后掘”,通常来说,探放水钻孔超前距有一定的限制,其值不能低于30 m。由于在大同矿机中各区域的煤矿周围环境不同,因此采用的探巷装备也有所差别,投入技术多的探巷设备有效地探测距离长,探巷的次数少,所以在巷道掘进的过程中其受到的影响不大;然而,通常矿井使用的探巷钻机只能在较短距离的范围下进行探巷,而且探巷次数较多,对巷道掘进影响较大,延长掘进时间。
3.1.4 巷道支护
在掘进环境下,巷道支护所耗费的时间占一半以上,较长的支护时间对巷道掘进的影响比较大,不能够短时间内进行高效掘进。为了能够达到高效掘进的目的,且在安全范围内,不断的对支护参数进行修改,减少工作环节。
3.2 实现快速掘进的主要措施
1)采用顶板条件相对稳定巷道。为了保证掘锚一体机在过程的过程中能够有效地发挥巷道掘进性能,应该选择顶板条件简单的巷道进行,这样能够有效地减少巷道受力。
2)设置合理的控顶距。根据不同巷道掘进的实际情况,确定相应的控顶距,可以采用“两掘一支”的方式进行,从而避免停机次数的增加,有效提高掘进速度。
3)采用先进探巷技术。为了减小探掘交叉现象,采用先进的探巷技术,这样能够有效缩短掘进时间。
4)优化支护设计。分析掘锚一体机在对煤巷道掘进中支护时,有效地修改并调整支护参数,采用增加锚杆间距的方式,减少支护时间,进一步提高掘进速度[3]。
3.3 应用情况
在具体应用的过程中,对掘锚一体机运行出现的问题进行修改,可以发现,同忻矿和燕子山矿巷道掘进的整体情况都有所改善,从以下方面能够说明:
1)循环作业。采用掘锚一体机大大缩短了循环作业时长,当采用“两掘一支”的方式时,各个作业环节的时长都有所减小,如表3 所示,其中割煤时间减小到15 min,支护时间减小到40 min,循环时间减小到55 min。

表3 5104 巷循环作业工序各项数据对比
2)巷道成型。掘锚一体机对巷道掘进的效果好,其特有的全断而切割工作方式,与之前采用悬臂式的方式掘进巷道相比,掘进后巷道整体质量好,且效果显著。
3)单进水平。燕子山矿使用掘锚一体机却无法达到预期的性能,分析研究得出由于受到周边地质条件性地设置,才能够实现快速掘进,能够尽可能全面地发挥整机性能。
猜你喜欢
幼儿教育(2022年10期)2022-10-28
山东冶金(2022年1期)2022-04-19
幼儿教育·父母孩子版(2021年6期)2021-08-05
海洋工程装备与技术(2021年2期)2021-02-24
山东冶金(2019年1期)2019-03-30
船海工程(2018年1期)2018-03-01
中国房地产业(2016年2期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
自动化与仪表(2014年8期)2014-03-08
中国质量与标准导报(2014年2期)2014-02-28