
基于柔性摩擦纳米发电机的水下能量收集技术研究
2022-11-11 02:01:02刘翔宇王岩王昊徐敏义
水下无人系统学报 2022年5期
刘翔宇,王岩,王昊,徐敏义
(大连海事大学 轮机工程学院 大连市海洋微纳能源与自驱动系统重点实验室,辽宁 大连,116026)
0 引言
海洋分布式传感器网络在海洋开发和保护中变得越来越重要。大量分布在海面、水下或海岸的传感器实时监测各种海洋参数,包括波浪、潮汐、声波、浊度、盐度、酸碱度和压力等[1-2]。迄今为止,这些传感器以蓄电池供电为主,需要不断地进行充电和更换,维修成本居高不下,因此人们考虑通过收集原位能量为海洋分布式传感器供电。
实现分布式传感器的原位供电是一项严峻的挑战[3]。太阳能和风能等可再生能源已被用于为海上传感器供电,但仍无法满足大量水下传感器的需求。作为海洋中的“原生”能源,波浪能、海流能更适合为大量分布的水下传感器提供动力,因为它们具有广泛的可用性和高密度的优点,且与太阳能或风能相比,数量级更高[4]。目前,采集水下能量的技术形式多种多样,按照其发电原理,大致可分为电磁式、压电式和摩擦电式及复合型方式[5-11]等。随着海洋进入物联网的大数据时代,压电式、摩擦电式发电机成为水下能量采集新形式,在传统电磁发电机的基础上向更深更远的海洋又迈进了一步。
2012 年,王中林院士等人发明了一种利用摩擦起电和静电感应耦合的摩擦纳米发电技术(triboelectric nanogenerator,TENG),因其易于制备、成本低且能高效收集低频能量的特点,现如今摩擦纳米发电机已经被广泛研究应用于收集海洋能量。在Wang 等[9]设计的一项全封闭摩擦纳米波能转换装置的研究中,通过对材料和结构进行优化,低频波浪能被转换成电能并为发光二极管供电,同时将不同的超级电容器充电至额定电压;Xu 等[12]提出了一种塔式摩擦纳米发电机,从6 个自由度收集波浪能;Kim 等[13]展示了一种浮标形摩擦纳米发电机(fabric-based TENG,FB-TENG),它可以在海况下有效地收集波浪能为传感器供电;Xi 等[14]设计了一种用于收集蓝色能量的多功能摩擦摩擦纳米发电机用于收集波浪和水流能量;Xu 等[15]提出了一种耦合摩擦纳米发电机网来有效地收集波浪能,该网络基于优化的球壳结构单元,为大量收集海洋中的提供了一种有效方法。
截至目前,用于收集水下能量的摩擦纳米发电机主要分成两类,分别是收集波浪能和海流能,已经研制或在研的水下能量采集摩擦纳米发电机具有结构简单、成本低等特点,但多数摩擦纳米发电机都是针对海洋表面的能量收集而设计的,为了收集更多的水下能量,文中结合前人研究基础,设计了一种可集成于水面、水中和水下传感器节点的柔性摩擦纳米发电机(flexible TENG,F-TENG),为实现海洋分布式传感器自供能提供新的思路。
1 F-TENG 结构设计与工作原理
1.1 结构设计
如图1 所示,F-TENG 由导电油墨覆盖的聚对苯二甲酸乙二醇酯(polyethylene glycol terephthalate,PET)、导电油墨覆盖的氟化乙烯丙烯共聚物(fluorinated ethylene propylene,FEP)和2 片聚四氟乙烯膜(poly tetra fluoroethylene,PTFE)制成,灵活的柔性结构使其能在水面、水中和水下实时将波浪能/海流能转化成电能。
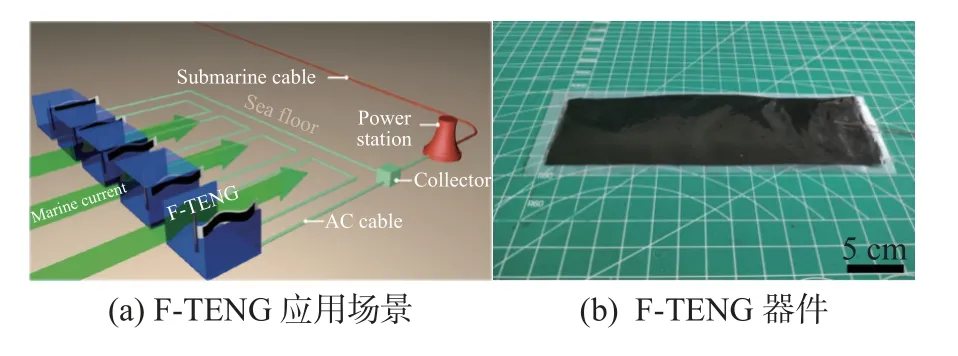
图1 F-TENG 水下应用场景及器件实物图Fig.1 The application and structure diagram of F-TENG
1.2 工作原理
F-TENG 在运动时电极与介电层接触分离进行发电,为探究接触分离的过程,首先建立以下坐标系。
由图2 运动学坐标系,根据接触分离式摩擦纳米发电机工作原理,F-TENG 控制方程为
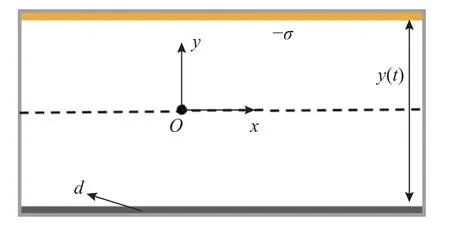
图2 F-TENG 运动学坐标系Fig.2 The kinematics coordinate system of F-TENG

式中:VOC为开路电压;C,Q为发电单元电容与转移电荷;d,y(t),ε,S,σ分别表示电极的厚度、间隙的高度、介电常数、电极与介电材料的接触面积以及电荷密度。
如图3 所示,F-TENG 在波浪/海流激发下产生周期性振动,FEP 膜将定期与PET 膜接触分离。在与涂有油墨的PET 接触后,FEP 膜将带负电。根据静电感应的本质,当PET 的油墨电极与FEP 薄膜充分接触时,等量的正电荷会出现在PET 上的油墨电极。随着F-TENG 弯曲,电子通过外部电路从FEP上的油墨电极流到PET 上的油墨电极,产生瞬态电流。随着FEP 和油墨电极分离,正电荷将流回上电极,于此实现由机械能到电能的能量转换。

图3 F-TENG 工作原理Fig.3 The working principle of F-TENG
1.3 电荷转移及仿真分析
基于上述对F-TENG 工作原理的分析,文中利用基于有限元模拟的COMSOL 多物理场仿真软件进一步计算2 种摩擦材料在不同状态下的电势分布。
图4 为F-TENG 电势分布图,在图中可以清楚地看到颜色划分表明了2 个电极之间的电势差。图4(a)表明在FEP 和导电油墨2 个表面发生接触之前,表面没有电荷的转移,所以整体电势为0。在FEP 和导电油墨2 个表面接触之后开始分离,图4(b)~(c)分离间距最大并逐渐减小,图4(d)开始往反方向运动。上述4 个过程的仿真结果表明,电势分布的变化趋势与F-TENG 发电原理一致。
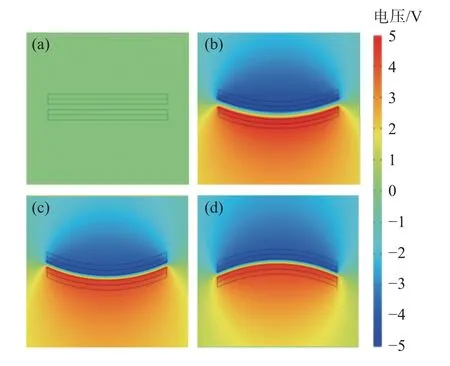
图4 F-TENG 仿真电势分布图Fig.4 The simulating potential distribution diagram of FTENG
2 运动特性分析
由于F-TENG 在水下振动模式为自激振动和受迫振动相耦合,因此在柔性薄膜的振动理论基础上,结合线性电机试验台对F-TENG 的弯曲特性进行进一步探究。
2.1 动力学分析
由于F-TENG 在水下的振动模式为自激振动和受迫振动相耦合,因此F-TENG 可近似看成具有高拉伸刚度和低弯曲刚度的薄膜结构[6],因此建立振动模型如图5 所示。

图5 F-TENG 振动模型Fig.5 Vibration model of F-TENG
图5 中F-TENG 的振动模型为悬臂梁模型,因此可由欧拉-伯努利梁等式来描述其动力学特性[6],即

2.2 振动特性分析
在海洋环境中,F-TENG 受到波浪、海流的激励进行振动,因此在动力学模型的基础上,分别对波浪和海流2 种场景进行仿真实验,实验装置如图6 所示。
如图6 所示,采用线性电机实验台模拟波浪条件,实验范围为40~100 mm 振幅和0.25~1.25 Hz频率;同时采用循环水槽实验台模拟海流条件,实验流速范围为0.133~0.511 m/s。为进一步分析振动特性,引入以下参数如表1 所示。
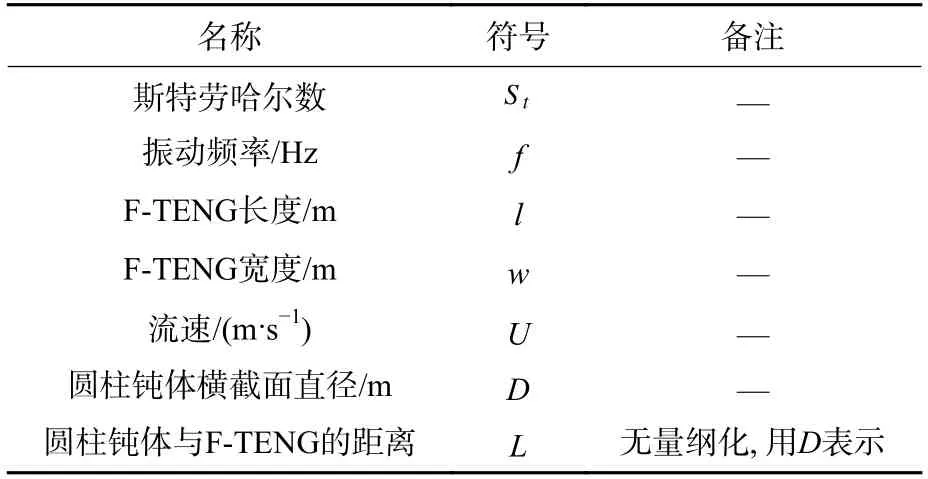
表1 F-TENG 振动特性实验参数列表Table 1 Parameters in vibration experiment of F-TENG

图6 F-TENG 在模拟波浪/海流条件下的实验装置图Fig.6 The experimental apparatus of F-TENG under simulated wave/current conditions
基于图7 和图8 的振动状态展示图,进一步研究F-TENG 的振动特性。实验探究发现,在波浪的条件下,斯特劳哈尔数St<0.18 且长宽比从1 增加到2 时薄膜呈稳定状态(图9(a)区域A),随着斯特劳哈尔数、长宽比的增大,薄膜出现1 阶模态;当斯特劳哈尔数在0.4~1.2、长宽比在2.5~5 时,薄膜开始出现2 阶模态(图9(a)区域B、C)。

图7 F-TENG 在波浪条件下的振动Fig.7 Vibration mode of F-TENG induced by wave
海流条件下,F-TENG 振动方式为自激振动。由于水中粘性力的存在,抑制其自激振动。为加快振幅、提高输出特性,将圆柱形钝体放于FTENG 前方(图8)。通过尾流诱导的方式加快振动,同时引入无量纲参数D,D为圆柱钝体的底面直径,圆柱与F-TENG 的距离通过参数D表示。实验探究发现,在海流的条件下,F-TENG 的临界启动流速随着距离的增加几乎保持不变;当F-TENG和圆柱钝体的距离L超过 6D时振动幅度衰减。由图9(b)可得,为保证更高的振动幅度,需把F-TENG和圆柱钝体的距离控制在1 ~5D。

图8 F-TENG 在海流条件下的振动Fig.8 Vibration mode of F-TENG induced by current

图9 F-TENG 在波浪/海流条件下的振动特性图Fig.9 The vibration characteristics of F-TENG induced by wave/ current
3 发电性能分析
在探究了F-TENG 的振动特性后,进一步研究其输出性能。通过线性电极、循环水洞试验台模拟F-TENG 在不同波浪、海流条件下的发电性能。
3.1 波浪能收集
波浪条件下,F-TENG 振动方式为受迫振动,因此采用线性电机实验台模拟波浪条件,在40~100 mm 振幅和0.25~1.25 Hz 频率下进行多组FTENG 并联探究,分别得出上述条件下的输出性能。实验结果如图10 所示。

图10 F-TENG 在波浪条件下的输出性能Fig.10 Output performance of F-TENG induced by wave
实验数据表明,在40~100mm振幅和0.25~1.25 Hz 范围内,随着振幅、频率的增加,F-TENG的输出性能增加,单个F-TENG 在振幅100 mm、频率1 Hz 情况下达到最大输出性能,最大电压可达24.8 V,输出电流最大达2.6 µA;在多组并联的条件下最大输出功率达79.023 µW。
3.2 海流能收集
海流条件下,置于钝体后方的F-TENG 振动方式为自激振动和尾诱振动相耦合。结合循环水槽,在0.133~0.511 m/s 的实验流速下探究其在海流条件下的发电性能。
实验结果(见图11)表明,在0.133~0.511 m/s 的流速范围内,F-TENG 输出性能随着流速的增加而增大。在外接负载的情况下,单个器件在流速为0.511 m/s 情况下达到最大输出性能,最大输出功率可达9 µW,多个F-TENG 并联的输出功率达到50 µW。

图11 F-TENG 在海流条件下的输出性能Fig.11 Output performance of F-TENG induced by current
4 结论
针对海洋分布式传感器原位供电的问题,文中提出一种用于收集水下能量的柔性摩擦纳米发电机F-TENG,通过COMSOL 软件进行仿真并结合器件水下振动模型重点分析了F-TENG 在波浪和海流2 种不同状态下的振动特性与输出性能,得到如下结论:1) 在模拟波浪条件下,一定范围内,随着斯特劳哈尔数和长宽比的增加,F-TENG 的模态从稳定态变为2 阶模态;2) 在模拟海流条件下,圆柱钝体的存在加快了F-TENG 的振动,一定范围内,F-TENG 的临界启动流速随距离的增加几乎保持不变;当F-TENG 和圆柱钝体的距离超过一定范围时振动幅度衰减;3) 在一定范围内,F-TENG 的发电性能随波浪的振幅和频率的增加而增大,且多个发电单元功率随并联个数的增加而增大;4) 在一定范围内,F-TENG 的发电性能随流速增加而增大,且多个发电单元功率随并联个数的增加而增大。实验表明,多个单元构成的F-TENG 系统在水下能有效采集低频波浪、海流能量,具有巨大的应用前景。同时需要指出的是,目前F-TENG 尚处于实验室研究阶段,后续研究人员将进一步从材料、结构和电路管理等方面对发电机性能进行提升,并结合真实海洋环境条件下探究F-TENG 的耐用性和适用性;与此同时,结合应用实际边界条件,对基于F-TENG 的水下供能系统布置以及效能优化进行深入研究。综上,文中提出的一种柔性、低成本的F-TENG 为实现海洋分布式传感器网络的自驱动提供了新的思路。
猜你喜欢
绿色包装(2022年11期)2023-01-09 11:23:42
绿色包装(2022年9期)2022-10-12 12:18:32
舰船科学技术(2022年11期)2022-07-15 07:54:38
学苑创造·A版(2022年4期)2022-06-18 11:22:44
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03 01:04:00
当代陕西(2020年24期)2020-02-01 07:06:46
中国制笔(2019年2期)2019-11-18 09:28:40
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
测控技术(2018年2期)2018-12-09 09:00:56
上海大中型电机(2017年4期)2017-02-06 05:26:57
