无人机测绘数据处理技术及其应用探讨
2022-11-10 03:45钟金杏缑武龙谢英凯
数字通信世界 2022年10期
钟金杏,王 晶,缑武龙,谢英凯
(1.高州市自然资源局(高州市不动产登记中心),广东 高州 525200;2.广东友元国土信息工程有限公司,广东 广州 510630;3.广州爱远土地房地产评估有限公司,广东 广州 510630;4.广州市华南自然资源科学技术研究院,广东 广州 510630)
1 无人机测绘数据处理技术
1.1 DOM及DEM技术
DOM技术也称数字正射影像技术,该技术按照特定图幅范围,对数字微分进行纠正、镶嵌、裁剪形成数字正射影像集,同时具备影像特征及地图几何精度特点[1]。DEM技术全称为数字高程模型技术,是基于有限地形高程数据,构建地面地形数字化模型(一组有序数值阵列形式),实现数字化表达的一种技术[2]。无人机测绘使用DEM技术的原理是:在空三加密基础上,实现原始影像数据的重采样,生产核线影像,通过系统自动匹配功能与三维离散点相互匹配,得到DSM后滤波处理获得DEM。DEM与DOM相互影响,只有高精准度DEM才能保障DOM的高精度,特别是对一些陡壁、高架桥等特殊区域,需要手动添加特征线,单纯依靠人工镶嵌处理,工作量大,因此要尽可能规避这些建筑物,保障DOM接边精度达标。
1.2 空中三角测量
空中三角测量简称空三加密,是通过航摄影片与被摄对象间的空间几何关系,结合少量已知地面控制点,利用最小二乘法原理,快速求解影像自动加密问题,建立实地模型,获得测点高程与平面坐标的技术手段,是数字测绘产品的核心[3]。在系统中,空三加密应用流程如下。
(1)相对定向,利用计算机视觉算法进行匹配,确定相片关系。
(2)绝对定向,采用像控点+平差计算,将相对定向确定的相片关系解算至特定坐标系统内,建立传感器、影像、地面数学关联。在进行空三计算时,会分别生成地面及空中三空,以地面部分点位为控制点,结合外业实测像控点刚性配准,生成新的空三,然后将地面及空中三空相互结合,优化后获得完整空三测量报告。
1.3 相机校验
无人机在测绘过程中,非测量相机属于必要搭载设备,其主距f和像主点在像片中心坐标系内的坐标位置无法通过直接量测获得,必须预先定好原点坐标。非测量相机在实际应用过程中存在一定不足,如镜头畸变差大、像幅小、数量多。以头畸变差大为例,会导致测量像点坐标偏差,继而破坏像点、投影中心及对应物方点之间的共线关系、物方坐标解算精度等,需要及时采取措施进行校正[4]。常用相机校正方法有自检校法、试验场检校法、多像灭点检校法。
1.4 PPK技术
PPK技术,全称为动态后处理技术,是GPS技术的一种,主要通过载波相位进行事后差分。工作原理是:利用同步观测基准站接收机和流动站接收机观测卫星载波相位观测量,在计算机内利用GPS处理软件进行处理,线性组合后形成虚拟载波相位观测量,确定接收机相互之间的关系,经坐标转换后获得流动站坐标[5]。该技术优势较为突出,主要体现在:①外界环境干扰小;②作业半径大,达到30 km;③定位精度高,精度可达5 mm,误差不传播,不累积,能够获得高精度姿态信息(ψ,ω,κ),应用于空中三角测量中。
2 无人机测绘数据处理技术应用领域
2.1 地形测绘
无人机测绘数据处理技术可应用于地形测绘工作中,主要工作流程是:由无人机摄影获取数据,GPSRTK及全站仪获得外业数据,利用DPS系统、空三加密、相片控制点等处理数据和进行测绘精度试验,确定该无人机测绘方法能满足地形测绘实际需求。以无人机倾斜摄影测绘1:500地形精度测绘为例,作业步骤是:项目任务确定→空域申请→航线设计→无人机航空摄影→数据检查→影像处理→提交结果。在无人机实飞之前,做好前提准备工作,选择适宜摄影时间、起落点位置等,如12月晴朗,适合摄影时间段[6],上报至空域部门进行申请;申请通过后,正式开始无人机飞行摄影。本项目选用Phantom 4 Pro型号的无人机,搭载传感器后进行飞行;在飞行阶段需确定相片重合度、航线、航高等参数,其中,相片重合度可参考相关规范,将航向重叠度和旁向重叠度分别控制在60%~80%、15%~60%;航高(H)需要计算得出,公式为

式中,f为镜头焦距(mm);GDS为地面分辨率(1:500地形图地面分辨率不超过0.05m);a为像元尺寸大小(mm2)。
无人机航空摄影完成后,通过数据预处理、空三加密、立体测图等处理后,构建实景三维模型,绘制地形图,完成地形测绘工作。具体如下。
(1)数据预处理。将拍摄到的正射、斜射影像导入软件,自动检查摄影信息,去除不合规影像,添加相机参数,完成相片自动矫正[7]。编辑控制点,注明控制点位置信息,添加对应影像,点击保存后进行空三解算,完成数据预处理。
(2)空三加密。该地形图为1:500,在前期摄影过程中,完成空三加密信息、相片控制点信息、测图信息等搜集工作,以测量控制点位标准,对数据进行精度分析。在对具体空三加密量测控点期间,要综合判断点位位置,筛选处个别错点、上下航线同名目标等,保障点位准确,并严格控制相对定向环节连接点上下视差中误差。分析发现,空三加密点最大高程及平面误差为0.2 m、0.163 m,中误差分别为+0.1 m、+0.04 m;在进行检点数据分析的过程中,发现高程及平面的最大误差、中误差分别为0.27 m、0.237 m,0.13 m、+0.105 m,误差值均在行业规范允许范围内,说明在空三加密方面,该无人机摄影技术提供的技能,能够满足1:500地形图精度需求。
(3)三维模型及地形图编辑。在系统中加载三维实景模型,结合数字化技术,完成地物要素采集工作,并将对应位置信息与控制点数据相互对比,发现地物要素平面坐标误差为0~0.11 m,中误差为0.06 m,高程中误差为0.07 m,在1:500地形图允许误差范围内,即平面、高程中误差分别<0.2 m,<0.2 m(平原)、<0.4 m(丘陵),均符合地形图测绘精度要求。同时,重视地形图编辑工作,及时修改航内判读不清晰、不准确数据,修改不存在的地貌要素;在对所有图幅进行拼接处理时,需要确保各个线状要素完整,组好街道、街区总接边;及时清理垃圾数据,如多余层、块及线型等;对所有图形均做好图面检查工作,确保数据准确。
2.2 环境监测
无人机测绘数据处理技术在环境监测领域有较为广泛的应用,可用于航测影像快速获取和处理,且获取影像精度高,便于相关人员全面掌握区域环境污染程度和排污情况,增加环境保护工作成效[8]。以空气质量检测为例,在无人机内搭载气体传感器,用于收集各种基本信息,如气体实时浓度、温湿度、PM2.5、经纬度、高度等,显示实时监测数据,勘察历史数据,并生成曲线分析图,便于对比查看,如对100 h内PM2.5、PM10、NO2、CO、SO2等实时监测数据和国控点数据进行比对,确定一段时间内,空气环境质量;还可以通过无线传输方式将数据传输至地面端,进行后续数据处理。工作流程是:打开气体传感器、上位机发送命令、自动识别气体名称和量程、反馈实时气体浓度、处理采集到的各种数据、关闭气体传感器,在这一数据处理环节中,倘若发现气体浓度超标,会自动报警,联系责任人进行处理。另外,在环境监测领域,无人机测绘数据处理技术还可用于固定污染源监测、海洋监测、湿地监测等领域。
2.3 灾情救援
纵观近些年我国自然灾害发生情况,发现灾害发生频率越来越高,如暴雨灾害、地震灾害、洪涝灾害等,屡见报端,各种灾害后救援工作开始成为社会各界关注的重点。在这种情况下,将无人机测绘数据处理技术应用其中,发挥关键作用,不仅能提升救援工作便利性,还能提高救援效率,拯救更多生命[9]。例如,基于无人机测绘摄影的应急数据处理技术,主要使用软件为Pix4Dmapper,包含高精度和快速处理两种模式,可根据实际情况,选择相应模式,完成数据处理,获得测绘产品。项目开展地区为某平原,测区面积共50 km2,在设计规划的航摄区域和航线中,东西方向和南北方向相对航高为2000 m、1000 m,航向重叠70%,旁向重叠40%。采用无人机挂载飞思相机(焦距为50 mm、分辨率为10328×7760)完成数据处理,共拍摄相片数量为171张,10 cm分辨率测区面积为20 km2,相片数为126张;200 cm分辨率测区面积为30 km2,相片数为45张,获得数据导入系统后处理。
该软件数据快速处理流程是:POS数据准备与处理;新建工程,加载相片数据和POS数据;设置处理参数;一键处理数据,输出DOM成果、DSM成果、空三成果、点云数据成果。数据处理完成后,对其成果进行检验。从处理模式及成果看,分别进行1:1000和1:2000成图测试,基于原始数据量进行处理后(1:1000原始数据数据量为28.2 GB;1:2000原始数据数据量为10.1 GB;),发现处理后成图后匹配点数量多且均匀(空三成果),点云加密可匹配得到高密度点云,生成10 cm和20 cm的DOM和DSM,成图精度大大提升。最终生成的测绘产品质量高,图像无扭曲、拉花现象,颜色均匀,放大后,边缘清晰可见,无错位。同时,根据软件生成精度报告可见,无论1:1000还是1:2000,其高程及平面精度均在应急测绘数据处理范围内,如1:1000成图高程精度<0.643 m,平面精度<0.465。但是,两者实际处理效率,对应原始数据大小及输出成果等存在差异(具体见表1),倘若应用于灾害救援,对精度要求不高,可适当降低参数要求,提升处理效率,以便快速获得成果。
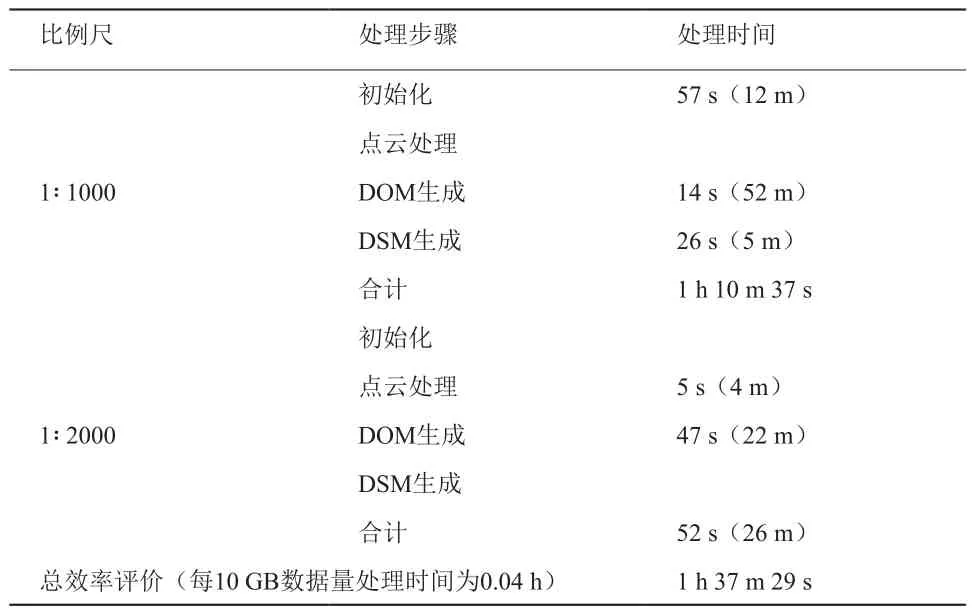
表1 不同比例尺产品数据处理效率及精度比较
3 结束语
综上所述,伴随无人机测绘数据处理技术快速发展,DOM及DEM技术、空中三角测量、相机校验、PPK技术等也随之成熟,技术优势进一步突显,其应用范围也不断扩大,在地形测绘、环境监测、灾情救援等领域中广泛应用,能够用于不同区域数据和信息的有效、快速采集与数据处理,并得到了十分积极的反馈。未来,无人机测绘数据处理技术仍将有极大发展空间,应加强技术研究与实践,最大化发挥其积极价值。■
猜你喜欢
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
电脑爱好者(2020年6期)2020-05-26
作品(2020年4期)2020-05-11
军民两用技术与产品(2019年12期)2020-01-19
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
课堂内外(小学版)(2017年5期)2017-06-07
课堂内外·创新作文小学版(2017年1期)2017-06-01