
基于PLC 的智能分类立体车库设计与仿真
2022-11-09 00:43孙彦超
科技创新与生产力 2022年10期
孙彦超
(扬州工业职业技术学院,江苏 扬州 225127)
随着社会的发展,汽车的保有量逐年升高,导致现有的停车位过于紧张,出现无处停车、乱停车的现象。为此本文设计建立不同类型的车库,由输送带和工业相机搭建智能分类立体车库系统。
1 智能分类立体车库系统的设计
1.1 智能分类立体车库系统的总体设计
入库时,先将汽车停在输送带上,移动至停车点后根据汽车尺寸进行判断,利用码垛机将汽车移动至适合汽车尺寸的位置上;出库时,则是将车取出,送到出库停车点。两者的运转方式是相同的,主要过程就是输运—检测—入库(出库)—到达。系统总体设计原理见图1。本文的创新点是将立体车库车位的布置分为3 个区域,即中大型车停车位、中型车停车位和小型车停车位。车库第一行设置为中大型车停车位;第二行和第三行设置为中型车停车位;第四行和第五行设置为小型车停车位。
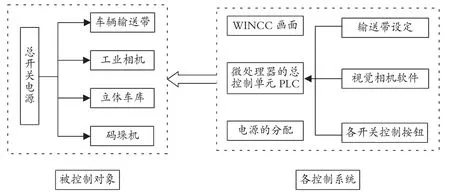
图1 系统的总体设计原理图
1.2 智能分类立体车库系统的硬件设计以及软件设计
1.2.1 硬件设计
1)智能分类立体车库系统由码垛机、车辆输送带、立体车库、工业相机以及人机界面(Human-Machine Interface,HMI)组成,其中可移动的码垛机以不同的运行方式存取立体车库中不同区域车辆。同时,为工业相机设计了主控制柜来完成通信。
2)西门子S7-1200 PLC 和HMI 的本地连接和网络连接,是本系统设计的核心。工业相机收到的信息暂存在主控制柜中,再通过PLC 与PLC 的通信完成数据接收;码垛机的速度和方向控制,使用变频器控制电动机完成。
1.2.2 软件设计
本系统设计的立体车库车位数量为5×8,在硬件组态中,需要的输入点有多个,而西门子S7-1200 PLC 在软件编程中选择CPU 控制器的时候,上面的输入点只有14个,可以直接添加所需型号的输入输出点。程序分为主程序和子程序,在编程过程中对其动作进行分类设计。其中,子程序包括码垛机回原位子程序、手动出入库子程序、自动出入库子程序。在WINCC 仿真界面中增加指示灯提示,故障时显示黄灯,停止时显示红灯,系统正常时显示绿灯。
2 立体车库控制系统的硬件模块选型
2.1 PLC 的控制模块
本文选用的西门子S7-1200 PLC 与其他品牌的PLC 相比,使用更方便,灵活性更高,高速缓冲器和时钟存储器更完善,以太网通信极为方便,指令系统的设计简单合理,并且可以与HMI 进行完美的配合。硬件和网络参数可以采用更直观的图来进行设置,有很强的故障诊断和显示功能,并且支持串口通信。因此,本文选用西门子S7-1200 PLC[1]。
2.2 变频器的选择和CPU 的卡件配置
1)变频器选用SINAMICS G120 CU240E-2 PN(-F)V4.5,使用灵活,维护方便,支持对硬件模块热插拔,可以拆卸接线端子,并可以直接安装在码垛机的控制柜中。
2)每个车位传感器都有规定的I/O 地址,输入到控制器的输入卡件中,对车位信息进行总的控制。工业相机检测到信号,判断尺寸信息,并传送给PLC。
2.3 机器视觉系统
本文选用X-sight SV4-30ML 型号工业相机,该机器分辨率高,采集图像的像素精确。无论是曝光方式,还是帧率,都达到了最高要求,满足本系统设计对车辆尺寸判断的需求[2]。工业相机的性能参数见表1。
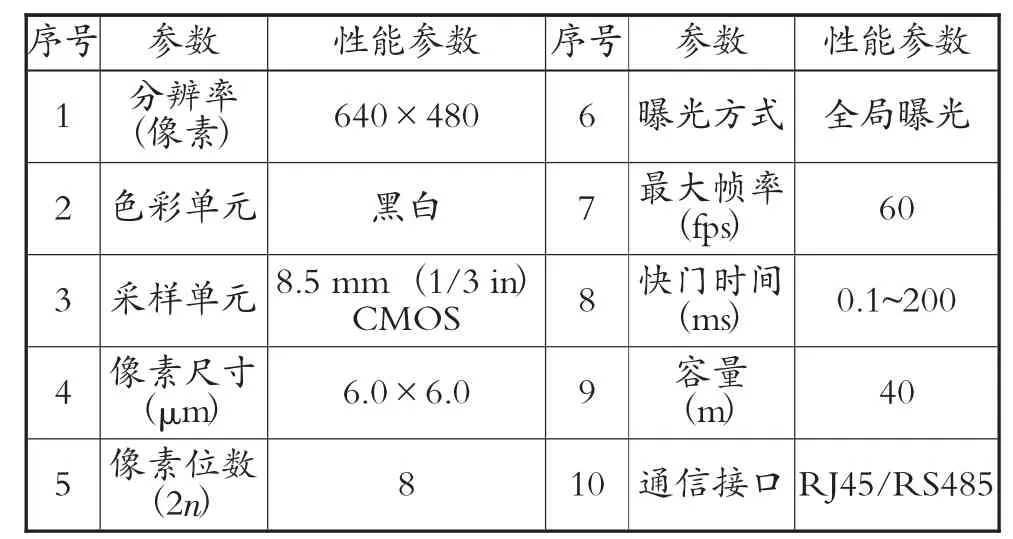
表1 工业相机的性能参数
2.4 I/O 地址分配
本文设计的智能分类立体车库控制系统的I/O地址,即输入变量/输出变量地址分配见表2 和表3。
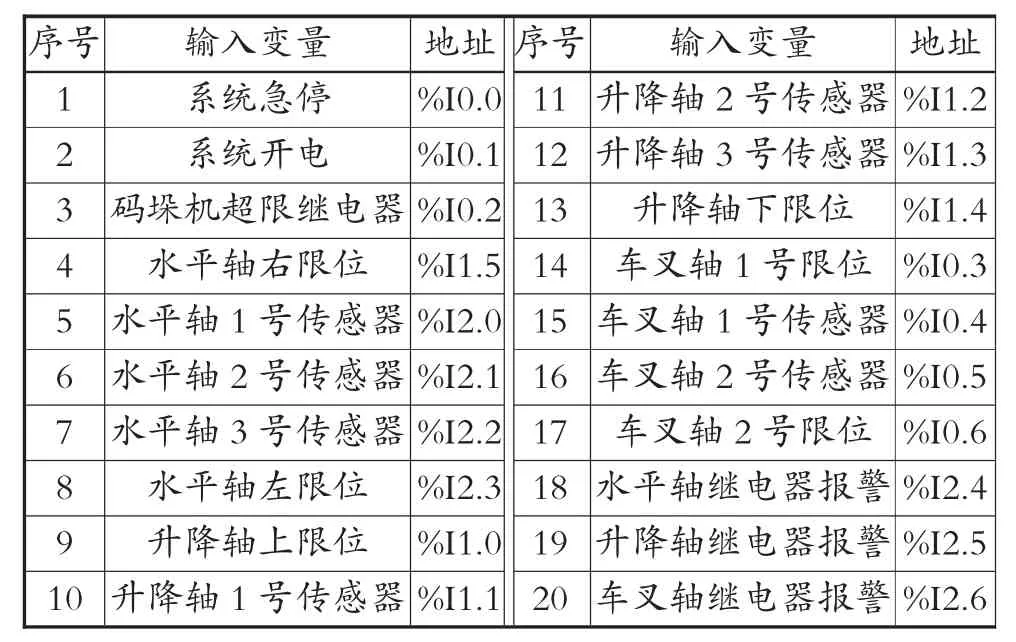
表2 西门子S7-1200 PLC 的输入变量地址分配表
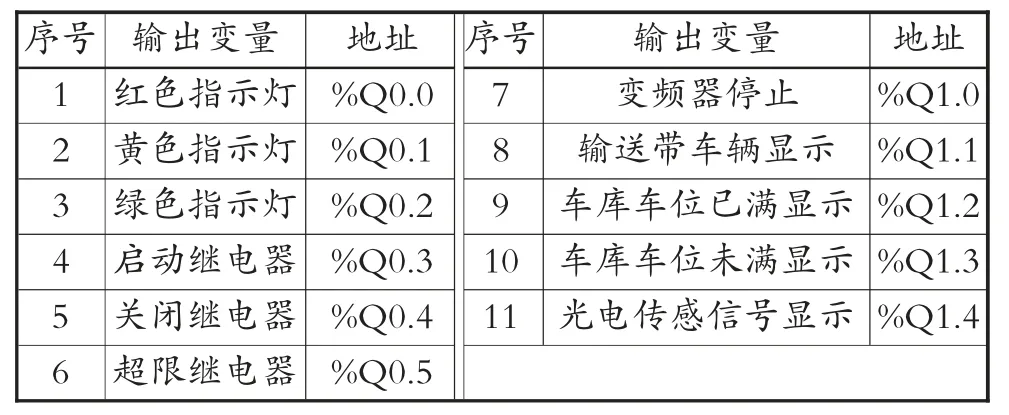
表3 西门子S7-1200 PLC 的输出变量地址分配表
3 立体车库的软件和人机界面的仿真设计与实现
3.1 控制系统的硬件组态
本文的控制系统程序采用博图V16 软件进行编程,分别对西门子S7-1200 PLC、车辆输送带3 个轴的变频器和HMI 触摸屏进行组态。其中,西门子S7-1200 PLC 的IP 地址为198.162.8.12;车辆输送带和水平轴、车叉轴、升降轴3 个轴的变频器IP 地址分别为198.162.8.14,198.162.8.15,198.162.8.16;HMI 触摸屏的IP 地址为198.162.8.112。
3.2 工业相机判断车型尺寸类型设计
在工业相机软件中,将车型尺寸分为3 种类型,通过工业相机对车辆最大长度和最大宽度的判断,将3.5~4.5 m 的车辆停放在小型车停车位区域,4.5~5.2 m 的车辆停放在中型车停车位区域,5.2~7.0 m的车辆停放在中大型车停车位区域。并且通过记录车牌号对车辆进入立体车库的坐标编号进行设定,车主在取车时通过坐标编号进行取车。车型尺寸类型见图2。

图2 车型尺寸类型
3.3 HMI 触摸屏设计
在博图V16 软件中对画面进行绘制,根据本系统设计的要求对立体车库、显示灯和按钮等操作在WINCC 中显现出来。
在开始进行模拟之前,对画面的按钮、每个车位和显示灯进行变量的连接,红色代表无状态,绿色代表有状态或者有信号。点击“系统自动启动”按钮,等待车辆输送带将待入车辆送达停车点。未绑定变量的仿真初始画面见图3;变量连接后的画面见图4。

图3 未绑定变量的仿真初始画面

图4 变量连接后的画面
3.4 智能分类立体车库控制系统的程序设计
系统的主程序主要包括工业相机的判断程序和码垛机的运动控制程序。码垛机的运动方式有前进、上升、伸进、后退、下降和缩退6 种运动方式。需要完成的子程序有左归零的子程序、右归零的子程序、手动模式子程序、自动出库模式子程序、自动入库模式子程序、手动出库子程序和手动入库子程序。这些程序均在博图V16 软件中,通过函数FC 块和数据DB 块调用完成[3-4]。智能分类立体车库控制系统的主程序(Main)中的部分子程序见图5。
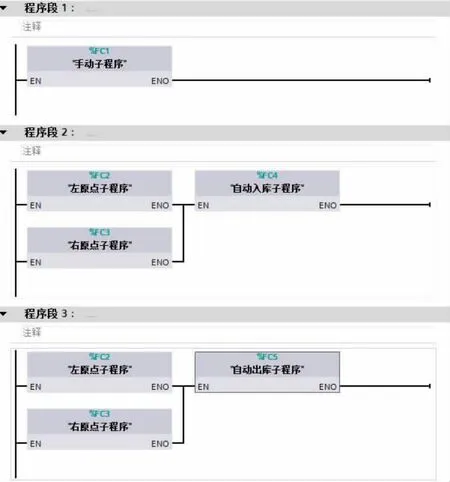
图5 智能分类立体车库控制系统的主程序中的部分子程序图
4 结束语
本文实现了智能分类立体车库系统的软件设计,对其功能进行了全面调试,并且能够准确读取到立体车库不同类型车位的实际存放情况。根据市场调研,目前市场上的部分停车场容量(停车数量)可存放40 辆车,该智能分类立体车库系统设计可在土地面积不改变的前提下,在原有的基础上扩大4 倍的停车数量,节约了占地面积,大幅增加了停车数量,对后续立体车库的建设有一定的参考意义。
猜你喜欢
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
电子制作(2019年20期)2019-12-04
中国特种设备安全(2019年4期)2019-05-20
电子制作(2017年2期)2017-05-17
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
科技传播(2011年24期)2011-08-29
