
基于STM32的THR康复评估系统研究
2022-11-09 03:58张俊林石冬阳
重庆科技学院学报(自然科学版) 2022年5期
贾 兵 张俊林 石冬阳 彭 坤
(重庆科技学院 电气工程学院, 重庆 401331)
0 前 言
全髋关节置换术(THR)是股骨头缺血性坏死、先天性髋臼发育不良、高龄患者股骨骨折、风湿、类风湿性关节炎等的常用治疗方式,可通过仿生髋关节替换病损关节,以促进关节运动功能的重建,进而达到修复目的[1-2]。
目前,常用的康复治疗方法有物理疗法(电疗、磁疗等)、作业疗法、运动疗法、神经促通技术疗法等。考虑到适用性、安全性,本次研究选择运动疗法作为主要康复方法,即用运动的手段改善身体或关节机能[3],避免术后关节活动性能下降、肌肉萎缩等情况发生,保证患者的控制和协调能力快速恢复。运动疗法的部分训练动作示例图如图1所示。

图1 运动疗法的部分训练动作示例图
调查显示,国内外大多数科研工作者把研究重点放在下肢康复训练机器人的结构设计和控制上[4-6],而忽略了对康复评估的研究。现有的康复评估主要通过理疗师目测患者训练过程或结合Harris评分表、关节活动度(range of motion,ROM)检查法及BRSS表等方法进行主观评价[7-9]。这种评估方式不仅效率低下,而且缺少精确的训练数据记录,没有对应的评估模型和完整的评估系统[10-12],不利于制定治疗方案。
针对THR康复训练存在的问题,采用ROM的相关指标,设计并搭建了一种基于STM32的THR康复评估系统,对康复训练效果进行智能评估[13]。
1 康复评估系统的硬件设计
本次研究采用STM32F1精英版为主控板,以F103ZET6为微控制单元(MCU),使用Keil进行代码编译。将康复训练分为屈曲、后伸、外展与内收等3种训练模式,并对其进行评估显示和动作预警。
系统硬件结构如图2所示。电源模块提供5 V电源给MCU,MPU6050模块将采集到的倾角信息准确、实时地传送给MCU。MCU对信息进行处理,并将数据传送给LCD显示,供使用者观察数据的实时变化情况。发声装置待MCU发出控制指令后,进行发声预警。按键模块通过按压触发高低电平,执行相应程序。

图2 系统硬件结构
1.1 角度采集
运动疗法的关键康复指标是ROM,采用MPU6050模块进行ROM检测。MPU6050模块集成了3轴MEMS陀螺仪和可扩展的数字运动处理器(digital motion processor,DMP)。3轴MEMS陀螺仪可对3个方向的角度进行精准检测。
通过Roll轴(Y轴)对屈曲动作进行检测,Pitch轴(X轴)对后伸动作进行检测,Yaw轴(Z轴)对外展与内收动作进行检测。当MPU6050模块工作时,DMP从陀螺仪处接收并处理数据。MPU6050模块放置方位示意图如图3所示。

图3 MPU6050模块放置方位示意图
1.2 屏幕显示设计
本次实验选用4.3寸的TFTLCD彩色屏幕对MPU6050模块采集的关节运动数据进行显示。屏幕采用16位8080并口与MCU连接通信,通过8080总线接口对显示模块进行写入、读取、复位等控制。
1.3 预警设计
对3种训练模式的运动角度进行阈值设定,通过单片机判断动作是否超出范围,由MCU的I/O口输出高低电平信号,控制蜂鸣器发声,达到预警、提示的目的。患者可以通过警示把握关节运动的标准范围,作出相应的动作调整。
1.4 按键设置
KEY0的按键值对应屈曲训练模式,KEY1的按键值对应后伸训练模式,KEYUP的按键值对应外展与内收训练模式,RST是对系统进行复位。当按下按键时,I/O口输出电平信号,系统按照程序执行,跳转到相应的信息反馈界面。
1.5 电源模块
采用5 V直流电源为整个系统供电,通过RS232接口对芯片进行程序调试和供电测试。程序加载到系统之后,也可使用扩展的5 V电源和GND接线柱进行单独供电工作。
2 康复评估系统的软件设计
康复评估系统的主要目的是提高患者的康复训练效果。系统需要精准地测量患者下肢外骨骼的运动参数,并通过LCD进行直观展示,以助于理疗师制定更有效的康复方案。
2.1 髋关节运动特点
髋关节的运动功能主要有前屈、后伸、外展与内收等。髋关节ROM的标准参数示意图如图4所示。

图4 髋关节ROM的标准参数示意图
2.2 评估流程设计
康复评估系统设计了屈曲、后伸、外展与内收等3种训练模式的评估策略。
康复评估策略主要基于ROM检查方法中的评价指标和参数,采用对照式的评估方法,即将患肢康复训练的角度值与ROM标准值(φ)进行比较。ROM标准值如表1所示。
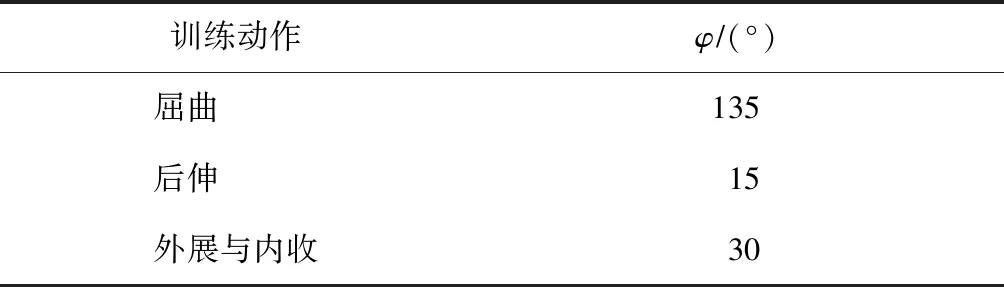
表1 ROM标准值


表2 系统参数说明
首先,在患者进行康复运动时,通过MPU6050模块对动作的方向和角度进行检测;然后,将采集到的数据传送到MCU进行相关参数的记录和计算,并在LCD上进行显示;最后,患者和治疗医师根据评价结果对运动方案进行改进。
(1) 将通过MPU6050模块获取的θ0与φ作比值处理,如式(1)所示:
(1)

(2)
(3)
(4)当患者进行屈曲、后伸、外展与内收等3种训练模式后,得到各种运动状态下的βk,并分别赋予权值(qk)。
γ的计算公式如式(4)所示:
(4)
式中:k=1表示屈曲运动;k=2表示后伸运动;k=3表示外展与内收运动。
当0≤γ<90%时,康复训练不合格;当90%≤γ<95%时,康复训练效果良好;当95%≤γ<100%时,康复训练效果优秀。
3 康复评估系统的实现
3.1 训练动作的判定
康复评估系统除了要实时采集数据,还要通过数据变化情况判断训练动作是否发生。因此,本次研究基于采集的角度数据,分析训练动作特点,设置动作判断条件,判断患者是否发生或完成训练动作。
根据实际情况,分析并定义动作的判断条件。当患者在运动过程中出现了超过一定角度(θ1)的最大值时,则把该值赋给θmax,且当前角度值(θ0)回到初始位姿状态,就可以判定进行了一次完整的运动(θ1>0)。此时,N值加1,保存本次θmax值,进入后续参数计算。动作判定流程如图5所示。

图5 动作判定流程
3.2 初始位姿的判定
将[0,θ1]设置为死区,该角度范围内的运动无效,并将其认定为初始状态区域。这既可以减少患者抖动带来的误判,也可以判断动作开始与否。
根据实验测试效果,θ1的取值为相应动作ROM标准值的3%,在该死区范围内,系统能够有效地判断动作和消抖。
3.3 动作评估阈值
屈曲动作的评估范围为5°~135°,后伸动作的评估范围为1°~15°,外展与内收动作的评估范围为2°~30°。若运动角度超过最大检测阈值,则蜂鸣器发声报警。
4 结果分析
4.1 动作训练数据及评估结果

由此,计算得出总体康复程度的实际值为γ=70.05%,系统值为γ′ =68.86%。

表3 3种训练模式的实验数据
4.2 结果分析

MPU6050模块主要依靠DMP对姿态进行融合,运用积分运算与卡尔曼滤波算法,根据获取的陀螺仪数据计算出3轴角度数据。但角速度积分运算中存在累计误差及角速率零点漂移,5 min漂移0.02°。
在传统的人工康复评估过程中,治疗医师需要对患者的动作行为及肢体感受进行一一询问,依据Harris量表或Merle D′Aubigne 评分标准等进行逐项打分,评估过程漫长且缺乏客观依据。而康复评估系统在患者训练结束后即可得到评估结果,评估效率得到大大提升。另外,MPU6050模块的准确度更高,评估系统能够为患者和治疗医师提供准确、客观、多样的反馈数据,以辅助患者康复。
5 结 语
相较于传统的人工评估方式,基于STM32的THR康复评估系统更加科学、方便、高效。系统能够客观地记录并分析患者康复运动情况,更有利于患者训练方案的改进。
猜你喜欢
中国典型病例大全(2022年9期)2022-04-19
装备制造技术(2020年11期)2021-01-26
中华养生保健(2020年2期)2020-11-16
中华肩肘外科电子杂志(2019年4期)2019-08-24
中国生物医学工程学报(2019年6期)2019-07-16
小学生作文(低年级适用)(2018年3期)2018-04-17
制造业自动化(2017年2期)2017-03-20
少儿科学周刊·少年版(2015年4期)2015-07-07
中学数学杂志(2014年5期)2014-03-01
体育教学(2009年3期)2009-06-04
