采用虚线交通标线进行车辆定位及道路交通设施信息表征的方法
2022-11-04 05:38:34李玉华
公路交通技术 2022年5期
李玉华, 饶 敏
(大连理工大学 建设工程学部, 辽宁 大连 116081)
目前自动驾驶领域通用的定位方式是利用GPS、高精度地图和多种传感器(激光或相机)数据进行信息融合定位[1-2]。通常利用GPS数据初步确定车辆位置,之后利用高精度地图和车载传感器数据实现精确定位。在郊区空旷地区,这类定位方式可行,但在高楼密集区、隧道及高架桥下等2区,GPS信号易受到遮挡,也易遭受电磁干扰和金属屏蔽[3],自动驾驶车辆很难准确获得自身位置信息,自动驾驶和自动导航可能发生中断或行驶错误,严重时造成智能交通系统瘫痪。
针对上述问题,目前主要利用航位推测法[4]来解决。即利用码盘、惯性传感器信息计算位移矢量,再结合初始位置坐标来推算车辆位置,但航位推测法是一个信息不断增加的过程,短期内精度高,随时间增加定位误差会不断累积增大。为了在紧急情况下获取车辆位置信息,一些学者利用一维条形码技术对交通标线进行编码设计[5-6],以表征车辆位置信息,并采用相应的识别方法进行识别,即可获得车辆位置信息,但现有研究主要是在路面已有交通标线的基础上增加其他类型的线条或较大程度改变交通标线的一些基本特性,编码方式没有系统化,且范围较大,只能粗略提供车辆所在车道线处的位置信息,并不能提供较精确的车辆位置信息及道路交通情况的管理信息,大范围普及和应用较困难。
为此,本文设计一种特殊虚线交通标线,仅在虚线交通标线的基础上进行设计,并不增加其他线条,也不较大程度改变虚线交通标线基本特性,采用配套识别程序进行识别就能获得车辆所在位置的多种定位信息以及道路交通设施的多种管理信息,可为智能车辆运输、自动驾驶、无人驾驶、自动导航、智能交通及全息交通[7]等系统提供查询、校核服务。
1 特殊虚线交通标线设计原理
虚线交通标线由固定长度的标线段和固定长度的间隔段交替排列组成,这与一维条形码的组成相似。一维条形码是由不同宽度的黑白条组合而成的特殊标记[8],不同于虚线交通标线的标线段和间隔段固定的交替排列,一维条形码在应用前已完成编码设计,有不同的排列方式,可表达特定信息。将一维条形码技术应用到虚线交通标线,对虚线交通标线进行编码设计,可得到表征信息的虚实线交通标线,即特殊虚线交通标线。
特殊虚线交通标线由标线条单元和路面条单元2种基本单元组成,标线条单元采用《道路交通标志和标线第3部分:道路交通标线》(GB 5768.3—2009)[9]中规定的材料敷设于路表,路面条单元为路表未敷设标线的空白区域,2单元具有相同的尺寸(长度、宽度)。将标线条单元视为二进制数“1”,路面条单元视为二进制数“0”,则特殊虚线交通标线可对应一个二进制数。基于一维条形码编码技术,二进制数可标识字符,具有唯一性。特殊虚线交通标线选取6个基本单元(二进制数)用于单个字符标识,如表1所示,可标识除“I”“O”之外的所有24个字母,数字0~9以及部分符号,利用这些6位二进制数对特殊虚线交通标线进行设计,特殊虚线交通标线可标识由一定数量字符组成的字符串;也可采用更多位数的二进制数对特殊虚线交通标线进行设计,可标识更多字符种类,表征更多类型的信息。

表1 特殊虚线交通标线二进制数编码
2 特殊虚线交通标线设计
为便于识别特殊虚线交通标线,将标线区域依次设为起始区、数据区、数据检验区和结束区,并将固定数量的标线条单元及路面条单元排列组合构成标线数据块,标线数据块对应二进制数为特殊虚线交通标线二进制编码,起始区、数据检验区和结束区由一个标线数据块构成,可分别标识一个字符,数据区由多个标线数据块构成,可标识一个字符串,各区域相互之间无间隔,特殊虚线交通标线结构如图1所示。通过特殊虚线交通标线二进制编码可得到多种标线数据块,进而可设计得到特殊虚线交通标线,将多个路面条单元组成标线间隔区,并与标线区循环设置,即形成了完整的特殊虚线交通标线,如图2所示。
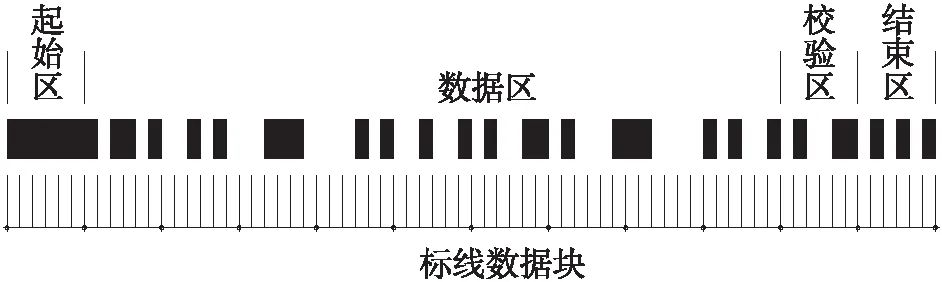
图1 特殊虚线交通标线结构示意
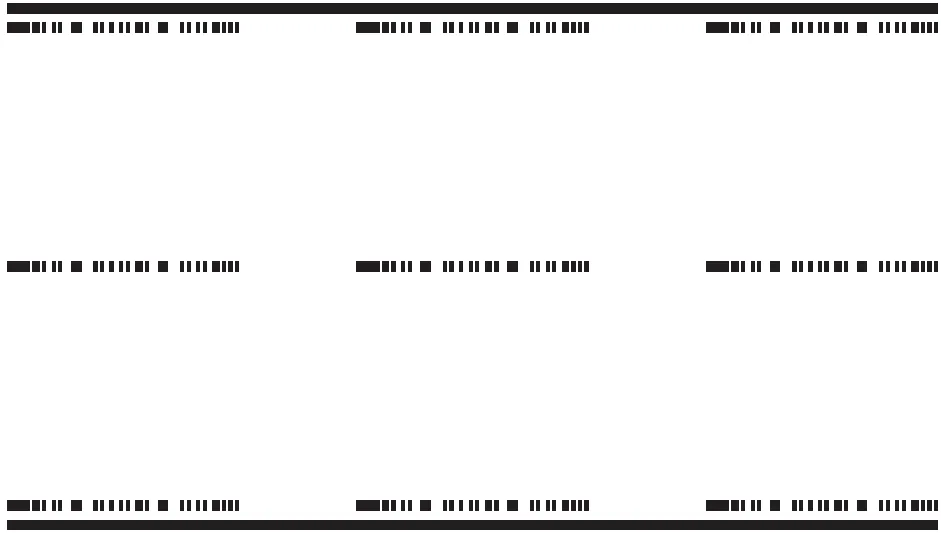
图2 完整的特殊虚线交通标线
在具体设计时,为了将数据区与其他区域区分开,将标线的起始区和结束区的标线数据块分别取连续的标线条单元和路面条单元,分别标识字符“{”“}”,数据校验区的标线数据块标识字符可取一个数字,该数字由数据区数字计算得到,由于车辆位置和道路交通设施信息表示差异,在具体设计特殊虚线交通标线时不设数据校验区,因此特殊虚线交通标线的标线区域可表征字符串“{*******}”。
标线数据块对应一个二进制数,可标识数字、字母及特殊符号,在前文已提出一种6位的特殊虚线交通标线二进制数编码方法,对应标线数据块一种设计类型。但为了在识别过程中能快速判定特殊虚线交通标线的准确性,可对特殊虚线交通标线二进制编码进行纠错设计。限定标线数据块中的标线条单元或路面条单元个数的奇偶性,得到一种具有纠错功能的特殊虚线交通标线二进制编码方法。该编码方法可标识字符总数为30个,仅包含常用的17个字母,每个标线数据块均含偶数个标线条单元及偶数个路面条单元,如表2所示。
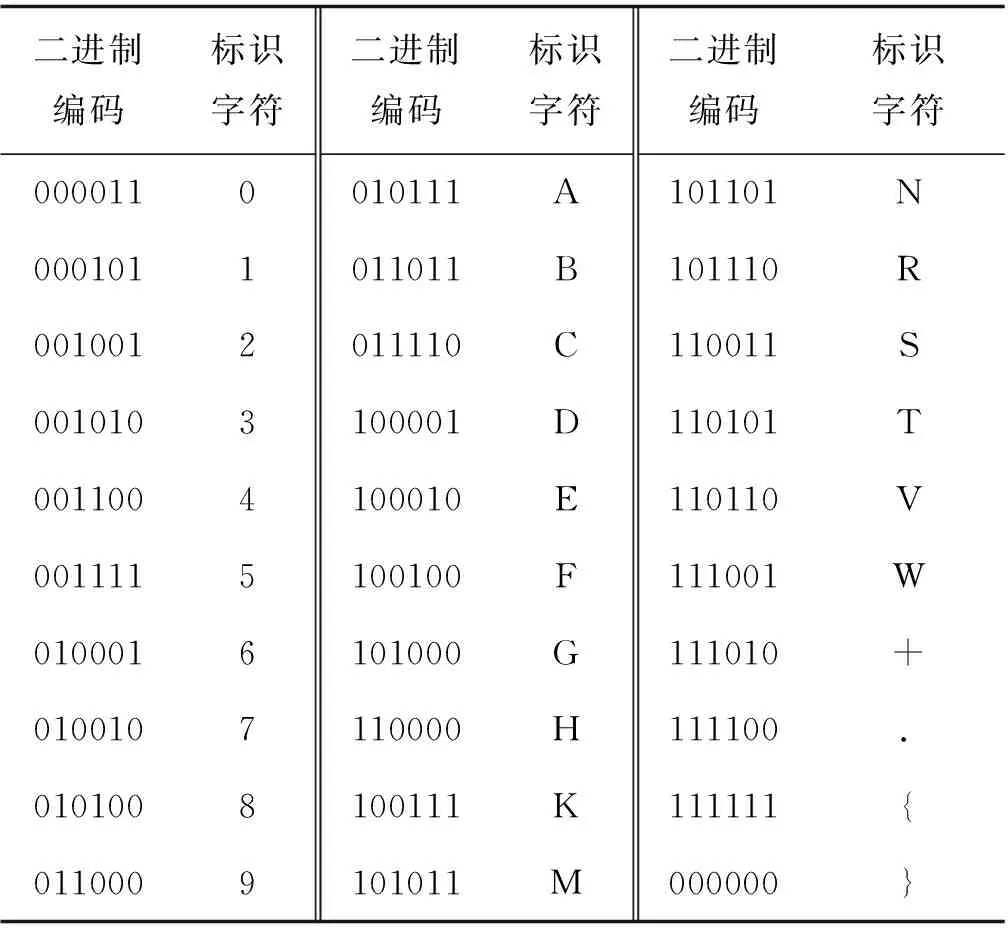
表2 具有纠错功能的二进制数编码方法
为了提高特殊虚线交通标线实线部分连续的视觉效果,可对标线数据块进行优选筛选。控制标线条单元和路面条单元的连续长度,可得到2种视觉效果良好,且便于识别的标线数据块类型和相应二进制数编码方法:第1种编码方法标识字符总数为23个,仅包含10个字母,每个标线数据块均含偶数个标线条单元及偶数个路面条单元,最多只存在5个连续的标线条单元或路面条单元;第2种编码方法标识字符总数为19个,仅包含必要的7个字母,最多只存在4个连续的标线条单元或路面条单元,如表3和表4所示。
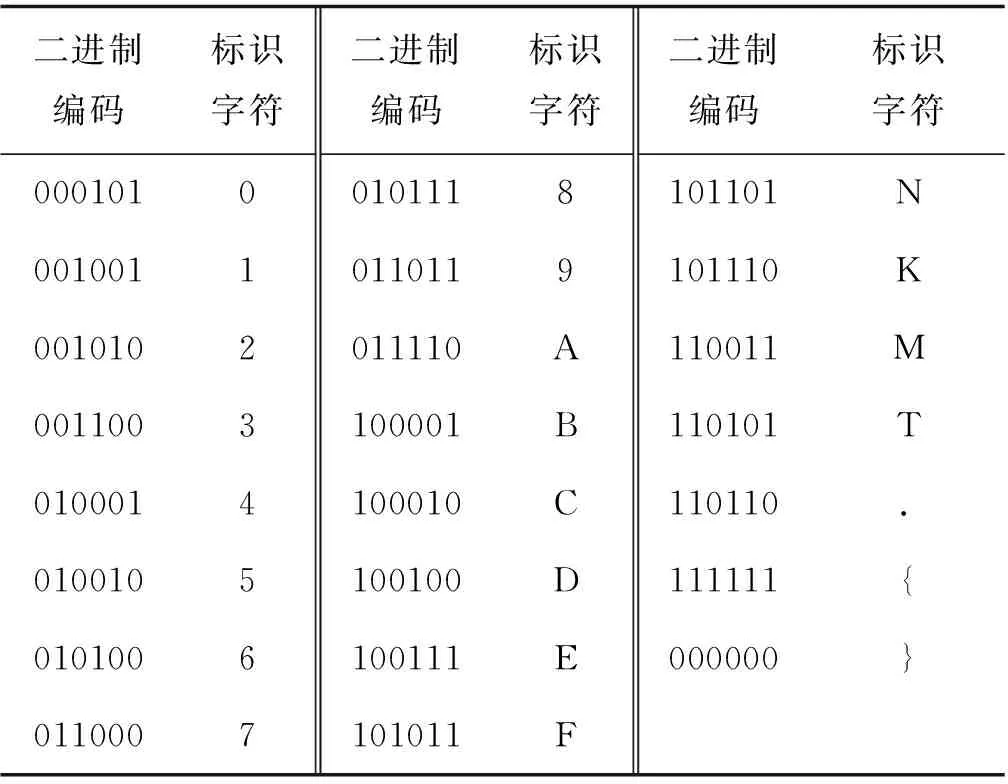
表3 优选筛选后的二进制数编码方法1
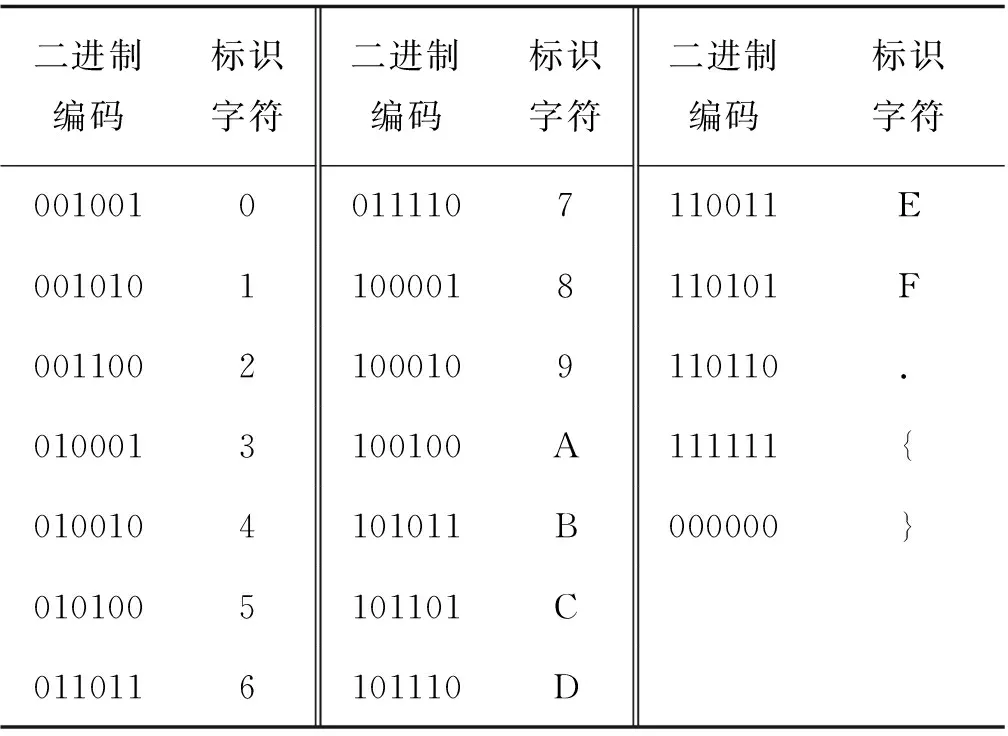
表4 优选筛选后的二进制数编码方法2
3 车辆位置及道路交通设施信息表示方式
特殊虚线交通标线表征车辆位置及道路交通设施信息的前提是将这些信息统一用字符编码表达,现介绍一种车辆位置及道路交通设施信息表示方式。
车道上车辆位置可由世界大地坐标,所属行政区划,路线编号及里程桩号,行驶方向、竖向层位号及横向车道序号确定。但这些信息的常规表达中包含中文(行政区划)、字母及数字(世界大地坐标),并根据上述方法先对这些信息进行字符化处理,后参考相关定义和属性对这些信息进行处理,统一采用类型标识符(字母)加数字的字符串进行表示,各类车辆位置信息具体表示方式如表5所示。

表5 车辆位置信息表示方法
常见的道路交通设施信息主要有道路类型与技术等级、设计速度与当前限速、前方交叉口或出入口提示、前方弯道提示、前方纵坡提示、前方路面类型与状态提示、前方警告标志、前方禁止标志、其他交通标志和其他交通设施信息。自动驾驶系统获得这些信息后可以了解现场道路详细情况,为自动驾驶车辆后续的行驶做出合理决策。这些信息也可采用类型标识符(字母)+数字形式的字符串表达,建立道路交通设施信息数据库,以便于与特殊虚线交通标线建立对应关系。各类道路交通设施信息具体表示方式如表6所示。

表6 道路交通设施信息表示方法
4 直线型特殊虚线交通标线识别
4.1 识别方案
依据条形码和常规标线的识别,特殊虚线交通标线可采用激光扫描[10]和图片处理[11]2种方法进行识别。激光扫描识别需设计专门的扫描仪,识别效率较低,漏检率较高,为此本文采用图片处理方式识别特殊虚线交通标线。先选取几个结构化直线路段,利用前文设计内容实地敷设一定长度的特殊虚线交通标线;之后在不同光照条件下,沿路线前进方向拍摄不同角度下的特殊虚线交通标线,获取识别所需图像数据,由于条件限制,在拍摄过程中利用手持拍摄设备行进方式替代实际的车辆行驶;最后构建特殊虚线交通标线识别程序,对获取的图像数据进行识别,同时验证识别程序的准确性。
根据《道路交通标志和标线第1部分:总则》(GB 5768.1—2009)[12]规定,使用规范外的道路交通标线,要经过一系列流程,耗时较长。为此,本文采用矩形纸块贴于路表、黑色胶带分割一般标线等方式模拟标线的实际敷设。本文选用具有优选筛能力的二进制数编码方法1(表3)进行特殊虚线交通标线编码设计,选用表征车辆大地坐标的字符串设计特殊虚线交通标线。为尽可能保证特殊虚线交通标线虚线特征,特殊虚线交通标线的尺寸数据如下:基本单元长为5 cm,宽15 cm,标线全长为3.0 m和3.9 m,沿路线走向的相邻两特殊虚线交通标线取5个标线数据块长度即1.5 m。特殊虚线交通标线模拟敷设效果如图3所示。

本文特殊虚线交通标线识别方法:1) 对图像进行二值化处理,采用大津法(OTSU)[13]对图像进行全局二值化处理,但在处理前计算灰度图中标线与路表的界限灰度级,剔除路表区域灰度级,界限灰度级计算式为y=-0.010 7x2+3.908 6x-143.47,二值化效果如图4(a)所示。2) 在图像中定位特殊虚线交通标线,先计算标线区域形状特征(矩形度、面积、周长和长宽比等),后利用标线区域形状特征范围剔除非标线区域,再利用剩余区域的形心坐标计算二值图中可能存在的直线,选取一条经过区域最多的直线定位标线区域,定位效果如图4(b)所示。
3) 识别图中特殊虚线交通标线,先利用特殊虚线交通标线起始区和间隔区特征分割定位区域,得到完整的特殊虚线交通标线,后基于透视变换方法[14],构造标线透视变换矩阵,将分割结果调整为俯视图形式,再基于特殊虚线交通标线的设计原理识别标线,识别结果如图4(c)所示。

(a) 二值化图
4.2 识别结果及特殊虚线交通标线实际应用方法
本文利用特殊虚线交通标线识别方法构建完整的识别程序,并随机选取500张不同角度和不同光照条件下的标线图像进行识别,识别准确率为91%,效果较好。对未成功识别的图片进行整合,发现主要为不同光照条件下质量较差的图像,这些图像在识别过程中会造成较多标线区域的缺失,最终导致识别失败。为了能有更高的识别准确率,后续可从提高待识别图像质量方面入手,本文目前只研究了静态或慢速状态下直线路段的特殊虚线交通标线识别,较高速度和更复杂路段的识别方法需进一步研究。
采用特殊虚线交通标线及自动识别方法,可在紧急情况下获取车辆位置信息。在实际应用中,主要实施步骤如下:
1) 利用GPS质量评估模块,计算GPS位置、速度、航向角和全局可靠性指标,根据可靠性指标的大小将其投影到状态空间(GOOD、DOUBT、BAD、ABNORMAL)中,评价GPS数据质量;2) 依据GPS数据质量好坏,判定是否要切换成本文方法获取车辆位置信息;3) 为满足自动驾驶定位需求,还需将本文方法获取的车辆位置信息与高精度地图和传感器的数据进行融合,可利用自适应维纳滤波和卡尔曼滤波[15]实现信息融合。
5 结束语
1) 基于条形码设计的特殊虚线交通标线,整体功能仍符合虚线交通标线的作用。
2) 特殊虚线交通标线,可利用类型标识符(字母)+数字的表示方式,对车辆所在位置的多种定位信息以及道路交通设施的多种管理信息进行统一的数字化表征。
3) 采用本文特殊虚线交通标线及图片处理识别方法,可为自动驾驶提供特殊条件下的定位及信息查询等应急服务,准确率达到91%。
4) 在不同光照和车速条件下获取的图像质量有差异,在程序系列识别过程中会造成标线部分缺失,若标线污损也会造成标线缺失,致使标线识别失败,在下一阶段工作中需研究标线图像质量评价方法及对应的图像质量提高方法。同时,本文只研究了静态或慢速状态下直线路段的特殊虚线交通标线识别,较高速度和更复杂路段的识别方法也需要进一步研究。
猜你喜欢
中学生数理化·中考版(2021年9期)2021-11-20 06:17:36
工程设计学报(2020年2期)2020-05-25 03:00:48
幼儿画刊(2020年4期)2020-05-16 02:53:14
幼儿画刊(2019年2期)2019-04-08 01:23:46
西南交通大学学报(2018年6期)2018-12-18 02:23:20
上海公路(2018年4期)2018-03-21 05:57:46
中国公路(2017年14期)2017-09-26 11:51:45
电信科学(2016年9期)2016-06-15 20:27:30
测绘科学与工程(2014年5期)2014-02-27 07:06:12
科学时代·上半月(2013年9期)2013-09-16 02:11:32