
基于辐射变换的DSM质量改进
2022-11-04 05:57杜文俊龚绪才赵云景刘小军
北京测绘 2022年10期
杜文俊 龚绪才 赵云景 刘小军
(云南省基础测绘技术中心 云南 昆明 650034)
0 引言
数字地表模型(digital surface model,DSM)是在一个规则网格单元结构中高程的数字表示,它代表了所有相关的自然和人为实体的地形变化,包含地物的轮廓和高程信息[1]。目前,DSM是一种重要的、基础的摄影测量数据产品,应用于许多领域[2]。利用DSM不仅能消除地面空间目标的投影误差,还具有更丰富的色彩和纹理信息,是真正射影像进行数字微分和纠正的基础[3-5]。生成DSM的数据可以通过大地测量、光学或雷达卫星影像、无人机(unmanned aerial vehicle,UAV)航空影像以及地面或空中激光扫描采集来完成[6-9]。从经济成本和效率来考虑,有些时候大面积无人机影像生成的DSM将优于由地面激光扫描 (terrestrial laser scanning,TLS)生成的DSM。但是无人机影像也有自身的局限性,目前无人机影像中参考地形变化的准确性还没有得到解决,虽然可以通过降低飞行高度来提高整体精度,但实际上由于无人机所配备相机的视场角较小,降低高度后会导致出现更多的影像,需要更多的数据处理时间以及存储空间。而且降低高度后,部分影像只能覆盖均匀的区域,例如,植被、水体等,纹理变化较少,这使得特征检测变得困难。另一方面,也可能导致较短的基线和较小的基高比,可能造成空中三角测量不稳定和DSM精度低[10]。此外,在极高空间分辨率的DSM中,小物体,如小洞或小石子会导致更多的离群值,这可能会对DSM的精度产生影响。
目前国内对数字高程模型(digital elevation model,DEM)精度评价的研究较多[11-13],针对影像生成DSM的精度评定以及改进方法开展的研究较少。本文旨在研究通过辐射变换对相对高的空无人机影像的影响,提出了一种新的方法,克服前面讨论的低飞行高度问题,以作为处理更少数量的影像、更少的存储空间需求和更少的计算时间的解决方案,生成与低飞行高度相媲美点云与DSM等无人机摄影测量产品。
1 研究区域和方法
研究区域为云南省怒江州兰坪县通甸镇周边共计3.6 km2的区域,平均海拔2 390 m,并布设了控制点及检查点。
1.1 数据获取
本次研究采集了无人机影像和激光雷达数据。无人机影像航线较密、数据量较大,而且离地面越近,影像质量就越容易受到阴影和光照的影响。因此,本研究的目的是利用一定的影像处理技术,使高飞行高度的无人机影像能够与低飞行高度的无人机影像进行比较。为此,计划进行两次不同的飞行高度测量,采用彩虹4中航时无人机搭载VS-780II机载激光雷达综合航测系统集成了RIEGL VQ-780II激光雷达及PhaseOne iXM-100MP数码相机,同时获取了该区域4 400 m、5 000 m两个高度层的航空影像数据和激光雷达点云数据。
1.2 数据处理
1.2.1影像及雷达数据处理
所有的数据都以相同的研究区域边界剪裁,4 400 m高度JPG格式的影像(命名为4 400 jpg),经过处理生成点云、DSM和正射影像。5 000 m高度TIF格式影像将进行辐射变换。机载激光雷达点云数据(ALS)经过处理后生成生成带有地理信息的LAS格式点云数据及DSM,作为评估辐射变换对DSM精度影响的参考基准。同时将使用16个地面控制点(GCPs)对无人机影像进行地理校正,使用21个检查点(CPs)对数据成果进行验证。
1.2.2影像辐射变换
影像处理是一个重要的研究领域,目前通过进行压缩、恢复、分割等操作来实现。将RGB影像变换为灰度影像,这是一种适用于不同领域的影像处理技术。RGB颜色值在三维XYZ中表示,由亮度、色度和色调属性表示。彩色图像的质量取决于数字设备所能支持的位数所代表的颜色。彩色图像到灰度图像的转换就是将RGB值(24位)转换为灰度值(8位)[14]。
在本研究中,将无人机5 000 m TIF格式的影像使用Python及ArcGIS中的灰度函数(Grayscale)进行计算,分成两种不同的算法。在第一种算法中,将三个波段的光谱值以相同的权重平均,生成TIF格式的影像,见式(1),这一新的单波段影像将被命名为5 000 pan,计算公式为
(1)
式中,S1为单波段光谱值;R、G、B为红、绿、蓝三个波段的光谱值。
在第二种算法中,将三个波段的光谱值按指定的权重平均,生成TIF格式的影像,见式(2)。波段的权重按照数字电视信号标准规定,其中红色为0.298%,绿色为0.587%,蓝色为0.114%[15],这一新的单波段影像将被称为5 000 grey,计算公式为
(2)
式中,S2为单波段光谱值;R、G、B为红、绿、蓝三个波段的光谱值。
当在每张影像上运行这两个方程时,原始的EXIF信息在每张影像上都保持不变。5 000 pan和5 000 grey影像进行进一步处理,生成点云、正射影像和DSM。无人机5 000 m飞行高度的JPG格式的影像数据也使用正常的处理步骤来生成上述所有的成果。
1.2.3点云过滤
数据处理后的第一个产品是基于影像密集匹配带有地理参考的三维点云。三维点云由数百万个点组成,每个点都有北向、东向和高度值。这种三维点云用于进一步的网格构建、DSM和正射影像生成。本文主要从三维点云的精度、完整性和分布等方面分析了三维点云的特性。表1提供了在多个数据集中点云的数量及密度比较。本研究的目的是评估高飞行高度无人机影像通过辐射增强提高精度的效果,因此将5 000 jpg、5 000 pan和5 000 grey三种密集点云产品按一定的空间距离条件进行筛选合并,以增加点云的密度。这个最后的点云文件有25 811 941个可用点云,密度为7.1 pts/m2,这个点云文件将被命名为5 000 Enh。

表1 点云数量和密度比较
在无人机影像处理过程中,三维点云的数量决定了数据成果的准确性,更多匹配点均匀分布在影像上,提高了网格生成和DSM的精度。这种方法的结果是5 000 Enh中点的数量和点密度大于4 400 jpg,而5 000 Enh点云由较少数量的影像生成,并且没有低飞行高度产生的几何问题,进一步生成的DSM,其精度可与基于4 400 jpg的DSM相媲美,分析结果将在后文讨论。
2 结果和分析
本研究的主要目的是在精度方面引入高飞行高度无人机影像来代替低飞行高度无人机影像。为了评估辐射增强对提高精度的影响,将从总体精度和局部精度两个方面来进行比较。
2.1 总体精度
2.1.1点云精度比较
通过在点云上计算一个不规则三角形网(TIN),并经过插值来获取点云高度以此计算点云中相同位置的检查点与点云之间的最短距离(垂直方向)。从图1和表2中可以看出,ALS点云的垂直偏差基本在0 m附近波动,中误差为0.022 m,符合激光雷达的检校精度(0.02 m)。5 000 Enh和4 400 jpg生成的密集点云垂直偏差波动相对较缓,5 000 Enh的更为小一些,而5 000 jpg波动较为剧烈。表2反映出通过辐射增强后生成的点云5 000 Enh精度要更好。
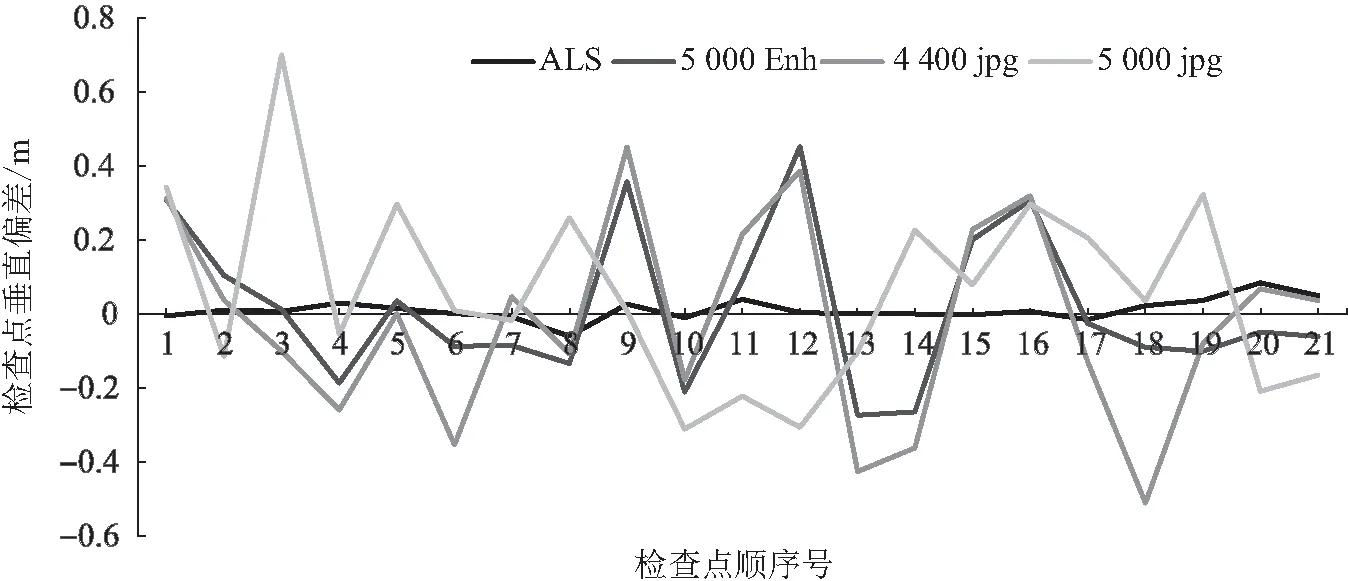
图1 检查点与点云的垂直偏差
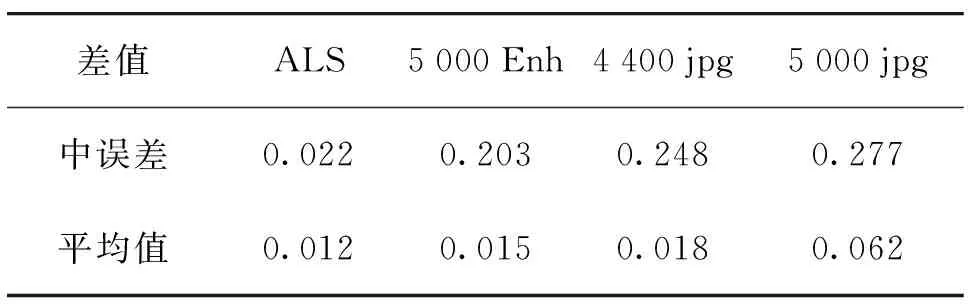
表2 检查点垂直偏差的中误差和平均值单位:m
2.1.2DSM精度比较
在对应数据的正射影像上获取平面坐标,DSM上获取高程值,并通过计算与对应检查点的差值来计算中误差,结果见表3,表3描述了多个数据集中检查点的平面及高程中误差。在DSM精度评估中,高程精度是最重要的,5 000 Enh的高程中误差与4 400 jpg接近,与5 000 jpg相比,DSM的精度提高了0.012 m。结果表明,由于辐射变换,高飞行高度和低飞行高度产品的测量精度相似。

表3 DSM检查点中误差 单位:m
2.2 局部精度2.2.1 点云比较
利用一个5 m×5 m的区域覆盖不同的土地覆盖类别,计算点云中的点数和点密度。表4展示了不同数据中5 m×5 m区域不同地类的点云数量和密度,表5展示了这些点的分布情况。通过比较可以看出,与4 400 jpg相比,5 000 Enh产生了明显的改进结果。

表4 不同地类覆盖的点数量及密度
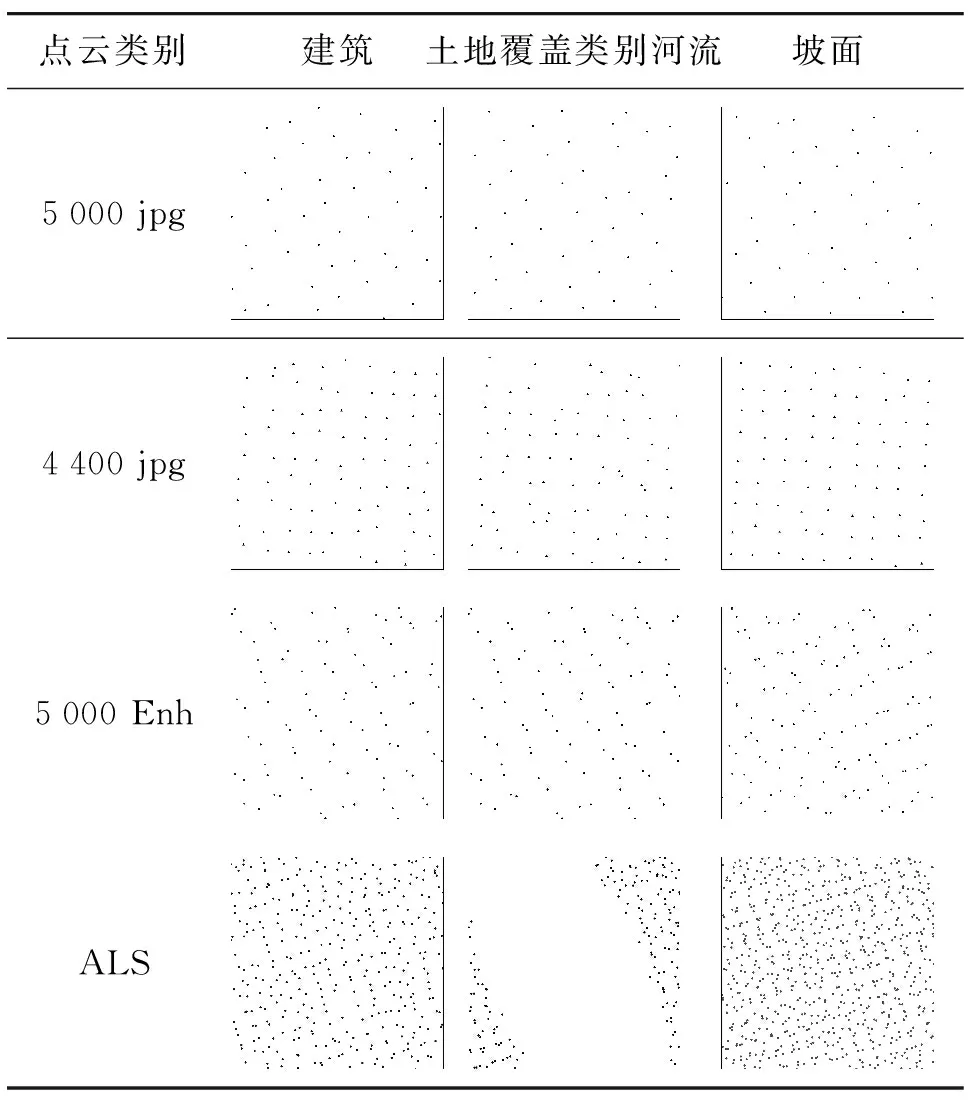
表5 特定区域的点云分布
2.2.2DSM比较
以ALS的剖面作为参考,通过多个DSM的剖面分析,对影像辐射增强效果进行精度评估。在数据中总共评估了12个剖面,选择了其中6个剖面结果,如图2所示,清楚地反映出了本文提出的通过辐射增强对DSM精度的影响。在图2给出的六个横截面中,A1和A2代表建筑屋顶,B1和B2代表河道,C1和C2代表水泥地坡面。
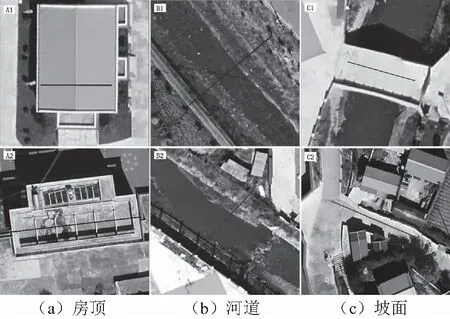
图2 不同地类DSM比较
在图3 A1和A2房顶部分中,5 000 Enh的高程值的变化与4 400 jpg相似,相比5 000 jpg更接近ALS数据,尤其是在房顶区域基本与ALS数据重合;A2部分表现更好,基本反映出了房顶构筑物的变化。在图4 B1和B2中,激光雷达波不能穿透水,但可以准确地显示水体边缘,从而可以测量水位,在无人机影像密集匹配生成三维点云的过程中,由于水的同质性难以识别,但在引入影像处理技术后,生成的数据5 000 Enh中水位的识别优于4 400 jpg和5 000 jpg数据,尤其是在河流底部更为接近ALS数据。同样,在图5中C1和C2在识别坡度模式方面5 000 Enh也要优于5 000 jpg,同4 400 jpg一样与ALS的变化趋势更为接近。
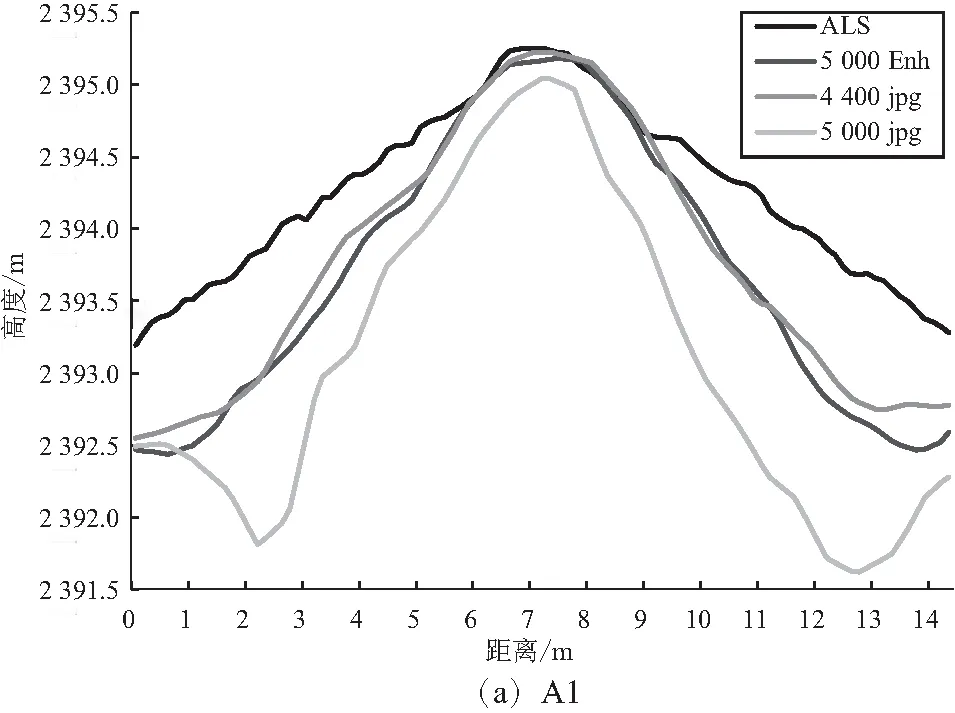
图3 房顶DSM剖面图

图4 河道DSM剖面图
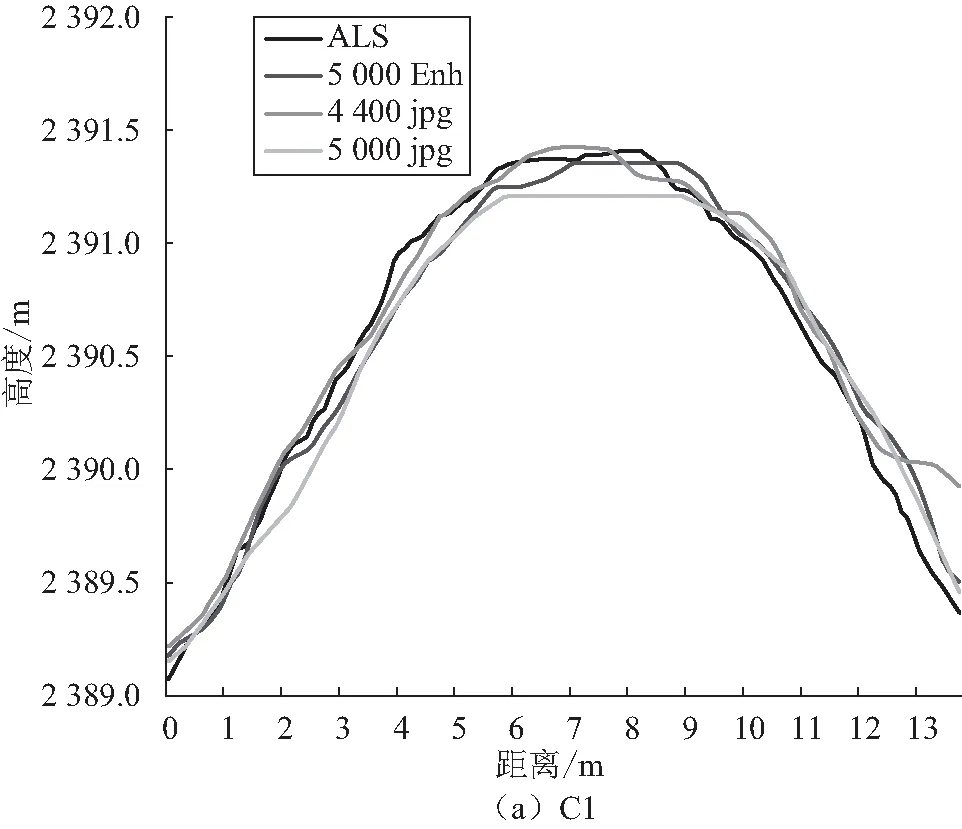
图5 水泥地坡面DSM剖面图
2.3 结论
本研究展示了通过影像辐射变换及GIS技术来提高无人机点云及DSM质量的可能性,总体来看,通过对高飞行高度的影像进行辐射变换后生成的密集点云与相同高度的JPG影像相比每平方米点密度增加了4.76个,与低飞行高度的JPG影像相比每平方米点密度增加了2.79个。增强后的密集点云垂直偏差波动相对较缓,检查点垂直偏差的中误差比相同高度JPG影像生成的点云小0.074 m。增强后生成的DSM的高程中误差较相同高度的DSM降低了0.012 m,基本与低飞行高度的数据精度相当。
无人机影像在水泥地面和水体等纹理均匀的区域被认为精度较低,这是由于SFM过程的第一阶段即影像重叠区域匹配点的识别是基于影像纹理的,因此在纹理变化较大的图像中能自动识别出更多的连接点。而在纹理变化较低的影像中,识别的连接点数量较少,导致点云中的点数量较少。影像增强技术在这些区域也被证明是有效的。在水泥地面区域,增强后的无人机影像相比相同高度的JPG影像,每平方米点密度增加了3.64个,与低飞行高度JPG格式的影像,每平方米点密度增加了2.24个。在水体区域,增强后的无人机影像相比相同高度JPG格式的影像,每平方米点密度增加了3.72个,与低飞行高度JPG影像,每平方米点密度增加了2.44个。
在对不同地类的DSM剖面分析中,增强后的无人机影像生成的DSM的数据质量都要优于同样高度JPG格式影像生成的DSM,基本与低飞行高度JPG格式影像生成的DSM质量相当。
3 结束语
随着技术的发展,无人机已经成为空间数据采集最可靠的低成本工具。本研究探讨了无人机原始数据的摄影测量处理对DSM质量的影响。本文的目标是通过影像辐射变换及GIS技术降低无人机摄影测量的成本,通常使用最简单的算法来评估这个假设,因为灰度图像常用于其他图像处理技术,能使用更少的磁盘空间和计算时间。然而,这种方法的主要问题是,并不是所有传感器都具有RAW格式的捕获能力。而在加权法中,R、G和B的权重可以参考研究区多个特征的光谱响应进行调整。
本研究的结果可用于研究多种图像增强技术对高分辨率无人机数据的影响,以消除由于增加了重叠率后对DSM质量的影响,使其与低飞行高度数据具有可比性。未来还可以研究无人机影像数据在水体中的应用,特别是在污染水体上可以更好地利用影像增强技术,在B1和B2剖面中已经观察到这一点。本研究给出了5 000 m和4 400 m飞行高度数据的比较结果,今后还可以用更低的飞行高度数据对DSM质量的影响进行研究。
猜你喜欢
北京测绘(2022年5期)2022-11-22
计算机系统应用(2022年4期)2022-05-10
汽车观察(2021年8期)2021-09-01
天津医科大学学报(2021年4期)2021-08-21
热带作物学报(2021年1期)2021-02-22
中国交通信息化(2019年1期)2019-03-26
科技信息·中旬刊(2018年9期)2018-10-21
电子制作(2018年16期)2018-09-26
计算机应用(2017年1期)2017-04-17
航空模型(2016年5期)2016-07-25
