外侧导向式APM车辆动力学性能分析及优化
2022-11-02 08:53:02杜子学庹洪铭
重庆交通大学学报(自然科学版) 2022年10期
杜子学,庹洪铭,杨 震
(重庆交通大学 机电与车辆工程学院,重庆 400074)
自动旅客捷运系统(automated people mover system, APM)被定义为城市轨道交通线路制式中的一种无人自动驾驶、立体交叉运行的中、小型捷运系统[1]。APM系统具有噪声小、曲线通过能力强、编组灵活、全自动驾驶等优点。
基于APM系统的车辆一般具有独立路权,根据导向轨道的不同可将APM车辆分为中央导向式和外侧导向式[2]。采用中央导向式APM车辆导向轮安装在走行轮内侧,与凸形导向轨相配合;采用外侧导向式APM车辆导向轮安装在走行轮两侧,与凹形导向轨相配合。由于具有不同的走行结构,这两种APM车辆在行驶过程中的受力状态也具有明显的差异,表现为:这两种车辆前、后走行部均向外侧倾斜(即右侧增载、左侧减载),但走行轮侧偏力方向相反;中央导向式APM车辆只有曲线内侧导向轮受力[3],外侧导向式APM车辆导向轮均由外侧受力。
我国学者的研究主要集中于中央导向式APM车辆[4-6]。任利惠等[2]建立了中央导向式APM车辆系统多体动力学仿真模型,分析了不同导向轮接触状态对车辆动力学性能的影响;宋泳霖等[7]分析了不同回转方式对APM曲线通过性能的影响;李刚[8]利用Simpack软件,对中央导向的胶轮路轨车辆进行了研究。
外侧导向式APM车辆具有系统工程条件优、环境友好、运营水平高、生产及运行成本较低等优点,应用前景十分广阔。因此,为探究外侧导向式APM车辆的动力学性能,笔者结合其结构特点进行了动力学性能分析及优化。
1 APM车辆结构及动力学性能
1.1 APM车辆结构
采用外侧导向式APM车辆转向架结构如图1。该车辆结构由导向机构、走行部、二系悬架系统等组成。导向机构由导向架、导向连杆和导向轮构成,导向连杆一端与走行部中的转向节相连,另一端与导向架相连,导向架四角安装有实心橡胶轮胎,以配合凹形导向轨来实现自导向的功能;走行部的轴桥为自转向车桥,具有自转向功能,由传动轴、差速器、转向节、桥壳等构成,走行轮采用充气橡胶轮胎,并安装于转向架两侧,以实现承载及走行功能;二系悬架系统由空气弹簧、减振器、横向止挡、牵引拉杆、抗侧滚扭杆等构成,均布于转向架中心两侧,起到连接车体并缓和振动冲击的作用。
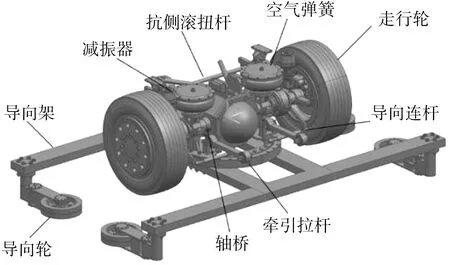
图1 车辆转向架结构
1.2 APM车辆动力学
1.2.1 AMP车辆拓扑构型
根据车辆各部件之间的连接关系,笔者建立了单节APM车辆的拓扑构型,如图2。其中:车体及轴桥有6个自由度,导向架有1个摇头自由度,各轮胎有1个自由度,整车有32个自由度。

图2 单节APM车辆拓扑构型
1.2.2 APM车辆动力学方程
根据APM车辆动力学方程式,并作如下假设[9]:① 将车体、构架、轴桥等部件视为刚体,空气弹簧、减振器等视为弹性元件;② 车辆沿轨道匀速行驶且走行轮不发生脱轨;③ 忽略轮胎变形及车辆载荷对轮胎各刚度特性的影响。APM车辆的空间动力学模型如图3。
APM车辆转向架的运动方程为:
1)沉浮运动方程如式(1):
(1)
2)点头运动方程如式(2):
(2)

3)横移运动方程如式(3):
Ψji)=0
(3)

4)摇头运动方程如式(4):
(4)

5)侧滚运动方程如式(5):
4KDXy(Yji+Z2θji-yb)Z2=0
(5)
式中:Ijx为转向架侧滚惯量;Cy为二系悬架单侧横向阻尼;KG为二系悬架抗侧滚刚度;Ly2为导向轮横向间距之半;Z1为车体质心到走行面距离;Ly1为走行轮横向间距之半。
2 APM系统仿真模型
笔者利用动力学软件MD ADAMS建立了APM系统仿真模型,包括APM车辆模型和轨道线路模型。
2.1 APM车辆仿真模型
车辆主要尺寸参数及质量特性参数分别如表1、表2。笔者根据相关参数和车辆拓扑构型,建立了APM车辆的动力学仿真模型,如图4。模型采用轴套力模拟空气弹簧[10],拉压弹簧阻尼力模拟横、垂向减振器,单向力模拟横向止挡,UA轮胎模型模拟走行轮及导向轮。
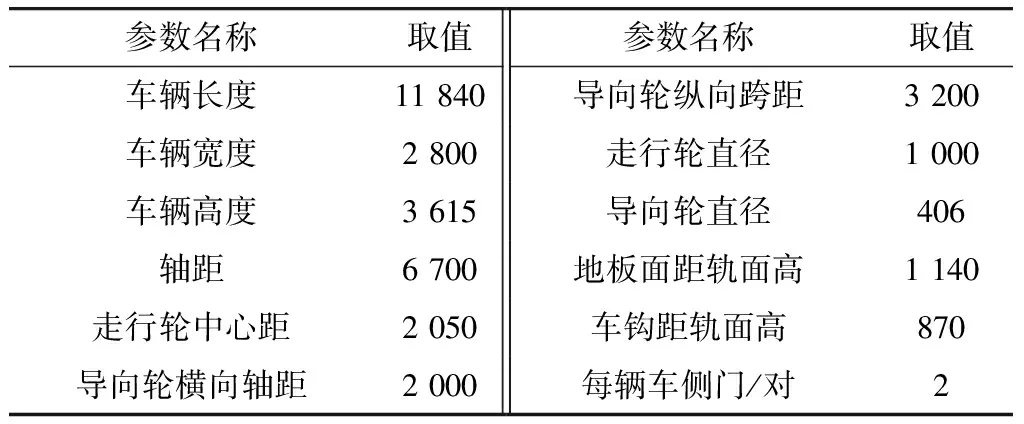
表1 主要尺寸参数

表2 车辆模型质量特性参数

图4 车辆动力学仿真模型
2.2 轨道线路仿真模型
为建立合理的轨道线路仿真模型,需要先确定轨道的超高率、最小曲线半径及曲线限速等相关参数[11]。笔者选择随机干扰路面中的空间功率谱密度(Ge)来模拟走行轨面及导向轨面。参考文献[12]分别建立了A级路面谱的直道模型和曲线半径为50 m、超高率为5%的弯道模型。
3 APM车辆动力学性能
笔者结合文献[13]和跨座式单轨车辆的性能要求,对APM车辆动力学性能进行分析[14-15]。
3.1 车辆曲线通过性
车辆在导向轮预压力为600 N且满载状态下,以20 km/h速度在曲线半径为50 m的弯道上运行时的仿真工况如图5。
由图5可看出:右侧走行轮均增载,左侧走行轮减载,最大走行轮垂向力为86 300 N;轮重减载率最大值为0.083,远小于标准要求的0.8;走行轮侧偏力均小于100 N,能有效避免走行轮的磨耗;右侧导向轮受到轨道激励,径向力增大带动转向架旋转,同时带动转向连杆,最后推动走行轮偏转,导向轮径向力最大值为4 450 N,满足运行安全要求;通过弯道时,导向力矩数值较为适中,能在满足导向性能需求同时具有良好的轮胎磨耗表现[16];车体侧滚角最大值为1.55°,能给人较舒适的主观乘坐感受。
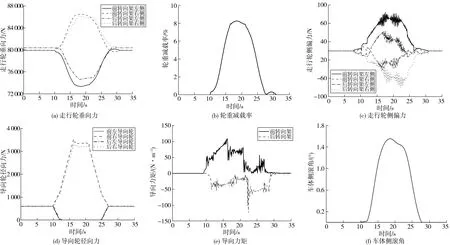
图5 运行时的仿真工况
3.2 车辆运行平稳性
APM车辆在运行中,受到走行轨面和导向轨面路面不平度激励,走形轨面和导向轨面一般为钢筋混凝土路面,故笔者采用A级路面谱进行模拟。在前转向架中心左侧1 m和后转向架中心右侧1 m的地面板上设置测量点,采集其三向加速度值。
采用Sperling平稳性指标进行评价。当指标值小于2.5时,评价等级为优;当指标值为2.50~2.75时,评价等级为良;当指标值为2.75~3.00时,评价等级为合格;大于3.0为不合格。
满载车辆以不同速度在直道模型上运行,其Sperling平稳性指标及评价结果如表3。
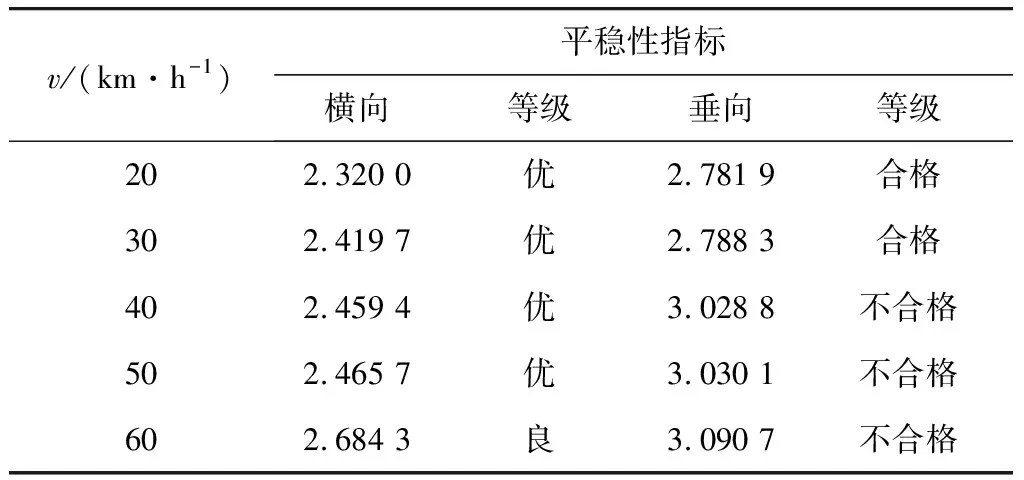
表3 车辆运行平稳性指标及评价结果
由表4可看出:车辆横向和垂向稳性指标均随着车速增快而增大。车辆横向平稳性指标值均小于2.75,评价等级为优或良好;当车速小于40 km/h时,垂向平稳性指标值均小于3,评价等级为合格;车速为40 km/h及以上时,平稳性指标值均大于3,评价等级为不合格。
4 APM车辆运行平稳性优化
为提高APM车辆的运行平稳性能,使得乘客能够获得良好的乘坐体验,笔者通过多目标优化软件Mode FRONTIER进行悬架参数优化。
4.1 灵敏度分析
从APM车辆自身角度而言,二系悬架系统参数对车辆运行平稳性影响最为显著。笔者选取了悬架参数中的空气弹簧垂向刚度、空气弹簧垂向阻尼、空气弹簧横向刚度、横向减振器阻尼和垂向减振器阻尼作为设计变量,并对车体横向和垂向加速度进行灵敏度分析。灵敏度分析模型如图6。

图6 灵敏度分析模型
悬架参数对车体横向和垂向加速度灵敏度系数结果如图7。由图7(a)可知:横向阻尼器对应的影响因子绝对值最大,说明其对车辆横向加速度影响最大,其次是空簧垂向阻尼;所有参数对横向加速度均呈负相关,即减小参数值,车辆横向加速度减小,车辆会获得较好的横向平稳性能。由图7(b)可知:空簧垂向刚度对应的影响因子绝对值最大,说明其对车辆垂向加速度影响最大,其次是垂向减振器阻尼;所有参数对垂向加速度均呈正相关,即增大参数值,车辆垂向加速度减小,车辆会获得较好的垂向平稳性能。

图7 悬架参数对加速度的影响
4.2 优化方法
多目标优化是在多个子目标中进行分析,寻找对多个目标达到最优解的过程。若现实情况复杂多变,当一个目标达到最优,另外的目标没有达到最优时,需要权衡各个目标的分量,尽量让各子目标变成最优。其过程可由式(6)解释。
minfm(x)x=1,2,…,M
s.t.gj(x)≤0j=1,2,…,J
hk(x)=0k=1,2,…,K
(6)

在计算时由于各目标互相影响,故没有一个使各目标都达到最优的解;但当某个解对某些目标较优,从而对其他目标产生不好影响,将这些解称之为较优解。
4.3 优化模型
车辆的横向平稳性评价为较优,垂向平稳性评价为不合格,故笔者将车辆垂向加速度值设为优化目标,同时以车辆横向平稳性指标值为2.5时所对应的横向加速度值0.483为约束条件。优化模型如图8。
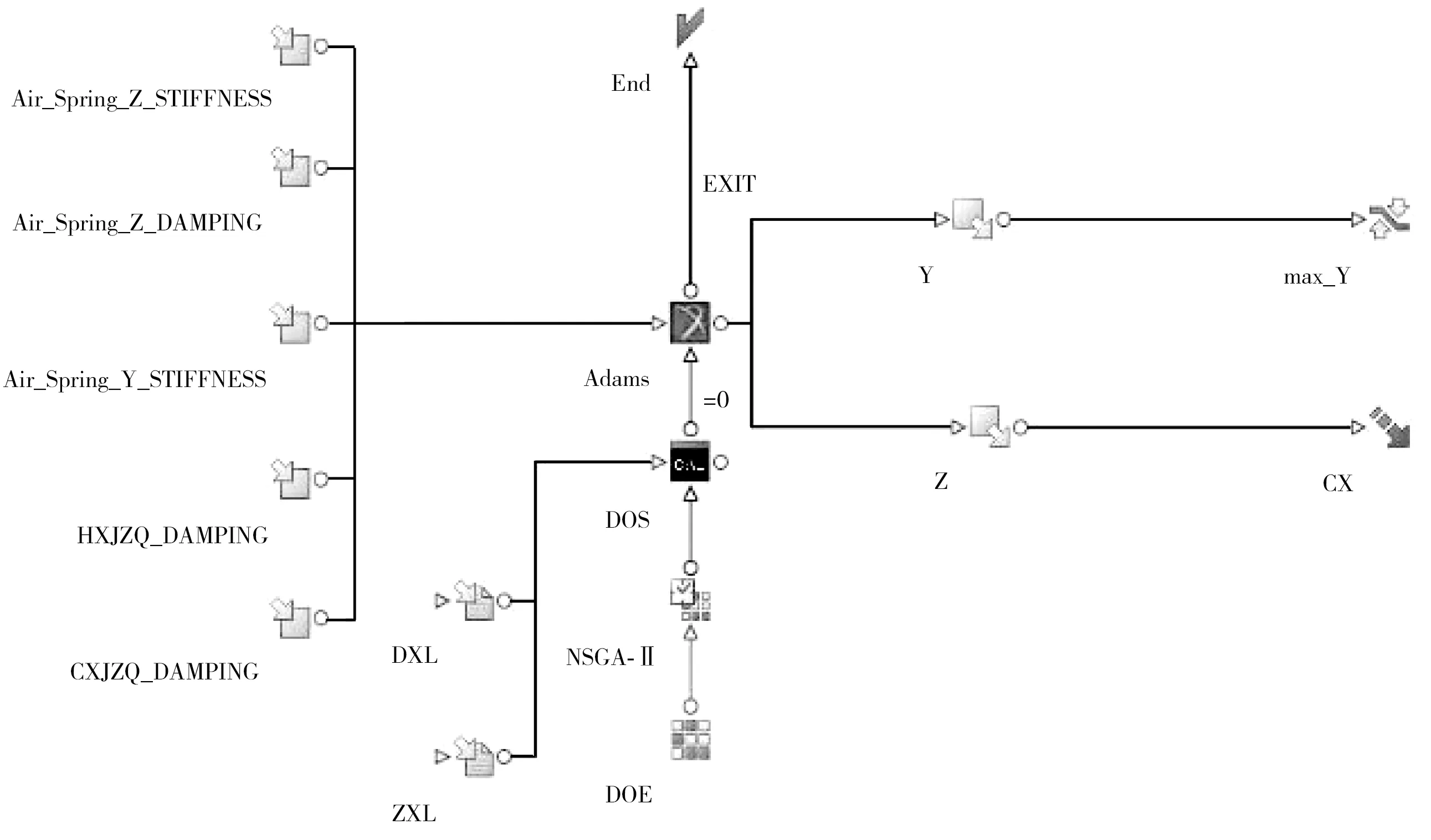
图8 优化模型
迭代过程由DOE生成初始种群,调用准备好的ADAMS输入和支持文件,再由ADAMS程序进行运算,系统判断是否符合条件并输出数据。其中,调用ADAMS支持文件工况为:满载车辆以40 km/h的速度在A级路面上运行。迭代计算500次后,在优化软件Mode FRONTIER后处理模块data analysis中选取垂向加速度表现较好的317#、483#方案为较优解。较优解与原悬架参数方案对比如表4。
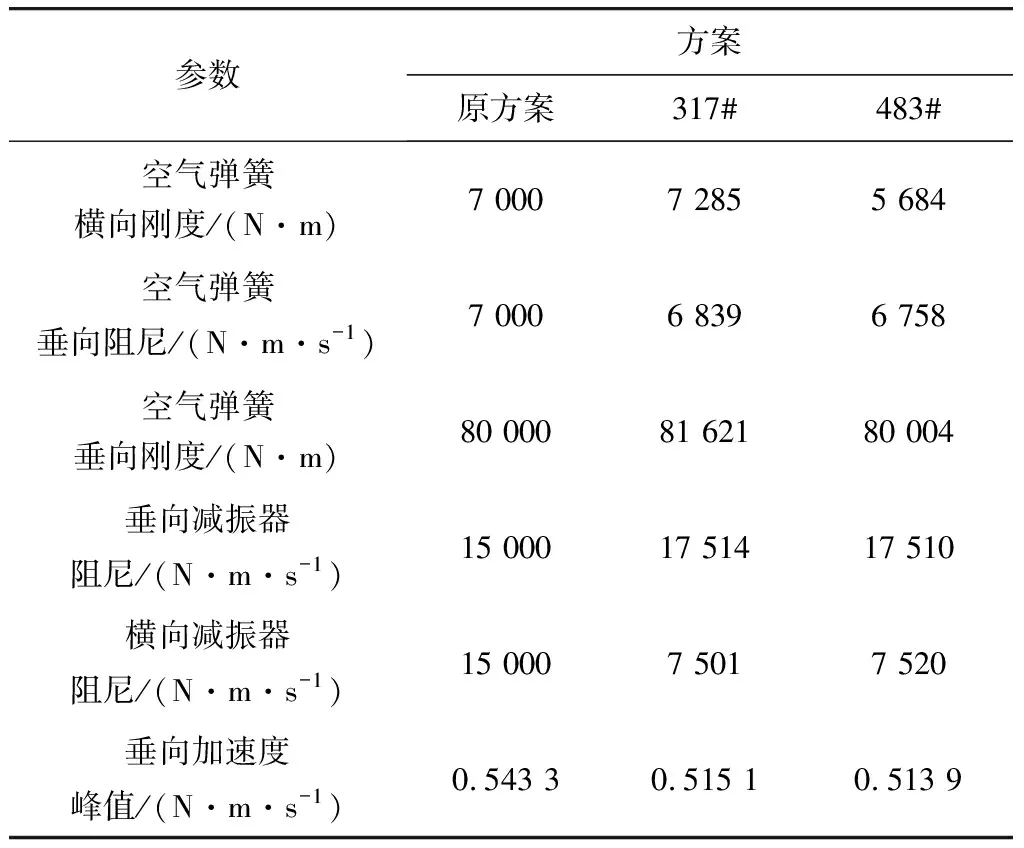
表4 优化前后对比
将317、483#方案对应参数代入Adams模型,进行平稳性分析计算,各方案平稳性指标值对比如图9。
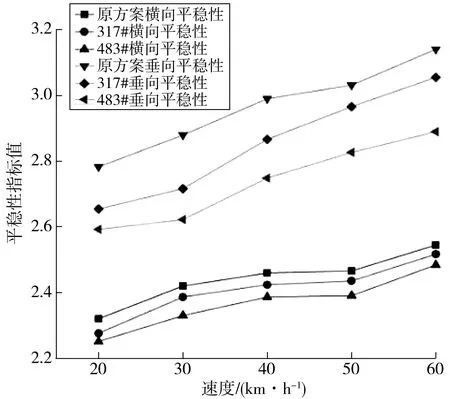
图9 车辆运行平稳性优化对比
由图9可看出:483#表现最优,优化后横向平稳性评价均为优;当车速小于40 km/h时,垂向平稳性指标值均小于2.75,评价等级为良;车速为40~60 km/h时,平稳性指标值均小于3,评价等级为合格。
5 结 论
1)采用中央导向与外侧导向的APM车辆均为右侧增载、左侧减载;两车走行轮侧偏力方向相反;中央导向车辆只有曲线内侧导向轮受力,外侧导向车辆的导向轮均为外侧受力。
2)外侧导向的APM车辆具有良好的曲线通过性能,轮胎受力满足运行安全要求,车体侧滚角为1.55°。
3)优化后的APM车辆具有适宜的乘坐舒适性,其平稳性指标随车速增快而增大。横向平稳性评价等级均为优;当车速小于40 km/h时,垂向平稳性指标值均小于2.75,评价等级为良;车速为40~60 km/h时,垂向平稳性指标值均小于3,评价等级为合格。
4)APM车辆的走行轮侧偏力较小、导向力矩适中,具有良好的磨耗表现。
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:48
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
工程与建设(2019年5期)2020-01-19 06:22:44
制造技术与机床(2019年12期)2020-01-06 03:17:46
西南交通大学学报(2018年5期)2018-11-08 10:58:26
进出口经理人(2017年5期)2017-07-07 13:19:11
兵器装备工程学报(2017年4期)2017-04-28 01:12:36
厦门理工学院学报(2016年1期)2016-12-01 04:50:40
铁道运营技术(2015年3期)2015-12-23 09:27:14
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25 03:00:30