桥梁检测三维激光扫描技术的应用
2022-11-02 08:07:24丁鹏剑
运输经理世界 2022年12期
丁鹏剑
(江西省公路工程检测中心,江西 南昌 330013)
0 引言
桥梁检测工作的实施过程中,应用点云数据建设模型,可以提高检测的精度。这种方式获取各项数据信息,应用三维激光扫描方式完成工作,落实桥梁检测的工作和要求,能够填补传统变形检测不能精确定点测量的检测空白。对于实际测量的数据实施系统化的处理,获得被测量部位上的三维坐标数据,并开展连续性的三点测试,进而可以形成全新的模型框。在检测环节能够定期观察了解结构的变形状况,得出桥梁的使用状态。三维激光技术能掌握足够的数据信息,快速完成模型构建,对提高扫描精度产生积极的意义,在桥梁检测中可以快速地完成形态分析、变形评价,所以在桥梁变形检测领域得到广泛的应用。
1 技术原理与优势
目前的三维激光扫描技术包含多种类型,按照不同的标准进行分类,比如依据空间载体上的差异,将其分为机载、车载、地面设备等;依据不同测量方式,可以分为脉冲式、相位式、光学结构式等。可以结合不同使用情况,选择合适的设备类型。三维扫描技术中应用最广泛的是激光测距技术,通过应用光速水平和垂直角构建点云模型,在通过现场的设备获取相应的时间数据信息和距离信息,然后得出三维坐标数据。
在地面扫描技术中,包含很多组成部分,应加强各个部分和环节的控制,在并根据需要选择合适的扫描头,利用发射、接收信息的装置能够实现快速定位,获取相应的空间位置信息。控制器结构内,以距离测量模块、扫描控制模块和计算机总线作为主要的组成部分,进行反射强度的计算分析,经过分析确定后,获得的信息传输到计算机处理器、存储器内,再开展深入的分析。三维扫描技术获取坐标参数后,首先应确定相应的空间直角坐标系,明确原点,然后明确坐标参数,为后续工作提供基础。在三维模型建设过程中,三维数据坐标的获取可以得出相应的坐标数据信息,从实测定位、遥感测绘、光学测绘等方面出发,收集各个坐标点的数据信息,利用测量程序、三维激光扫描技术,能够准确地建立模型数据信息。经过分析发现,该方式的精度达到毫米级,同时还具备操作便捷、采集密度高、主动测绘等优势,不受外部环境的干扰。应用相机和定位系统可以创建三维实体模型,得到点数数据信息,测量质量和效率比较高、工作强度比较低、作业量较少。
2 桥梁变形的检测方案
某大型桥梁工程设计为悬索形式,跨径尺寸大,对现场施工标准要求较高,技术人员根据实际情况确定检测实施方案,包含下述几个方面:
2.1 检测基准点和检测点的布设
分析桥梁变形数据的环节利用三维激光扫描技术进行,在现场明确基准点。基准点布置时,要确保数据采集准确、精确以及可靠,分析各方面因素,优化数据点的设置,提高系统运行精度。当前,效果最佳的是应用GPS 系统与全站仪测量联合应用,获取坐标参数,然后即可形成变形点数据,对变形量的分析和控制起到积极的作用。
2.2 三维激光技术扫描点云数据的预处理
获取点云数据后,根据系统预定的标准可以完成点云数据预处理工作,还要分析变形量的数据信息,进而可以掌握桥梁变形的情况。预处理点数据是重要的工作,目的是将大量的数据信息中个别冗余数据点去除掉,还可以完成各项点云数据的拼接以及渲染处理。在点云数据处理环节,应做的是优化数据,将各项数据转化为需要的数据格式,使用Micro.Station完成数据处理,获得文本数据信息,并使用相关系统实现数据的优化与改进,提高数据的利用率。
2.3 变形检测数据变形分析方法
预处理工作结束后,得到优化后的数据信息,在系统内直接进行桥梁变形量数据的获取。因为系统获得的点云数据是整体性的,所以通过数据分析和处理即可得到整个桥梁变形的信息,再根据分析软件得到的整体形变数据信息,分析特定范围内的模型信息,最终掌握形变信息,借助LiDARSurvey 可以进行整个区域的隔离性处理,得出点位受力数据,为桥梁优化设计提供基础条件。在变形检测环节,获得的变形数据分为下述几个方面:基于LiDARSurvey 建设点模型,渲染处理后获取相应模型,分为曲面模型与线模型,了解各个模型的变化量,即可得出变形状态信息。
3 技术应用
3.1 控制网测量
某桥梁项目的工程量巨大,是当地重要的交通要道,对整个区域经济发展有重要的影响。整个桥梁项目建设技术水平要求高,施工难度也比较大。该项目的建设总长度为12.89km,包含两座特大的跨海大桥。根据设计方案的要求,该项目选用的是钢箱梁桥梁形式,主跨结构尺寸比较大,引桥设计为预制拼装箱梁形式,采取分节段的制造方式。在桥梁正式投入使用之前,对桥梁实施荷载试验分析,确定是否能够达到正常通行的标准。在对桥梁进行荷载试验分析时,需要进行全面变形检测,只有达到规定标准要求,才能投入使用。在变形检测中,技术人员决定应用三维激光扫描技术开展,并根据需要在现场布置控制点和基准网。利用测绘系统可以开展全面的复核与检测工作,并应用静网观测的方法,形成全面的监控网络体系,对数据获取产生积极的作用。在观测的环节,一般需要观测1h,并进行数据采样,发挥出卫星测量技术的优势,使用卫星数量在4 颗以上,观测1.6个小时以上。为了防止出现严重的偏差,各个基准点都要进行强制对中设置,再获取数据信息,实现全面检测。工作开展中,采用中心连接螺栓的方式固定仪器,将对中偏差限定在合理的范围内。基准点设置工作结束后,应用南方GNSS 接收机对整个桥梁项目实施静态观测。通过控制网二维约束平差与三维自由网平差后,获得各个基准点的坐标、高程数据信息。
3.2 数据采集
结合不同位置上的地形条件,选择合适的三维激光扫描仪设备,以达到数据精度的要求。结合此次测量工作的需要,选择应用RIEGLVZ-400i 设备。结合此次桥梁的变形检测工作的要求,按照如下顺序进行观测设置:
第一,在整个桥梁的西侧位置上,在临江一侧以及屋顶部位上设置基准点,并对桥梁的主缆、吊索、索夹、索鞍、塔柱等进行扫描,了解变形数据信息。
第二,对于测量的东塔、西塔的引桥结构,在桥梁上设置基准点,在定向处理结束后,开展扫描和处理。为了使检核以及拼接作业都能够顺利完成,在每一次基准点布设结束后,都要对整个结构进行重合性扫描,以实现公共面的重合性设置,即可对测量后的点云数据检核确定,明确具体的基准点的精度信息。根据此次设置的东塔、西塔的塔基位置设置纸质标靶,经过扫描的环节,可以进行标靶位置的扫描设定。再应用徕卡精度为0.5s 的全站仪TM50I 测量。根据基准点的设置形式,完成标靶中心测量工作,得到三维坐标数据信息,为后续的激光扫描数据测量和应用起到一定的作用。基准点距离标靶的间距控制在300m以内,在后续的内业处理环节,软件自动识别标靶中心数据信息,并可以快速确定坐标数据信息。因为整个桥梁的尺寸比较大,在荷载试验中,采取分级加载的方式。在整个荷载试验的过程中,温度的变化影响比较大,对各个结构部位的数据信息都会产生很大影响,是难以忽视的,虽然对现场的温度有精确的记录,但是温度场变化有很高的复杂性,应及时做出修正处理。为了避免温度荷载对检测数据信息产生很大的影响,在试验前,应落实24h 的索塔塔偏检测和记录。使用全站仪观测数据,间隔1h 记录一侧塔偏的变化情况。为了快速完成数据校核,索塔顶部需要设置投标靶,再应用三维扫描仪实现观测,快速掌握变形数据信息,了解索塔形变状态。将各项数据传输到内业空间,应用全站仪可以分析数据,并通过对比确定变形量数据信息。
3.3 数据预处理
在此次数据观测和分析中,外业扫描后,系统会接收大量的点云数据,甚至超过10 亿个。但是在操作中,有很多因素产生较大的负面影响,导致数据精度不合格,点云数据内有较多的冗余数据,对数据精度造成不利的影响。因此,需要利用先进技术将冗余数据消除掉,以免给建模造成负面的影响,提高建模的质量。
点云数据处理的环节,先要优化扫描数据信息,通过系统合理做出调整与改进,得出符合使用需要的格式,开展优化处理。自然环境中的光线、温度、湿度等方面要素都会对数据精度产生影响,且在测量中,设备会发生一定的振动、镜面反射等问题,所以应随时关注点云数据拼接,消除数据偏差的影响。在现场扫描工作实施中,因为基准点点位存在限制和影响,并且整个桥梁组成是比较复杂的,无法一次性获取相关的数据信息,因此在方案设计环节,应落实分块扫描操作,再获得各个块区点云数据,然后利用点云数据拼接把各个区的数据整合应用,才能计算确定误差参数,得出拼接精度。整个过程中,只要发现问题,就必须立即解决,以免问题扩大造成严重的后果。系统直接把多余点云剔除掉,并进行数据分块导出。从实际应用效果看,此次应用的三维激光扫描仪获得变形数据时,点云数据的精度控制在5mm 左右。整个桥梁的点云数据拼接工作结束后,即可完成平差整理性处理,从而获得的点云平面与高差偏差不超过1~2cm。
3.4 点云建模
经过数据预处理,通过系统可以完成数据建模作业,构建出符合人们使用需要的模型。使用计算机软件开展建模与分析,通过系统设置的方式,将不同部位的数据进行着色处理,再渲染处理,获取需要的图像,并根据实际应用的要求,删除离散点数据,达到使用效果。在这种条件之下,对系统数据完成降噪,将系统内的冗余数据完全剔除掉,保证点云数据达到平滑性要求,并利用采样功能可以抽稀处理点云数据信息,然后得到相应的采样间隔和曲率数据信息,最终构建出完善的点云模型数据,优化视图。最后,对获得的模型实施“封装”处理,以获取三角网模型。
3.5 点云精度比对
使用高精度的全站仪即可把索塔塔基的坐标参数传输到系统坐标内,与之相应的点云坐标参数对比分析,可以得出表1 的结论。
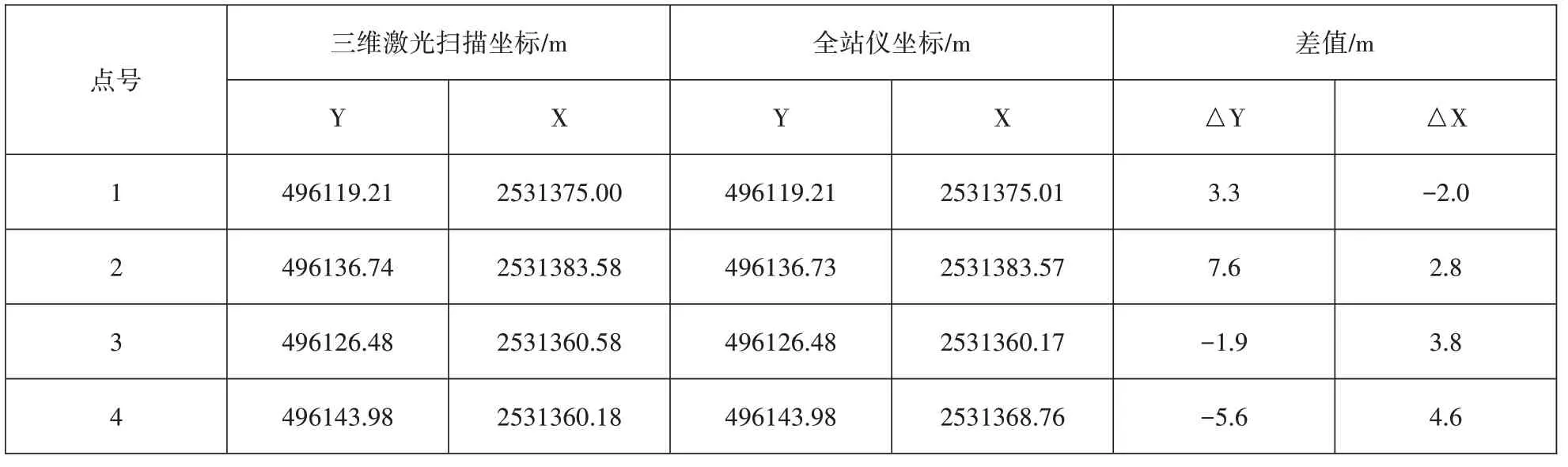
表1 承台坐标对比(部分)
3.6 变形分析
根据此次观测24h 获取的塔偏数据信息,分析确定检测参数值,并进行变形数据对比分析,得出精度数据。经过以上各项处理措施,把获取到的模型信息进行系统化处理,再分析相关的变形数据,可以组合形成模型系统,开展数据信息分析和控制。应用三维数据对比方式,可以快速处理模型信息,以便设计人员快速掌握和了解数据偏差。利用模型图能够真实、准确地反映出偏差最大位置的信息,了解这一要素,就可以确定桥梁应力集中点的位置,掌握局部偏差数据。三维激光扫描技术的最大优势是不需要应用光源即可实现,即使光线不充足,也能顺利实施测量作业,达到精准度的要求。但是在实际测量的环节,由于外部因素的干扰和影响,容易出现数据偏差的问题。
4 结语
三维激光扫描技术主要优势是可以实景复刻,根据需要使用点云数据进行模型建设,数据准确性高。使用三维激光扫描仪可以获取桥梁变形数据信息,进行数据处理后建设完善的变形检测模型,应用范围比较大。随着技术的不断发展,三维激光扫描仪的精度不断提高,一般可以达到5mm 的精度,从而提高桥梁变形检测的效果。本文通过实际案例分析三维激光扫描技术的应用优势,结果表明,点云数据精度达到要求标准,各方面数据符合桥梁变形检测要求。
猜你喜欢
华中建筑(2022年4期)2022-04-14 07:50:52
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
现代测绘(2021年1期)2021-04-28 10:19:56
科学(2020年5期)2020-11-26 08:19:24
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
电子制作(2018年11期)2018-08-04 03:25:38
测绘科学与工程(2016年5期)2016-04-17 06:51:15
电子设计工程(2015年3期)2015-02-27 12:03:45
发明与创新(2015年30期)2015-02-27 10:39:52
河南科技(2014年14期)2014-02-27 14:11:53