
汽车电子标识在汽车试验场运营管控中的应用
2022-11-02 08:54施磊,朱遥
汽车实用技术 2022年20期
施 磊,朱 遥
(中汽研汽车试验场股份有限公司,江苏 盐城 224100)
基于射频识别的汽车电子标识技术从开始研究到应用推广已发展十余年。2014年至2017年,由公安部交通管理科学研究所牵头组织,多部委联合参与的机动车电子标识国家标准工作组开展了一系列研究验证工作,包括在国内各汽车试验场进行的极限速度、极限高低温和高湿环境的标准验证测试。2017年12月,国家发布了机动车电子标识通用规范、安全技术要求、读写设备规范等六项国家标准。在2021年3月公安部发布的《道路交通安全法(修订建议稿)》第十二条中规定“准予登记的机动车应当符合机动车国家安全技术标准,并按规定安装电子标识。”另外,在2018年3月交通运输部发布通知,也明确了省内高速公路多义性路径识别系统建设目标,以实现车辆按实际路径收费。
场地试验是汽车产品研发的核心环节,随着汽车产业的发展、市场环境竞争的加剧、汽车研发周期和质量要求的提升,国内综合性汽车试验场地资源愈加紧缺。汽车试验场为整车性能集成开发测试提供各类试验道路,每条道路上可同时开展多厂家、多车型、多工况的试验项目。虽然每条道路都有对应的管理规则,但是对于道路内车辆的活动是否遵循管理规则的监管,试验场大多缺少可靠有效的手段。基于汽车电子标识技术,通过路端识别设备及云端系统平台,可对试验道路内试验车辆进行全自动、全天候、准确可靠地识别和管理规则符合性地判定,并可实时将违规和异常情况报送调度员,从而实现场地安全管理和高效运行的主动调度。
1 车辆识别技术
在社会道路交通监管和汽车试验场管理中,当前主要有三种车辆识别技术的应用,在不同的应用场景下各有优劣。
1.1 基于视频图像的物理车牌识别技术
交通管理部门对社会车辆的监管目前主要利用基于视频图像的物理车牌识别技术。通过监控设备对车辆进行抓拍,将抓拍到的图像进行处理,取出有效的车牌区域后对区域内字符进行分割和识别,进而完成车牌信息的识别,工作流程如图1所示。由于对车牌识别是在监控设备抓拍的静态图片上进行的,因此对视频图像监控设备抓拍的图片质量要求较高,但视频图像监控设备容易受到光线、雾霾、沙尘、灯光等外界环境因素的影响,对于假牌、套牌等违法行为也无法准确辨别。研究表明,基于视频图像的物理车牌识别平均准确率约为80%,环境良好时的准确率约为95%,系统对通信网络的要求较高,并且数据传输和查询压力相对较大。

图1 车牌识别系统工作流程图
1.2 基于车载GPS模块的5G高精定位技术
随着智能网联汽车的发展,目前部分汽车试验场和智能网联汽车测试示范区为实时监管试验车辆,逐步建立了覆盖测试区域的5G高精定位车辆运行监控管理平台。由于试验场内各道路之间距离较小,且在运营管控中需要区分车道,所以传统的全球定位系统(Global Positioning System, GPS)定位无法满足需求。为实现实时精准的车辆信息获取,首先需要在测试区域内布置5G移动通信网路作为车载单元(On Board Unit, OBU)(GPS模块)与各系统之间的通信载体;其次需要建设连续运行参考站(Continuously Operating Refe- rence Stations, CORS)用于解算实时动态(Real Time Kinematic, RTK)信息,实现RTK数据的交互;而后OBU获取RTK数据后结合自己GPS位置信息解算实现厘米级定位,并通过5G网络将精准的位置信息发送至系统;最后系统接收OBU的数据信息并结合高精度地图进而实现车辆实时位置显示。该技术同样会受环境、行驶路径、天气等多种因素影响,定位可靠性、准确性及连续性存在信号丢包等不可控性。通过验证发现,基于车载GPS模块的5G高精定位技术试验车辆的识别平均准确率约为97%,气象环境较差时的准确率约为95%,对未安装车载终端OBU的车辆或OBU无供电时的识别率为0。其架构图如图2所示。

图2 5G高精定位车辆运行监控管理平台体统架构图
1.3 基于汽车电子标识的识别技术
汽车电子标识俗称“电子车牌”,是安装于汽车前挡风玻璃内侧的射频识别(Radio Frequency IDentification, RFID)标签(无源标签卡或OBU)。如图3所示,当安装有电子标识的车辆进入读写器天线的读取范围后,电子标识将信号发送给路侧读写器,读写器接收信号并对其解调处理,从而实现非接触、不停车地车辆自动识别和监控。汽车电子标识具有唯一性,其识别过程精准快速,且其芯片中储存的信息安全可靠,使用寿命超过10年。基于5.8 GHz DSRC技术的路径识别系统,通过标识站点与OBU的双向通信,可实时采集车辆信息,进而广泛应用于高速公路联网收费防逃费、交通诱导及出行信息服务、营运车辆监管等。研究表明,基于该技术对200 km/h速度下行驶车辆的识别准确率大于99%,并且基本不受天气、环境和时间影响。

图3 电子车牌识别系统的基本工作流程
1.4 汽车试验场运营管控中的应用对比分析
汽车试验场各试验道路进出口都有安装道闸系统,用以管控车辆进出道路并记录道路用时以结算费用,但对试验车辆在道路内的活动,调度员仅可通过监控系统进行随机察看,监管模式相对被动。汽车试验场一般为24小时连续运行,且场内大多是研发阶段的试验车辆,所以几乎没有物理车牌且部分车辆也不具备安装物理车牌的条件,车辆进出道闸主要通过车端OBU或车卡与道闸通信感应。各条试验道路相对独立且封闭,试验车辆的行驶工况多变且相互间存在一定的影响冲突。所以,及时、准确、可靠地识别试验道路内的所有车辆,才能建立场内测速、违规监管、流量统计、里程统计、特殊计费结算依据等工作的有效手段。结合汽车运营管控的需要,从不同维度对三种车辆识别技术的应用对比分析大体如表1所示。

表1 车辆识别技术在汽车试验场运营管控中的应用对比
2 汽车电子标识技术应用可行性验证
精准掌控试验道路内所有车辆及人员的活动是汽车试验场安全管控的基础。汽车厂家为开发验证车辆的安全性、操乘性及可靠耐久性等,试验车辆的行驶工况相比于社会道路一般会非常严苛和极限。高速环道作为汽车试验场的主体设施,是一条用于试验车辆连续高速行驶的环形封闭道路。由于高速环道内的试验车辆行驶速度较高、车流量较大、试验类型繁多、行驶工况复杂,所以在道路管理规则中明确规定了各个车道的最高和最低限速,并且限制了超高速(超过200 km/h)试验开展的时段。本文以高速环道为例,通过集成电子标识识别设备和测速雷达,并对试验场定制化的OBU(5.8 GHz)进行联调,最后对路侧设备不同安装方式下车辆的超高速识别、相邻车道并排行驶识别、同车道小间距连续识别开展了实地验证。
2.1 验证方案
高速环道全长7.8 km,由南、北两个弯道和东、西两个直道无缝衔接,全路段只有西侧直线段中部区域上方架设有桥体并具备识别设备正向安装的条件。考虑全路段站点的布置和安装条件,本次验证需对设备正向和侧向两种安装方式开展功能验证。另外,由于高速环道具有多个车道,开放时段车流较大,且识别设备的信号接收范围要比车道宽,所以同时需要验证在相邻车道有车并排行驶和多车纵向小间距行驶时,设备是否能够准确识别车辆并与测速对应。
本次验证的程序为临时编写,所以后台软件记录如下信息即可:OBU ID(对应车辆)、路侧单元(Road Side Unit, RSU)ID(对应识别位置)、速度值和识别时间。另外,由于测速雷达的安装角度及参数调试会影响其测速准确性,而验证现场安装条件和调试时间有限,考虑到雷达测速技术是成熟的,所以验证对测速精度不作要求。
2.2 主要设备
本次验证用到的主要设备如表2所示。为证明技术应用的可行性,本次同时对两个厂家的电子标识识别设备开展了验证。设备实际安装情况如图4、图5所示。

图4 桥体正向安装

图5 路侧L杆侧向安装

表2 设备的主要功能及技术要求
2.3 验证数据
根据验证方案逐项开展后所记录的数据,部分列举如表3、表4、表5所示。
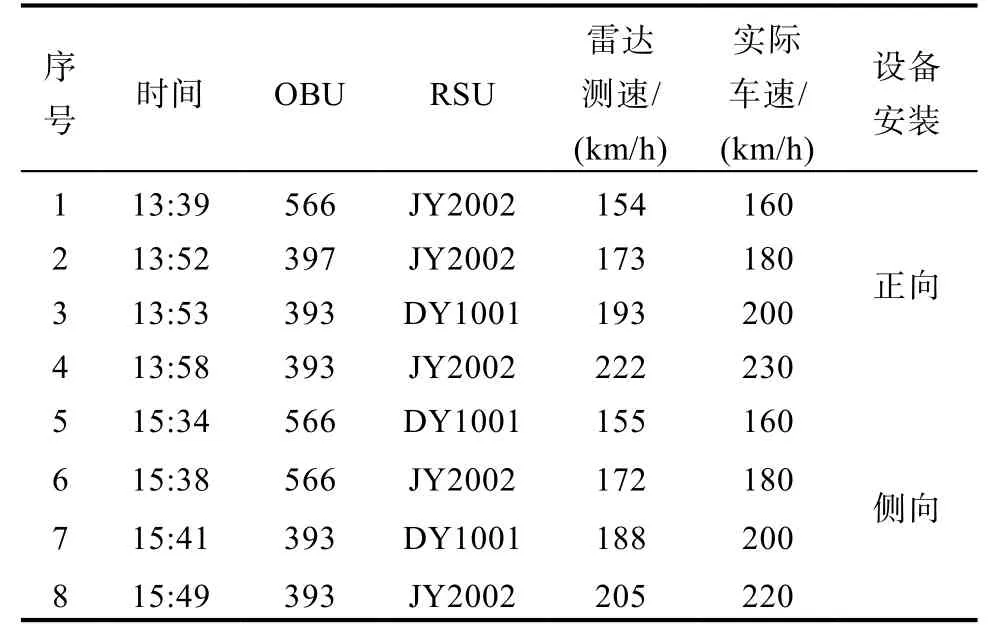
表3 超高速识别验证数据(部分)
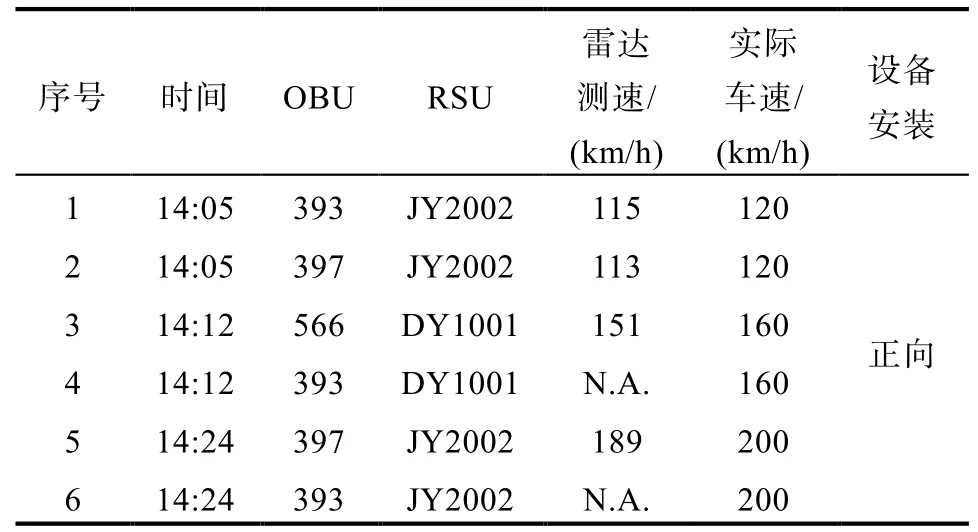
表4 相邻车道同时识别验证数据(部分)

表5 同车道连续识别验证数据(部分)
2.4 验证结果
(1)正向和侧向安装方式下,设备都能对信号范围区域内的车辆准确识别并匹配测速,验证过程未出现漏识别或误识别的情况。
(2)对于200 km/h以上速度行驶的车辆(最大V-Box车速为232 km/h),设备可准确识别车辆并匹配测速,验证过程未出现漏识别的情况。
(3)RSU信号范围宽度为6 m,现场的安装对两个车道的覆盖度较好;测速雷达的检测范围宽度约4 m,对最高车速车道覆盖度较好、对相邻车道的覆盖度较差。所以,同一车道多车小间距行驶时,集成设备可准确识别车辆并匹配测速,验证过程未出现漏识别或误识别。但相邻车道并排行驶时,集成设备仅可准确识别车辆,不能较好地匹配测速,这有待更换测速雷达的类型及充分安装调试后作进一步的验证。
3 在汽车试验场运营管控中的应用
从应用可行性验证结果可以确认,基于5.8 GHz DSRC的汽车电子标识识别技术对于汽车试验场内无物理车牌的试验车辆识别有一定适用性。汽车电子标识作为试验车辆的“电子身份证”,通过路端RSU与其他电子监测设备交互并接入定制开发的后台系统,理论上可实现对道路内所有试验车辆各类活动的监管。结合汽车试验场不同测试道路的外形尺寸、功能用途、使用规则、交通流特征以及运营管控需求等,可在如下几个方面开展应用。
3.1 测速及违规监管
对于环形试验道路或易发生事故的路段,通过合理的布局点位,集成识别设备和电子监测设备(如测速雷达、监控摄像头、交通事件检测仪等),与试验场管理系统信息化交互后,可实现对试验道路内车辆活动的自动监管。所产生的相关记录及数据可实时回传系统,异常情况和违规行为能够及时通过后台向调度员发出预警并直接显示对应车辆的相关信息。这不仅能使调度员更加主动地掌握试验道路运行状况,还能帮助场地管理部门及时介入和解除安全隐患,规范场内的不安全驾驶行为,并且提供可溯源的记录材料。
3.2 耐久试验车辆里程计费依据
大部分汽车试验场中的耐久试验车辆计费方式是基于里程单价进行的,而试验里程的计费依据当前主要为车辆入场和离场时的里程表数字照片。考虑到耐久试验车辆的项目周期较长,期间车辆里程可能包含有一定的社会道路摆渡里程,且人工拍照存在不及时和管理溯源度不够等问题,所以需要借助信息化手段来获取里程计费依据。由于耐久试验车辆多是以确定的试验循环工况,按照统一的试验规范要求和路径重复行驶,故可在耐久试验道路必经之处的对应车道外侧布置电子标识识别设备。通过车辆识别次数和该路段单次通行的平均里程,可计算出其在该路段的行驶里程数,对各条耐久试验道路的行驶里程数计和,便可获得整个项目期间在试验道路中的总里程数。与试验场管理系统交互后,可实现“一键结算”,从而大大减少人工干预。
3.3 道路交通流特征统计
对于安全测试容量较大的试验道路,如高速环道、直线性能路等,共享使用道路的多个试验车辆所执行的试验类型不同、行驶工况复杂多变、相互之间会有一定的影响和冲突。合理地布局点位,开发有效的后台软件算法,通过对道路内各局部区域交通流数据的获取和计算,结合对应试验道路条件及运行特征,可构建试验场道路运行指标状态评价体系,指标包括交通流运行速度指标、密度指标、冲突指标等。基于试验道路运行指标数据的实时动态获取,考虑特殊试验工况车辆的渗透率以及气象环境对运行管控的影响,从而建立场地调度管控量化判定标准及动态风险预警管控工具,减小各测试车辆试验工况执行间的冲突及试验安全风险,最终实现全方位、标准化、安全高效的场地运行管控新模式。
3.4 耐久试验规范执行过程监控
耐久试验车辆需要在汽车试验场的不同试验道路上按试验规范循环行驶一定里程。为使不同车辆的试验结果可以相互对比,所有车辆必须按照统一的规范行驶,所以驾驶人员的驾驶行为直接会影响试验的有效性。根据耐久试验道路各路段的空间布局和试验规范体系的通用要求,合理地选择点位并布置识别设备,通过OBU识别车辆以统计该车辆在各路段内行驶的圈数,并且根据路段长度计算平均车速。与耐久规范下标准行驶状况数据进行对比,不仅能了解该车辆耐久试验规范的执行情况及驾驶员的驾驶表现,还可以对比不同班次的规范执行一致性,从而及时发现和纠正不规范的驾驶行为,以保证试验考察目标的有效达成。
4 结语
本文从汽车试验场运营管控的需求出发,为实现对试验道路内无物理车牌试验车辆的识别和自动化监管,探究对比了三种不同车辆识别技术对于汽车试验场应用的锲合度。为进一步验证汽车电子标识技术在汽车试验场中的应用可行性,本文以高速环道为例,对电子标识识别设备在不同安装方式下对车辆的超高速行驶、相邻车道并排行驶以及单车道小间距连续行驶识别开展了实地验证,确认了基于5.8 GHz DSRC的汽车电子标识识别技术具备汽车试验场运营管控的应用可行性。最后,根据汽车试验场运营经验提出了四点汽车电子标识技术的具体应用方向及思路,以供 国内各试验场参考。
猜你喜欢
中国应急管理科学(2022年1期)2022-04-18
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
信息技术时代·上旬刊(2020年1期)2020-09-10
环球时报(2018-10-19)2018-10-19
无人机(2018年12期)2018-09-10
商情(2012年48期)2017-11-08
小天使·四年级语数英综合(2011年4期)2011-06-30
人民周刊(2009年12期)2009-01-25
