
基于BIM模型的火灾探测器自动布置方法研究
2022-11-01 05:40马可天王佳
科学技术与工程 2022年26期
马可天, 王佳
(北京建筑大学电气与信息工程学院, 北京 100044)
消防设计在绘图工作中十分繁琐,涉及的设备种类是电气设计中最为复杂的,其中设备布置比较繁琐的当属火灾探测器[1]。对于一座大型办公建筑的火灾探测器布置工作而言,设计师甚至需要在一张平面图中布置几十个探测器,工作量大且操作单调。当前,设计单位通常采用AutoCAD绘图软件进行绘图设计。运用AutoCAD进行绘图工作时,因二维平面作业方式硬性限制,在设计效果呈现上不够直观,且设计院各个专业之间协同效率差使得电气设计的绘图效率较低。BIM绘图软件可以呈现建筑物的三维模型展示效果,且设计单位各个专业可以在同一建筑模型里进行共同作业。因此,本研究提出一种基于BIM的火灾探测器自动布置方法,实现自动识别、提取建筑模型内部空间,并根据消防规范中火灾探测器的布置规则,实现房间内布置火灾探测器的自动布置。
目前,中外有关基于BIM在室内自动布置消防设备的研究鲜少。现有有关自动设计的研究大多是有关自动抗震设计方面的应用。Daniele等[2]提出了基于建筑信息模型的非结构元件的自动抗震设计,实现了在建筑模型内自动布置洒水喷淋管道的设计。陈达[3]提出了基于AutoCAD的综合建筑抗震支吊架的自动设计的研究,实现地铁管道抗震支吊架的自动布置。还有一部分研究是针对在建筑平面内自动布线的研究。傅军栋等[4]提取一种基于混合粒子群的三维建筑电气自动布线设计方案,建立了一种符合办公建筑内的数学模型。孔令明等[5]开发了一种自动三维布线系统,解决了在铁路信号系统大规模线缆布设时效率低的问题。
针对目前消防设计存在的可视化程度低、人工设计工作较复杂且各专业协同性差导致的绘图效率低等问题。现提出一种在房间内自动布置感烟探测器的方法,根据三维凸壳增量算法和三维模型的布尔运算算法识别、提取出模型内部空间,根据《GB50116—2013火灾自动报警系统设计规范》中火灾探测器的布置规则,实现房间内火灾探测器自动布置功能。
1 模型内部空间提取方法
空间表示实际中或理论上界定的区域或体积,室内空间是用于在建筑物内提供某种功能的区域或体积[6]。在BIM软件中,IfcSpace用于构建建筑物的空间结构。IfcSpace相关的语义信息存储在建筑模型的IFC文件中,这些信息定义了建筑模型中每一部分的空间区域[7]。然而在实际应用中,大多数的模型在设计之初缺乏IfcSpace语义信息的设定,这就使得想要在一个完整的模型内提取出单独的房间和区域十分困难,为了解决这个问题,本文研究提出了一种提取模型内部空间的方法。
首先,定义模型内部空间:表示空间内通过墙构件分割成的具有功能性的空间体积。模型内部空间通常包含楼板、墙、柱子、家具等构件设施,是一个在室内环境下封闭的功能区域:如房间、走廊或楼梯间等。为得到模型内部空间区域,运用三维凸壳增量算法求取房间凸包,结合三维几何体的布尔运算进行模型凸包与模型的“作差”处理,最终得到模型内独立的空间区域,再在得到的室内空间内布置火灾探测器。模型内部空间提取及探测器的布置流程图如图1所示。
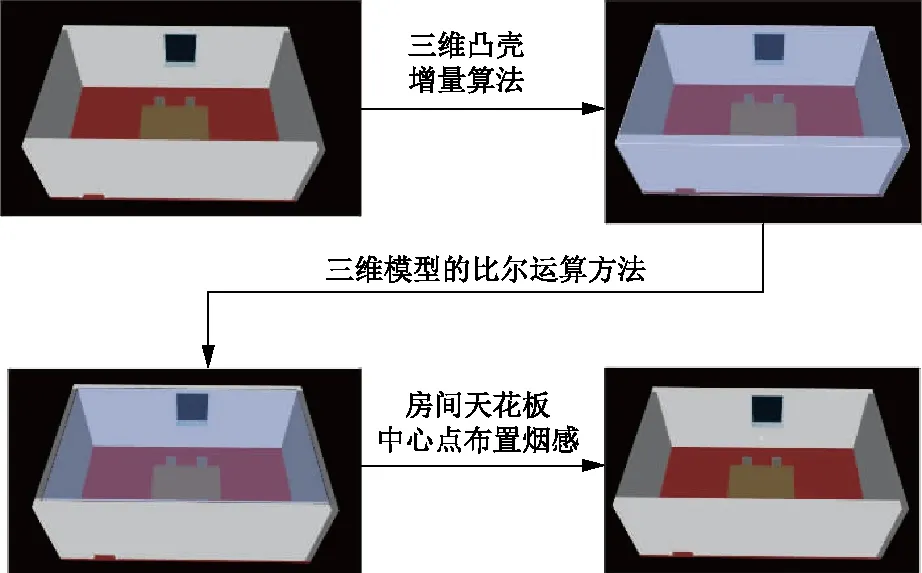
图1 模型内部空间提取及探测器的布置流程图Fig.1 Flowchart of model interior space extraction and detector layout
1.1 转换坐标系
很多BIM模型在绘制时创建的x、y、z坐标并不平行于模型本身的长宽高。为了方便研究,首先通过4×4旋转偏移矩阵对模型进行旋转以使得模型的长宽高分别平行于x、y、z坐标轴。对于一个普通的BIM模型,建模时的z轴通常是建筑物垂直于地板高度方向的坐标。但对模型x、y轴的设定却不一定平行于模型的长、宽方向。本文引入旋转偏移矩阵,使模型的长、宽分别绕z轴旋转至与x、y轴分别保持平行的角度。转换x、y、z坐标的公式写成4×4矩阵的形式,即
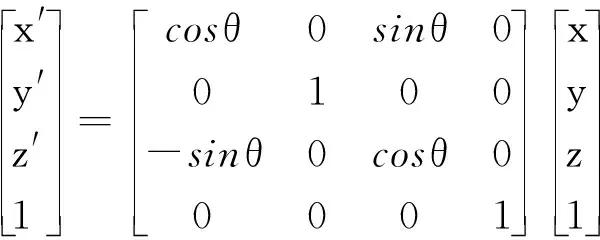
(1)
式(1)中:θ为建模之初x、y坐标底面与实际模型底面之间的夹角。
根据式(1),得到经过旋转偏移之后模型对应的坐标值x′、y′、z′,以使得模型的三维坐标轴与模型的长宽高分别相互平行。
1.2 三维凸壳增量算法求取房间凸包
包围盒的类型包括球体、轴对齐包围盒、有向包围盒以及凸壳/凸包等。凸壳通常可以被认为是包含模型全部点集合的最小凸多面体[8]。本文研究利用三维凸壳增量算法求取模型凸包,得到包含建筑模型全部点集合的最小凸多面体。三维凸壳增量算法的原理如图2所示。

图2 三维凸壳增量算法图示Fig.2 Diagram of 3-D convex hull increment algorithm
图3为模型凸包提取过程流程图。首先在模型中提取P1、P2点,从模型中找到与P1、P2不共线的第三点P3,将P1、P2、P3组成平面N1,再从模型中找到与N1不共面的点P构成多面体S,任取一点M判断其位于多面体S内部或外部,若位于外部则进行融合组成新的多面体。以此方法遍历模型内全部点,将模型中全部点进行上述方法的筛选,组成新的多面体,最终得到完整模型的凸包。如图4所示。
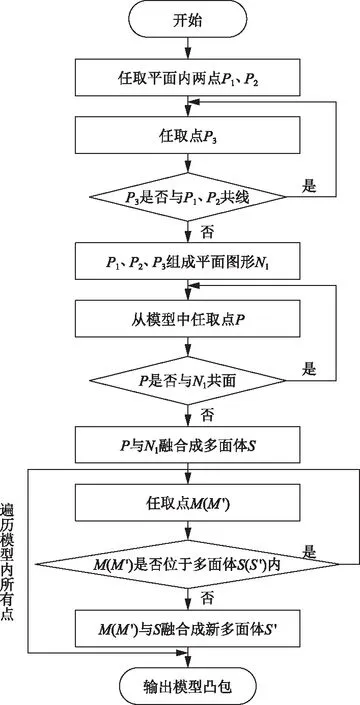
图3 模型凸包提取过程流程图Fig.3 Flowchart of model convex hull extraction process

图4 模型凸包示意图Fig.4 Model convex hull diagram
1.3 三维布尔运算算法提取模型内部空间
求得的模型凸包是包含全部模型内部点集合的最小凸多面体。为进一步划分出模型内部空间区域,需要将模型凸包与模型进行“作差”处理,即通过三维几何体的布尔运算删去两者相交部分,得到模型内部的空间体积。三维布尔运算是对几个三维立体图形进行求交、并和差等运算[9]。假设有两个立体图形a和b,根据计算机图形学运用式(2)对模型进行合并、作差等处理。
(2)
式(2)中:ainb表示a立体图形的表面处于b立体图形内在的部分;aoutb表示a立体图形处于b立体图形外部的部分;(bina)-1表示b的表面处在a图形内部部分的补集。
根据上述方法划分出模型内部空间,每一个划分出的模型内部空间代表含有某种功能的房间。每一个房间用包围盒表示以便于设计师进行可视化区分并方便进行后续火灾探测器的布置工作[10],如图5所示。进而完成火灾探测器的布置,如图6所示。
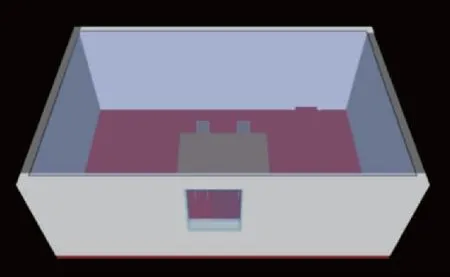
图5 房间内部包围盒Fig.5 Room interior bounding box
图6 火灾探测器的布置Fig.6 Layout of fire detector
2 火灾探测器自动布置方法
消防设备在室内布置时都有其相应的布置规则,其中火灾探测器的布置较为复杂,需要根据房间面积大小、功能类型来选择探测器的类型及相应的布置方式。
2.1 火灾探测器的种类选择
火灾探测器的分类按照物质在燃烧过程中产生的产物进行分类,如图7所示,分为物质转换和能量转换两大类。物质转换又分为气体产物和固体产物,分别对应气体探测器和感烟探测器。能量转换有两种:温度和火焰光,分别对应感温探测器、火焰探测器[11]。表1对主要探测器及其适用房间类型进行了汇总。

图7 火灾探测器的分类Fig.7 Classification of fire detectors

表1 不同探测器及其适用场所的划分Table 1 Distribution of different detectors and their suitable locations
2.2 火灾探测器的布置规则
在对房间进行火灾探测器的布置时,首先要对设计场所的规模、功能用途进行分析与判断。作为火灾报警系统中最重要的设备,需对探测器的可靠性与实用性进行考虑[12]。探测器按照安装方式分为点型探测器和线性探测器。对于公共建筑而言一般安装点型探测器,点型火灾探测器的布置规则[13]如下。
2.2.1 火灾探测器布置个数的判定
对房间进行点型火灾探测器的布置时,根据《GB50116—2013火灾自动报警系统设计规范》中布置要求对房间内所需布置的探测器个数N进行求取,公式为

(3)
式(3)中:S为房间面积;K为修正系数;A为保护面积。对于普通的办公楼、实验室等场所,K一般取值1.0;根据房间面积、房间高度以及屋顶坡度的不同,对房间内所需布置探测器的保护面积A和保护半径R进行取值选择,如表2所示。

表2 探测器保护面积和保护半径的选择Table 2 Selection of protection area and radius of detector
2.2.2 火灾探测器布置间距的判定
火灾探测器的安装间距依据消防设计规范中探测器安装间距极限曲线图进行判定。本文研究选取保护面积为80 m2的极限曲线进行探测器间距的选择,如图8所示。安装间距的极限曲线根据式(4)和式(5)进行绘制而成。

图8 探测器安装间距的极限曲线Fig.8 Limit curve of detector installation spacing
ab=80
(4)
a2+b2=(2R)2
(5)
3 实验验证
针对目前消防设计存在的可视化程度低,且人工设计涉及专业多、设备布置数量大导致的绘图效率低等问题,提出一种在房间内自动布置火灾探测器的方法。创建火灾探测器自动布置插件以实现对模型房间内火灾探测器的布置。运用三维增量凸壳算法提取模型的凸包,根据三维布尔运算对模型凸包与模型进行“作差”处理,求得模型内部空间区域。根据消防规范相关条例对房间火灾探测器数量及方式进行相关计算。最后实现对模型房间内火灾探测器的自动布置。
为验证本文提出方法的可行性,对北京建筑大学科研楼进行火灾探测器自动布置实验。该科研楼为二级民用建筑,耐火等级为二级。选取科研楼模型的其中一层作为实验对象对建筑内部房间进行火灾探测器的自动布置实验。
首先在火灾探测器自动布置插件平台上传.ifc格式的建筑模型文件。上传后的科研楼模型文件效果如图9所示。

图9 科研楼模型效果图Fig.9 Model effect diagram of scientific research building
根据文中提出的三维凸壳增量算法求得该建筑模型的凸包,如图10所示。再根据三维布尔运算得到与模型“作差”处理后的内部空间区域。将这些内部空间全部用包围盒突出表示,每一个包围盒代表具有特定功能的室内空间。提取出的模型室内空间包围盒效果图如图11所示。

图10 科研楼模型凸包效果图Fig.10 Effect diagram of convex hull of scientific research

图11 科研楼模型空间区域包围盒效果图Fig.11 Effect chart of surrounding box in model space area of scientific research building
提取模型室内空间包围盒上表面,计算包围盒上表面面积,得到房间面积S。根据式(3),求得房间所需布置探测器的个数N。根据式(4)和式(5)得出探测器之间的安装间距a、b。得到房间内火灾探测器的布置参数即可完成对该科研楼火灾探测器的自动布置,效果图如图12所示。

图12 实现探测器布置的模型效果图Fig.12 Model effect diagram for realizing detector layout
本文方法在不使用传统绘图软件的基础上实现了在房间内自动布置火灾探测器的功能。火灾探测器种类繁多、数量大,对其进行绘图布置时工作效率低、重复度高。本文提出的方法可以提升消防设计中火灾探测器布置的可视化程度,减少因简单重复工作导致的绘图效率低等问题。
4 结论
提出了一种在BIM模型内自动布置火灾探测器的方法。创建火灾探测器自动布置插件对模型进行探测器的布置工作。主要方法是应用三维增量凸壳算法求取模型凸包,根据三维布尔运算提取模型内部空间。根据规范计算得出火灾探测器的布置个数与间距,最后完成房间内火灾探测器的自动布置工作。本文研究相对传统二维平面绘图方式,提升了绘图设计工作的可视性,增强了设计师对复杂建筑模型的理解力,避免因建筑工程庞大且布置工作单调等问题引起的绘图错误,是设计绘图工作从人工参与多到实现自动化的重要转变。但是该方法依旧存在着一定的局限,比如该方法仅适用于规则的封闭房间,对开放式或者不规则的空间不适用。因此,在未来将对不规则空间的探测器布置进行进一步的研究。
猜你喜欢
中学生天地(B版)(2022年1期)2022-03-07
中国-东盟博览(政经版)(2020年8期)2020-09-27
少儿画王(3-6岁)(2020年12期)2020-09-13
喜剧世界·中旬刊(2020年11期)2020-09-10
诗潮(2018年4期)2018-04-26
读者(2017年10期)2017-04-26
科技创新导报(2016年23期)2016-12-23
建材发展导向(2016年5期)2016-10-19
儿童故事画报·发现号趣味百科(2015年9期)2015-11-04
